 |


Основы классификации экономико-математических моделей с точки зрения характера их применения
|
|
|
|
Модель
Под моделью подразумевается отображение каким-либо способом процессов, происходящих в реальном объекте. Если эти процессы описываются с помощью математических символов, формул и теорем, то такая модель называется математической.
Рассмотрим, каким образом строится экономико-математическая модель сложной системы. На рис. 1.1.1 показана схема модели сложной системы.
| СИСТЕМА | |||||
| Внешняя среда | X1 X2 | α 1, α 2.. z 1, z2 … z η | α k | Y1 Y2 h^ i^ | Внешняя среда |
| Хп | Y m | ||||
Рис. 1.1.1. Схема модели сложной системы
Элементы Хх, Х2,..., Хп называются входами системы (входными переменными); Y 1, Y 2,..., Ym — выходами системы (выходными переменными); Z1, Z2;..., Zη, характеризуют состояние системы. Индексами α1,α2, …α k обозначены параметры системы. Входы и выходы осуществляют связь системы с внешней средой, т.е. другими системами. Элементы Z1, Z2,..., Z_η фиксируют все изменения состояния системы, происходящие за счет поступления входных сигналов и вследствие внутренних процессов, протекающих в ней.
Допустим, необходимо построить модель предприятия, выпускающего велосипеды. Представим предприятие в виде системы и построим ее модель. В качестве входов системы можно принять такие переменные: X1 — поставки сырья для производства велосипедов; Х2 — поставки оборудования; Х3 — поток людей, нанимающихся на работу; Х4 — план выпуска продукции и т.п. Состояниями такой системы можно назвать: Z1 — текущее время; Z2 — дефицит оборудования; Z3 — соответствие фактической численности работающих нормативной; Z4 — степень выполнения плана на текущий момент и т.п. Параметры системы α1, а2,...,α k могут характеризовать всевозможные нормы и нормативы, принятые для данного предпри
|
|
|
ятия. Выходы системы отображают результаты ее функционирования и могут представлять собой следующие величины: Y1 количество выпущенной продукции; Y2 ее стоимость; Y3 - производительность труда; Y4 - размер полученной прибыли и другие показатели деятельности предприятия.
В конкретных моделях систем входы, выходы и состояния связаны между собой функциональными или статистическими зависимостями. Задавая определенные значения входных сигналов, исходных параметров и зависимости между переменными, при помощи определенных экономико-математических методов осуществляют исследование модели по интересующим показателям.
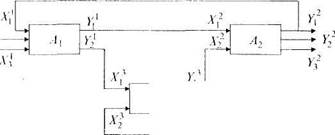
Модели различных систем могут образовывать более крупные и сложные модели. Для этого осуществляют сопряжение отдельных моделей через их входы и выходы (рис. 1.1.2).
| j—■—I >'з3 |
 AV
AV
Рис. 1.1.2. Соединение трех моделей систем в одну
Соединение моделей между собой задается при помощи операторов сопряжений, которые указывают на наличие или отсутствие связей между отдельными входами и выходами. Запишем оператор сопряжения для модели, изображенной па рис. 1.1.2. Он представлен в матричной форме (табл. 1.1.1). При наличии связей между входами и выходами в матрице проставляется цифра 1, в противном случае клетка матрицы остается пустой. Любую совокупность моделей систем, сопряженных друг с другом, можно представить в виде одной модели системы с новыми наборами входов, выходов, состояний и параметров.
Таблица
Оператор сопряжения
| Вход | Выход | |||||||
| Y1¹ | Y 2 ¹ | Y1 ² | Y2 ² | Y3² | Y 1³ | Y2³ | Y3³ | |
| X 1 ¹ | ||||||||
| X 2¹ | ||||||||
| X 3 ¹ | ||||||||
| X 1² ² | ||||||||
| X 2 ² | ||||||||
| X 1 ³ | ||||||||
| X 2 ³ |
Функционирование системы во времени характеризуется появлением входных, выходных сигналов и изменением состояний в векторных пространствах входных, выходных сигналов и состояний.
