 |


Метрический и кинематический синтез и анализ исполнительного механизма
|
|
|
|
РАСЧЁТ ОСНОВНЫХ ПАРАМЕТРОВ ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА
ЖЕЛЕЗНОДОРОЖНОЙ МАШИНЫ С РЫЧАЖНО-ПОЛЗУННЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОМУ ПРОЕКТУ (РАБОТЕ)
ПО ДИСЦИПЛИНЕ “ТЕОРИЯ МЕХАНИЗМОВ МАШИН”
ПЖМ – 1 – 00 – 00 ПЗ
Выполнил: студент группы ЛТ-001 Зайцев В.О.
Руководил: профессор Сухих Р.Д.
Санкт-Петербург
2012г.
СОДЕРЖАНИЕ
Введение………………………………….………………………………
Задание на курсовой проект…………………………………………….
1. Структурный анализ и синтез исполнительного механизма………
2. Метрический и кинематический синтез и анализ исполнителя
механизма…………………………………………………………..………
3. Подбор электродвигателя и типа редуктора……………………….
4. Расчёт зубчатой передачи редуктора………………………………
5. Кинет статический и динамический анализ и синтез…………….
Заключение………………………………………………………………
Список используемой литературы………………………..……………
ВВЕДЕНИЕ
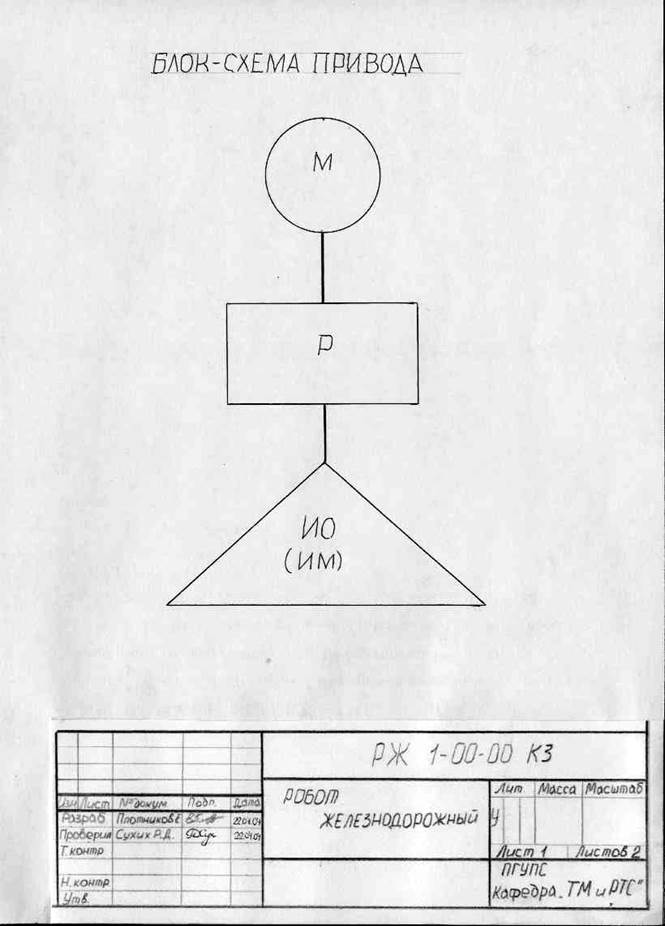
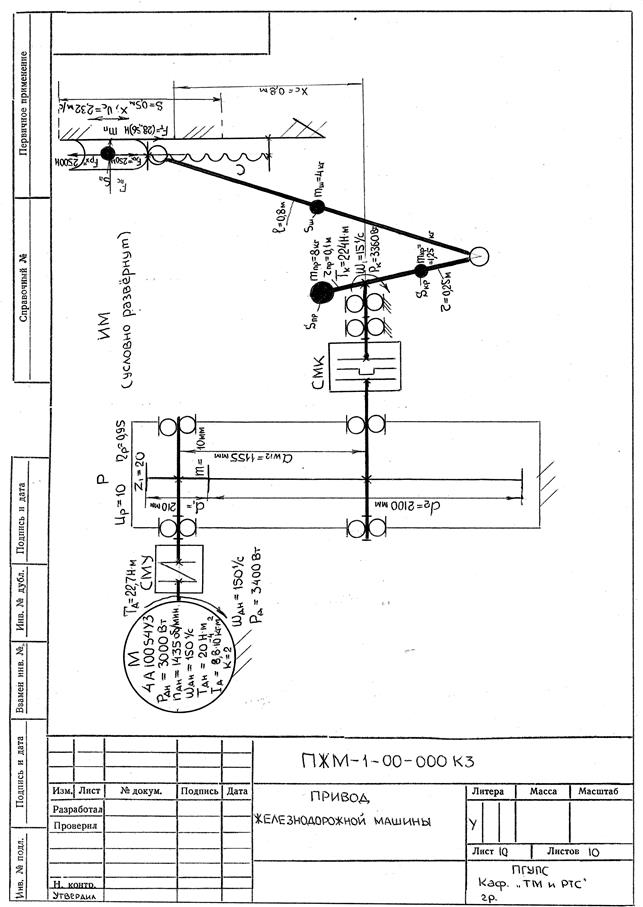
Проектируемый привод железнодорожной машины включает в себя электродвигатель переменного тока (асинхронный) с синхронной частотой вращения nо = 3000 об/мин. Его вал упругой соединительной муфтой типа МУВП соединён со входным валом зубчатого планетарного редуктора. Выходной вал последнего компенсирующей муфтой соединён с кривошипом рычажно-ползунного исполнительного механизма. Выходное звено последнего скреплено с исполнительным органом, взаимодействующим с объектом окружающей среды и выполняющим требуемую работу. Весь привод размещён на несущей конструкции, в частности, раме. Привод снабжён также устройствами управления и системами безопасности и удобства работы.
|
|
|