|
|
|
Под пространством сигналов или состояний понимают п-мерное векторное пространство типа
А=А1*А2* …*Аγ* …* Аn, γ = 1,n
Точка в пространстве соответствует конкретному значению сигналу или состояния. Так, если имеется, пространство состояний
Z = Z1 х Z2 х... х ZyX... х Zn где Zy e Z — ось пространства, то
конкретное состояние системы задается координатами точки Z < Z в пространстве состояний. Координатами точки Z в пространстве Z являются проекции пой точки па все оси пространства, т.е. Z = (Z1, Z 2|,…, Zn)
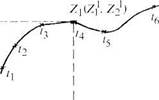
Частными случаями пространств сигналов и состояний являются двумерное и трехмерное пространства. Наиболее наглядно можно представить двумерное пространство. На рис. 1.1.3 показаны состояния некоторой системы в пространстве состояний.
Последовательность состояний системы в различные моменты времени t1, t2, …tn называется траекторией ее движения. Траектория системы показывает изменение се состояния во времени.
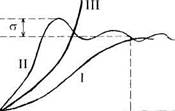
Реакция системы на какой-либо входной сигнал или внутреннее изменение называется переходным процессом. Понятие переходного процесса можно применять как к состояниям, так и к выходам системы. Поскольку при моделировании нас интересуют значения выходов системы, то чаще переходный процесс системы относят к выходным сигналам. Переходные процессы систем изображены на рис. 1.1.4. Они характеризуются продолжительностью Т, величиной перерегулирования σ (максимальным отклонением У от Y0 за время переходного процесса), величиной колебательности переходного процесса £ (коэффициентом демпфирования) и т.п. Переходный процесс — это показатель функционирования системы во времени, указывающий, как быстро и в какое новое состояние она перейдет в результате появления входного сигнала или внутреннего изменения. Система находится в равновесии, если ее состояние остается неизменным неограниченное время. У системы может быть несколько состояний равновесия. Если система переходит из одного состояния равновесия в другое под действием входных сигналов или внутренних причин, то она называется устойчивой. На рис. 1.1.4 переходные процессы I и II соответствуют устойчивой системе, а процесс III неустойчивой.
|
|
|
Как правило, все системы, которые подлежат моделированию, являются устойчивыми.
|
 7,\ Z2
7,\ Z2
Рис. 1.1.3. Пространство состояний системы
|
 Y
Y
Т
Рис. 1.1.4. Переходные процессы систем
Управление и моделирование
Под управлением системами будем понимать процесс, ориентирующий некоторую систему на достижение определенной цели. Понятие управления имеет двоякое содержание: управление как управленческая деятельность и управление как процесс.
При рассмотрении управления как управленческой деятельности обычно существуют объект управления и управляющий орган. Управленческая деятельность управляющего органа сводится к определению цели управления, методов и средств ее достижения, постановке задач управления, выбору исполнителей, постоянному контролю.
Понятие управления как управленческой деятельности состоит в конкретном содержательном отношении субъекта к объекту управления. Так, например, директор предприятия, осуществляя управленческую деятельность, должен хорошо знать экономику, технику, технологию производства, людей, с которыми работает, ясно представлять свои перспективные цели и цели на отдельных этапах, знать законы.
Управление как процесс рассматривается независимо от конкретных характеристик объекта и субъекта. В этом случае управление сводится к определению параметров процесса управления и исследованию структурных особенностей процесса, последовательности его этапов. При такой трактовке управления обычно выделяют управляющую и управляемую подсистемы.
Понятие управления как процесса дает возможность управлять, не познавая полностью объект управления. Например, можно, не зная устройства автомобиля, научиться им управлять; можно настроить телевизор, не имея представления о его конструкции. Здесь налицо функциональный подход к управлению. Различие двух понятий управления наглядно проявляется при принятии решений. Если управление рассматривается как процесс, то принятие решения сводится к выбору одного из вариантов управления, оптимального, по заранее заданному критерию. Критерий в данном случае не является предметом принятия решения. При рассмотрении управления как управленческой деятельности субъект управления должен сам вырабатывать критерии и цели управления, корректировать их в процессе управления. В этом смысле управление как деятельность более широкое понятие, чем управление как процесс. Управленческая деятельность в целом гораздо менее формализуемое явление.
|
|
|
При экономико-математическом моделировании используются оба понятия управления, так как объектами исследования являются социально-экономические системы. Однако применение конкретных математических методов возможно только для объектов, имеющих определенную, заранее заданную цель функционирования. Экономико-математическое моделирование не занимается выработкой целей экономических объектов. Это сфера деятельности политической экономии и конкретных экономических наук. Экономико-математические методы определяют наилучшие пуги управления системой для достижения заданной цели системы. Таким образом, управление при экономико-математическом моделировании следует понимать исключительно как управление процессами. Управление в виде управленческой деятельности тоже присутствует в социально-экономических системах, так как они содержат в себе в качестве подсистем коллективы, вырабатывающие определенные цели. Но эти коллективы, или подсистемы субъектов, отражающие объективную реальность и вырабатывающие определенные суждения и цели функционирования социально-экономических систем, базируются в своей деятельности на принципиально иных категориях и поэтому не могут быть полностью формализованы в виде экономико-математических моделей.

|
Модель социально-экономического объекта, способного вырабатывать и корректировать цели своего функционирования, можно представить как обычную систему с дополнительными управляющими входами (рис. 1.1.5).
| Рис. 1.1.5. Модель системы с корректируемыми целями |
Управляющие входы, g1, g2..., gj предназначены для изменения цели функционирования системы, которое может произойти только из внешней для данной системы среды.
|
|
|
Всякое управление в таких системах осуществляется как информационный процесс: получение, обработка и передача информации. Изменение состояния системы в результате управления происходит па основе получения информации (поступления входных сигналов) и является реакцией на команду, которая вырабатывается в системе после анализа информации, содержащейся во входном сигнале.

|
Изменение состояния системы в результате управления показано на рис. 1.1.6. Здесь Z0 — исходное состояние системы, a Zn1, Z;n2, Zn3 — ее новые состояния, полученные при различной интенсивности управляющего сигнала.
| Рис. 1.1.6. Изменение состояния системы при различной интенсивности управляющего сигнала |
Управление системой неразрывно связано с понятием цели управления системой или просто цели системы. Под целью управления системой понимают определенное желаемое значение ее выходов при условии, что они в достаточной мере отражают состояние системы. Цель это своеобразный эталон функционирования системы. При моделировании цель системы представляется в виде целевой функции - математического выражения связей входов и выходов системы друг с другом, отражающего поведение системы с точки зрения целевой установки.
Цель системы -- идеализированное понятие. Обычно выходные сигналы или состояния системы находятся вблизи своих целевых значений или колеблются около них. Чтобы оценить степень приближения системы к ее цели, вводят понятие критерия достижения цели или критерия цели.
Критерием цели назовем правило, позволяющее оценить фактическое поведение системы (состояние входов, значение целевой функции) в сравнении с желаемым, целевым, поведением и зафиксировать достаточность или недостаточность этой оценки. По критерию цели отбирают оптимальный вариант поведения системы, в наибольшей степени отвечающий цели системы. Обычно критерии задают в виде минимума (максимума) целевой функции или значений выходов системы, однако это всего лишь частный случай. Существует достаточно большое число математических имитационных методов, которые позволяют существенно расширить возможности задания целевых функций и критериев целей.
Построение целевых функций систем является одной из важнейших задач экономико-математического моделирования. Рассмотрим основные принципиальные положения определения целевых функций систем.
Принцип однозначности требует наличия единственной целевой функции системы. Если в системе имеется несколько частных целевых функций А1, А2,… Аа, то их следует объединить в одну посредством какой-либо комбинации, например
А=А1К1 + А2К2+... + АаКа
где А - обобщенная целевая функция системы;
Kj коэффициенты относительной важности частных целевых функций, ј = 1, а.
Принцип управляемости выражает необходимость зависимости целевой функции от параметров управления системой (входных сигналов).
Принцип подходящей формы заключается в установлении такой формы целевой функции, при которой она имела бы практический смысл, экстремальность (т.е. обеспечивала получение максимума или минимума) и была бы однозначной.
В практических задачах встречается большое разнообразие типов целевых функций. Рассмотрим наиболее употребимые. Целевую функцию прибыли обычно задают в следующем виде:
F=∑Uί Vί - ∑ Cј Pј
ί ј
где Uί — цена ί-го вида продукции;
Vί — объем выпуска ί-го вида продукции;
Сј — стоимость единицы ј-го типа ресурса, израсходованного на изготовление продукции;
Рј — потребная величина ј'-го типа ресурса.