Блок – схема привода приведена на чертеже, где Р. – редуктор, ИМ − исполнительный механизм с исполнительным органом ИО.
При курсовом проекте необходимо:
подобрать электродвигатель;
найти размеры исполнительного механизма;
подобрать редуктор и определить его основные характеристики;
предусмотреть меры по повышению плавности и снижению
виброактивности машины.
ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТ
Выполнить анализ и синтез механизмов привода железнодорожной машины. Исходные данные:
вид механизма: вввп;
ход выходного звена: S = 0, 24 м;
средняя скорость выходного звена: v С = 6,2 м/с;
средняя сила сопротивления перемещению выходного звена:
на участке рабочего хода: F px = 500 Н.
на участке рабочего хода: F хx = 50 Н.
допустимый коэффициент неравномерности вращения (б) = 0, 5.
модуль зубчатых зацеплений: м = 2 мм.
погонная масса рычагов q = 5 кг\м.
масса ползунов mп = 3 кг.
СТРУКТУРНЫЙ АНАЛИЗ И СИНТЕЗ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА
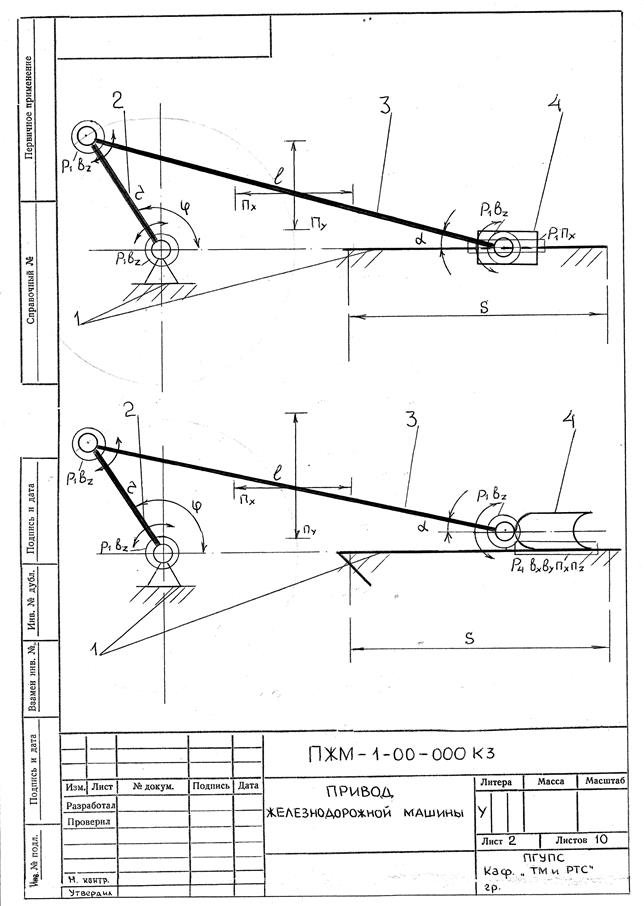
1.1 Исполнительный рычажно-ползунный механизм, заданный
последовательностью вввп трёх вращательных и одной поступательной кинематической пары, представляет собой кривошипно-ползунным
механизм, представленный на чертеже. Он состоит из четырёх звеньев(n = 4): стойки 1, кривошипа 2, шатуна 3 и ползуна 4. Эти звенья входят друг с другом в p 1 = 4 одноподвижные кинематические пары: 1-2 – вращательная; 2-3 – вращательная; 3-4 – вращательная и 4-1 – поступательная. Подвижных звеньев (n – 1) = 3: 2, 3 и 4, неподвижных 1. Неизменяемый, замкнутый на стойку контур звеньев в этом механизме имеется один: К = p 1 – (n – 1) = 4 – 3 = 1. Вращательные пары реализуют в механизме смещения звеньев В Z, ползун – смещение П X, срединные точки шатуна имеют составляющую