Выбор целевой функции такого вида позволяет обеспечить максимальную положительную разницу между объемом реализованной продукции и величиной затрат ресурсов, использованных для ее изготовления, т.е. максимальную прибыль.
Целевая функция себестоимости имеет вид
F = ∑ Cί (X k),
где Хk — к-й фактор, влияющий на себестоимость. Эта целевая функция отражает стоимость, связанную с осуществлением процесса производства. Обычно под переменными Хk понимают стоимость факторов, поддающихся управлению (стоимость материалов, топлива и т.п.), а функцию F минимизируют.
Целевую функцию качества некоторого процесса задают в виде квадратичной формы
F = ∑ ψј (Yј – Yј)²
где Y ј – требуемое значение качества ј-го параметра:
Yj фактическое значение качества ј-го параметра;
Ψј - положительный весовой коэффициент ј-го napaметpa.
Данная целевая функция качества обеспечивает минимизациию взвешенной суммы квадратов отклонений всех параметров от их требуемых значений.
Целевая функции времени выражает стремление минимизировать продолжи тельность процесса между двумя фиксированными граничными условиями и может быть записана в виде
t∫
Т = min ∫ dt
t0.
Понятие обратной связи лежит в основе большинства процессов управления и является фундаментальным. Что такое обратная связь?
| Рис. 1.1.7. Модель cue темы с обра тной связью |
В формальном представлении с позиции системы обратная связь, означает получение информации о результате управления. Выходной сигнал системы, несущий информацию о ее состоянии, должен поступить на ее вход. На рис. 1.1.7 представлена модель системы с обратной связью, осуществляемой через некоторый управляющий орган УО.
Приведем несколько примеров систем с обратной связью. Чтобы взять какой-либо предмет, человек протягивает руку, глазами следит за ее положением в пространстве и непрерывно управляем движением руки относительно предмета, исправляя ошибки направления ее движения. Здесь налицо система «человек - предмет - зрительная обратная связь - глаза - рука (через управляющий opган) - мозг».
В качестве систем с обратной связью можно представить процессы производства товаром и услуг. Через величину спроса рынок будет регулировать необходимый объем производства товаров или предоставления услуг.
Обратная связь в системах может быть отрицательной и положительной.
Отрицательная обратная связь характеризуется тем, что выходной сигнал, воздействующий на вход системы, имеет противоположный знак по отношению к входному, вызвавшему изменение состояния системы. Тем самым он нейтрализует в определенной степени входной сигнал. Отрицательная обратная связь обычно предназначена для поддержания системы в определенном устойчивом состоянии. Так, например, при поддержании постоянного уровня производства и потребления используются различные механизмы отрицательной обратной связи.
Положительная обратная связь характеризуется тем, что выходной сигнал, подаваемый в качестве сигнала обратной связи на вход, имеет одинаковый знак с входным сигналом и поэтому усиливает его действие. Системы с положительной обратной связью являются неустойчивыми. Они обычно находятся в стадии развития или гибели.
Типы управления. На практике встречается несколько чипов управления системами: жесткое (без обратной связи), с обратной связью, адаптивное.
Жесткое управление, или управление без обратной связи, является простейшим. В этом случае система полностью зависит от программы изменения входного управляющего сигнала. Такой вид управления применяется, когда зависимость изменения выходного сигнала от входного является известной и действие помех на систему не приводит к существенным искажениям ее выходных характеристик. Примерами жесткого управления могут служить управление токарным станком, автомобильным движением при помощи светофора, работа ЭВМ по заданной программе и пр.
Управление с обратной связью - наиболее распространенный тип управления, рассмотренный выше.
Адаптивное управление также является управлением с обратной связью и отличается от последнего наличием специального адаптивного (приспособительного) механизма, накапливающего и анализирующего информацию о прошлых управленческих ситуациях, вырабатывающего новую линию поведения на основе прошлого опыта в соответствии с заложенными целями и критериями.