смещения П Y. Всего смещений три, поэтому механизм относится к третьему семейству (N = 3). Подвижность механизма W = N (n – 1) − (N – 1) p 1 = 3∙3 – (3 – 1)∙4 = 9 – 8 = 1. Избыточных связей в сопряжениях звеньев имеется q = 6 – N = 6 – 3 = 3 – это необходимость для нормальной работы выполнять оси всех вращательных пар параллельными, не перекошенными относительно плоскости движения звеньев, а все звенья располагать так, чтобы они перемещались в параллельных плоскостях.
|
|
|
1.2. Для хорошей работы избыточные связи следует устранять, выполняя кинематические пары так, чтобы сумма подвижностей их была равна 7 и имела все 6 реализованных или возможных движений. Этому условию отвечает механизм с последовательностью пар в1в1в1п4 (см. рис. на чертеже), или в1в2в2п2 , или в1в2в3п1. Такие механизмы при наличии у них возможности разворачиваться и смещаться по трём координатным осям будут статически определимым.
МЕТРИЧЕСКИЙ И КИНЕМАТИЧЕСКИЙ СИНТЕЗ И АНАЛИЗ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА
2.1 Длина кривошипа равна половине хода ползуна:
r = S /2 = 0, 24/2 = 0, 12 м.
Длину шатуна l находим, ограничивая угол передачи давления αmax= [α] = 30  :
:
l = r /tag [α] =0, 12/tag 300 = 0, 12/ 0, 3 = 0, 4 м.
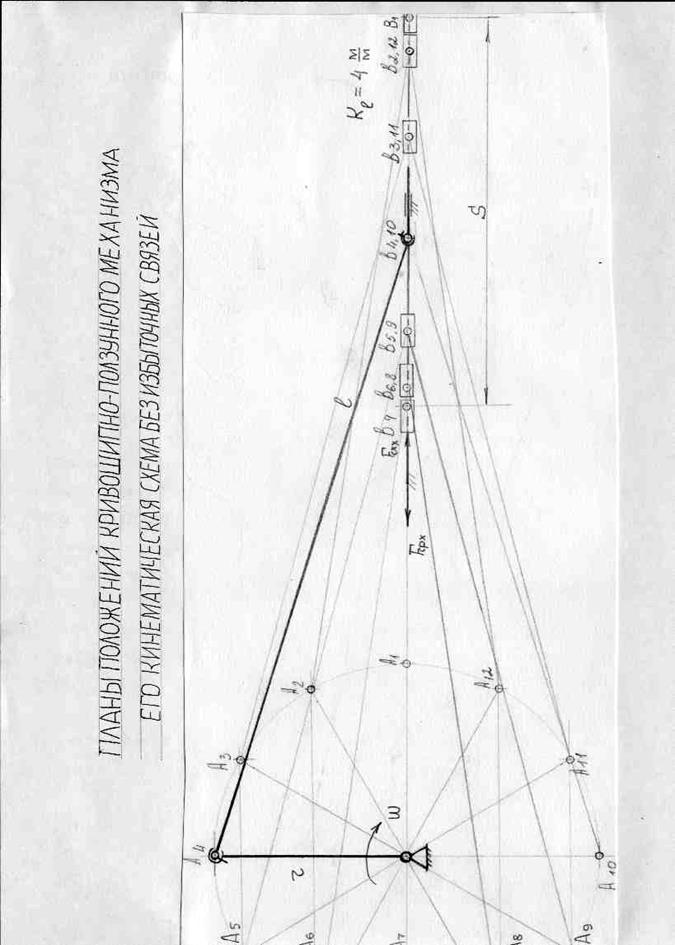
2.2Планы положений механизма в масштабе К l = 4 мм/мм представлены на чертеже. Здесь механизм (его кинематические схемы) при неизменном положении вершин стоек изображён при двух горизонтальных и двух вертикальных положениях кривошипа, при угле поворота кривошипа φ1, равном [α] и 1800 + [α] и ещё в шести промежуточных положениях кривошипа. При расположении кривошипа и шатуна на одной прямой линии ползун находится в крайних положениях, расстояние между которыми S = 0, 24 м.