Адаптивное управление присуще сложным системам, которым в процессе функционирования приходится изменять программы и стратегии поведения за счет обучения. Теория адаптивного управления пока не получила большого развития, как, например, теория споем с обратной связью, вследствие чрезвычайной сложности формирования принципов обучения.
Итак, мы рассмотрели наиболее важные понятия и идеи, используемые при моделировании социально-экономических объектов. Заметим, что категории «организация», «система», «структура» и связанные с ними понятия легко поддаются формальному математическому описанию.
Основы классификации экономико-математических моделей с точки зрения характера их применения
Экономико-математическая модель представляет собой отображение некоторых процессов, протекающих в моделируемом объекте, при помощи математических символов, уравнений, теорем. Естественно, всякая модель — всего лишь упрощенный образ объекта исследования, наиболее полно отражающий те черты объекта, которые интересуют исследователя. Например, если цель моделирования производственного предприятия — совершенствование производственного процесса, то наиболее точного и адекватного отображения требуют процессы движения материалов, полуфабрикатов, готовых узлов изделия, последовательность их обработки, сборки, ритмы движения конвейеров, процессы взаимного согласования производственных планов, календарные планы, графики и т.п. Обработка учетной информации, начисление заработной платы, расчет основных показателей работы предприятия, а также информационные связи между подразделениями аппарата управления не имеют особого значения при моделировании непосредственно производственного процесса и, как правило, либо вообще отсутствуют в его модели, либо присутствуют в виде констант или исходных данных.
Наоборот, если цель моделирования — совершенствование аппарата управления предприятием, то основным объектом моделирования являются информационные потоки, существующие в аппарате управления, методика их обработки и преобразования, процессы принятия управленческих решений.
Таким образом, экономико-математическая модель объекта отображает наиболее полно и точно только те черты и свойства объекта моделирования, которые интересуют исследователя.
В зависимости от природы объекта, целей, методов и особенностей его описания экономико-математические модели могут быть классифицированы по целому ряду признаков. Такими признаками являются, например, степень огрубления структуры объекта (модели агрегированные и детализированные); степень огрубления свойств, элементов и структурных отношений моделируемого объекта (модели детерминистские, вероятностные, модели с риском и неопределенностью); глубина охвата структурной организации объекта исследования (модели производственно-технологической структуры, модели структуры экономики, модели социальной структуры общества, модели окружающей среды и т.п.); тип изменения переменных
(модели с непрерывными, дискретными переменными и модели смешанного типа) и др.
Детальная классификация экономико-математических моделей по всем возможным основаниям пока отсутствует. Это обусловливается наличием разных точек зрения и подходов к экономико-математическому моделированию, отставанием философско-методологического осмысления новой области знаний.
Для экономистов, финансистов и менеджеров особый интерес представляет классификация моделей по характеру их использования. Попытаемся условно расчленить экономико-математические модели по возможности их применения в той или иной ситуации на конкретных примерах. Здесь принято [13] деление моделей на четыре класса: модели без управления, оптимизационные, игровые и имитационные.
Модели без управления
Экономико-математические модели без управления (дескриптивные модели) представляют собой в основном статистические модели (кривые роста, регрессионные линии), предназначенные для исследования объектов путем установления количественных соотношений между их характеристиками или параметрами.
Например, требуется определить зависимость потребления бытовых услуг от уровня доходов населения, обеспеченности бытовыми предметами на душу населения и других факторов потребления. Для этого составляют регрессионное уравнение
Y= a0 + a1x1+ a2x2 + … + a nx n,
где Y — потребление бытовых услуг на душу населения;
, х2,..., хп — факторы потребления;
а0, a1,..., аnп — коэффициенты уравнения.
Если известны коэффициенты а0, a1,..., ап, то зависимость потребления бытовых услуг от принятых факторов считается определенной. Она отражает реальную ситуацию только в среднем, или в статистическом смысле.
Приведем другой пример модели без управления. Требуется определить количество заместителей директора для типовых структур управления предприятием. В этом случае проводят статистическое исследование численности указанной категории работников на существующих предприятиях и выводят степенное уравнение. В частности, при определенной специализации количество заместителей директора Nзам определяют по формуле
Nзам = 0,0871N nnФ0°:1,
где Nnn — численность промышленного персонала;
Фо — основные и оборотные фонды.