2.3 Продолжительность одного оборота кривошипа
T Ц = 2 S/v С = 2∙0, 24/ 6, 2 ≈ 0, 0774 с.
2.4 Угловая скорость (средняя) вращения кривошипа
ω1 = 2π/ T ≈ 2∙3,14/0, 0774 ≈ 81,78 (1/с).
Функция положения ползуна
x = r cos φ1 + [ l2 – (r sin φ1)2],
где x – расстояние от оси поворота кривошипа до центра шарнира на
ползуне;
функция скорости ползуна
v = r ω1 [  φ1 + (r/ 2 l) sin 2 φ1],
φ1 + (r/ 2 l) sin 2 φ1],
где ω1 − угловая скорость кривошипа;
φ1 − угол поворота входного кривошипа, отсчитываемый от
горизонтальной оси по часовой стрелке, φ1 = ω1 t.
Значение вычисленных скоростей при r ω1 ≈ 9, 8136 м/с, r/ 2 l =0,15:
| φ1, град | ||||||||||||
| sin φ1 | 0,5 | 0,9 | 0,9 | 0,5 | − 0,5 | −0,9 | − 1 | -0,9 | −0,5 | |||
| sin 2φ1 | 0,9 | 0,9 | −0,9 | 0,9 | − 0,9 | 0,9 | -0,9 | −0,9 | ||||
| 0,15 sin 2 φ1 | 0,13 | 0,135 | −0,1 | 0,135 | − 0,13 | 0,13 | - 0,135 | −0,1 | ||||
| φ1 + 0,15 sin 2 φ1
| 0,63 | 0,97 | 0,76 | 0,635 | − 0,63 | −0,7 | − 1 | −1 | −0,6 | |||
| v, м/с | 6,2 | 9,5 | 9,8 | 7,5 | 6,2 | 6,18 | −7.5 | 9,8 | −9,5 | −6,2 |
|
|
|
График изменения скорости в функции от угла поворота представлен на чертеже.
Находим средние скорости ползуна:
при рабочем ходе v СРХ =  i = 6,53 м/с;
i = 6,53 м/с;
при холостом ходе v СХХ = i = − 6,53 м/с.
Эти скорости при прямом и обратном ходе одинаковые, совпадают с заданной скоростью и представлены в виде графика vC = f (φ1) на чертеже.