Еще один пример. Пусть требуется определить парк предметов бытовой техники у населения в 2000 г. по данным за 1990—1995 гг. Предположим, что зависимость парка предметов бытовой техники от времени можно представить в экспоненциальной форме
r (t-1995)
X (t) = X 0 e
где X{t) — парк бытовых предметов в произвольном году /;
Xq — парк указанных предметов в 1995 г.;
r —.коэффициент роста;
е — основание натурального логарифма (е ~ 2,72).
С помощью приведенной формулы можно составить прогноз о том, сколько будет предметов бытовой техники у населения в 2000 г.:
r (2000-1995) 5r
X (200) = X 0 е = X 0 е
Подобный подход к прогнозированию парка бытовой техники у населения, конечно, не может обеспечить получение точных результатов. Он приведен для иллюстрации моделей данного типа, однако довольно часто применение аналогичных моделей позволяет изучать важнейшие народнохозяйственные процессы и пропорции.
Модели без управления применяют для изучения фактически существующих процессов, без вмешательства в их течение. Область применения этих моделей достаточно широка. К моделям без управления принадлежат модели экономики страны, расширенного воспроизводства, прогнозирования рождаемости, численности населения и т.д. Как правило, они дают общее представление об объекте. Процессы в моделируемом объекте отображаются в агрегированном виде и максимально обобщены. Поэтому модели без управления не дают полного представления об объекте моделирования и пригодны для изучения только самых общих изменений и тенденций.
Построение достаточно хороших моделей без управления требует большого количества специальной информации об объекте моделирования. Поэтому для построения моделей такого типа нужно быть специалистом в той области, к которой принадлежит данный объект или процесс моделирования. Одних математических знаний здесь, конечно, недостаточно.
Значимость моделей без управления велика — они позволяют изучать явления в целом, комплексно и устанавливают общие фундаментальные свойства объектов и процессов.
Оптимизационные модели
Важный класс моделей образуют оптимизационные модели. Их появление и применение вызвано необходимостью решения практических задач, возникающих в экономике и технике. Требовалось перевозить грузы с минимальными издержками, правильно выбирать режимы резания станков, регулировать частоту вращения электродвигателей, обеспечивать полеты самолетов по заданному курсу, раскраивать детали из листовых материалов с минимальными отходами и т.д. Решение таких задач стимулировало становление и развитие теории автоматического управления, теории информации и математического программирования. Постепенно эти научные направления расширились, обогатились практическими примерами. Выяснилось, что их можно применять для решения разнообразных задач независимо от их конкретной природы. В дальнейшем учеными были высказаны обобщающие идеи, введены основополагающие принципы и термины, которые объединили теорию автоматического управления, теорию информации, теорию систем и некоторые другие научные направления. В результате образовалась новая наука об управлении — кибернетика. Принципы кибернетики стали применяться для познания процессов, протекающих в живых организмах, социальных и экономических системах.
Использование принципов и идей кибернетики для получения оптимальных решений при управлении производством и экономикой привело к появлению многочисленных экономико-математических оптимизационных моделей. Варианты планов экономического развития, полученные на основе построения таких моделей, как правило, оказывались лучше интуитивных. Схемы рационального размещения производительных сил, соответствующие оптимальным решениям, обеспечивают существенную экономию затрат, более эффективное использование имеющихся ресурсов.
Особенностью оптимизационных моделей является целенаправленность решения и явная оценка эффективности (качества) различных вариантов решения. В отличие от моделей без управления оптимизационные модели предполагают выявление цели управления и построение целевой функции. Целевая функция, как упоминалось 
 ранее, задает желаемые значения определенных параметров (свойств, выходов) системы или процесса, выраженные в математической форме.
ранее, задает желаемые значения определенных параметров (свойств, выходов) системы или процесса, выраженные в математической форме.
Суть получения оптимального решения на модели заключается в следующем. Допустим, что известна цель управления (целевая функция), она может быть достигнута при разных значениях параметров данного объекта или различных вариантах решения и имеется возможность оценить эффективность (степень достижения цели) каждого варианта. Тогда получение оптимального решения означает выбор из множества возможных решений одного, обеспечивающего максимальную эффективность.
|
|
|