 2. ПОДБОР ЭЛЕКТРОДВИГАТЕЛЯ И ТИПА РЕДУКТОРА
2. ПОДБОР ЭЛЕКТРОДВИГАТЕЛЯ И ТИПА РЕДУКТОРА
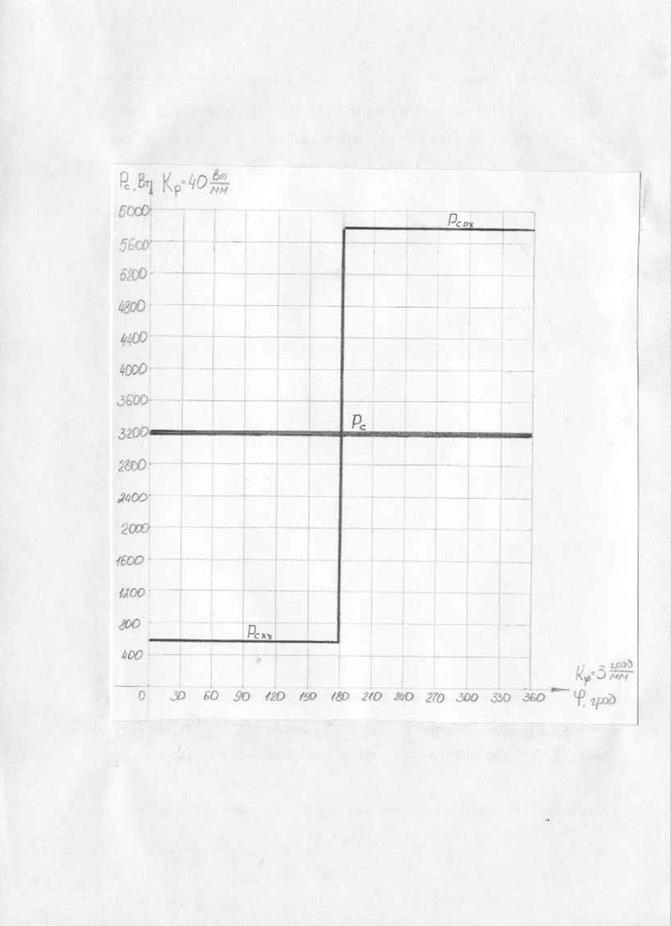
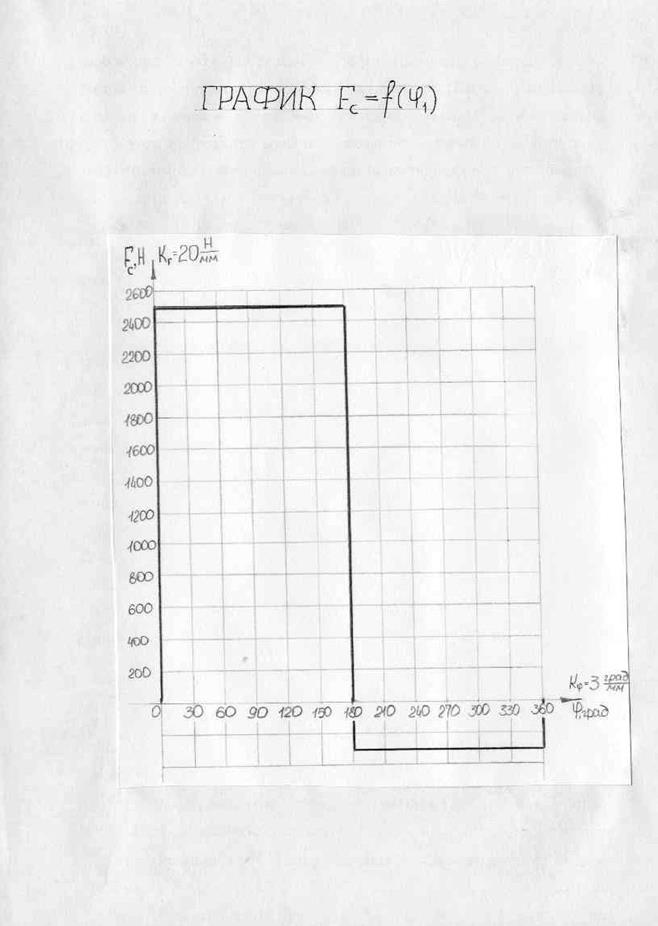
2.1 График изменения силы полезного сопротивления в функции от угла поворота φ1 кривошипа представлен на чертеже.Мощности сил полезного сопротивления перемещению исполнительного органа
на участке рабочего хода:
P cpx = Fcpx vсрx = 500*6,53 = 3265 Вт;
на участке холостого хода:
P cxx = Fcxx vcxx = 50*6,53 = 326,5 Вт.
Среднее значение силы полезного сопротивления F СР = (500 + 50)/2 =275 Н.
2.2 Средняя мощность силы полезного сопротивления:
P c = 0,5(Pcpx + Pcxx) = 0,5(3265 + 326,5) = 1795,75 Вт.
2.3 Коэффициент полезного действия исполнительного механизма с четырьмя кинематическими парами (вращательных – качения, поступательной – скольжения) примем равным ηМ ≈ 0,99∙0,99∙0,99∙0,98 ≈ 0,95. Среднее значение мощности сил сопротивления вращению кривошипа
P К = P C/ ηМ = 1795,75/0,95 ≈ 1890,26 Вт.
Среднее значение момента сил сопротивления вращению кривошипа
T К = P C/ ω1 = 1795,75/81,78 ≈ 21,96 (Н∙м).
Графики изменения мощностей сил полезного сопротивления в функции от угла поворота кривошипа представлены на чертеже.
2.4 В случае использования высокооборотного (ωДО = 314 1/с), среднеоборотного (ωДО = 157 1/с) и низкооборотного (ωДО ≈ 105 1/с) электродвигателя его скорость при передаче вращения на кривошип, вращающийся со скоростью 81,78 1/с необходимо уменьшить в u 10 = 314/81,78 ≈ 4, в u 20 = 157/81,78 ≈ 2 и в u 30 = 105/15 ≈ 1,3 раз – это ориентировочное значение передаточного числа механизма-передачи, которое необходимо разместить между двигателем и кривошипом.
|
|
|
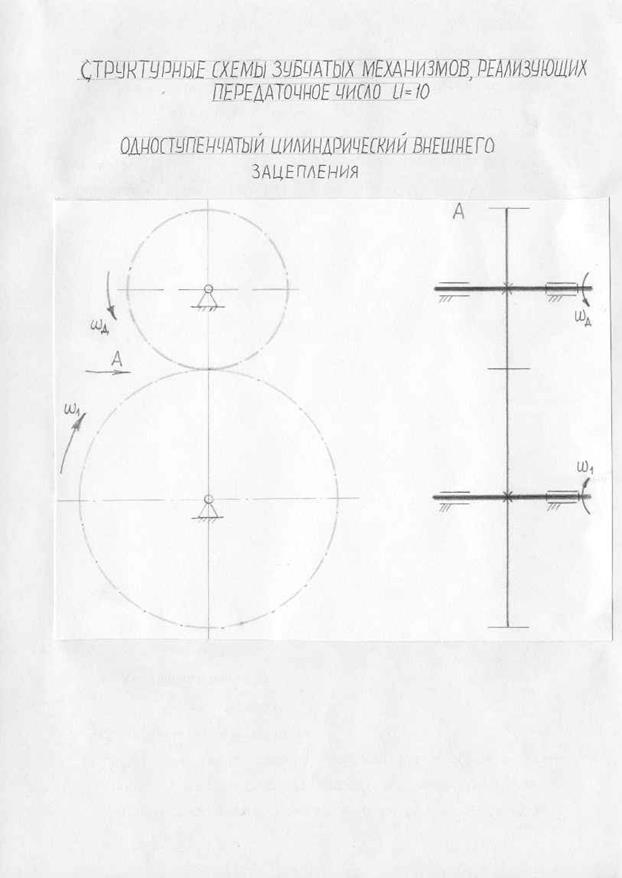
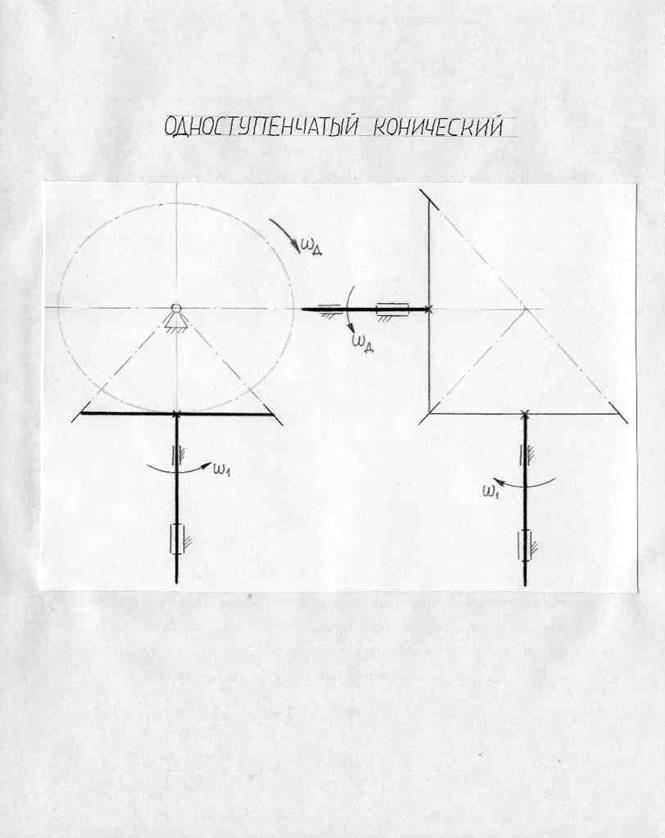
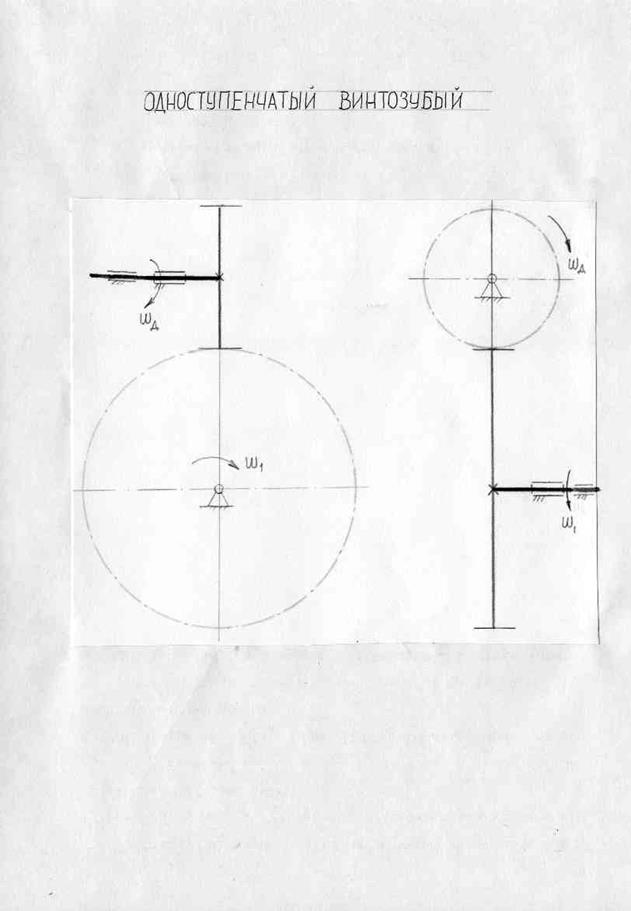
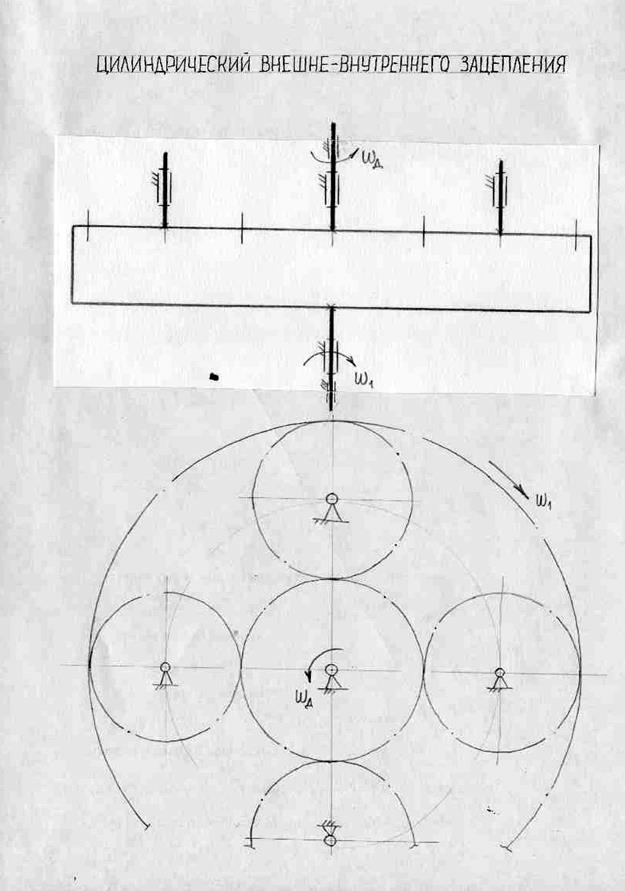
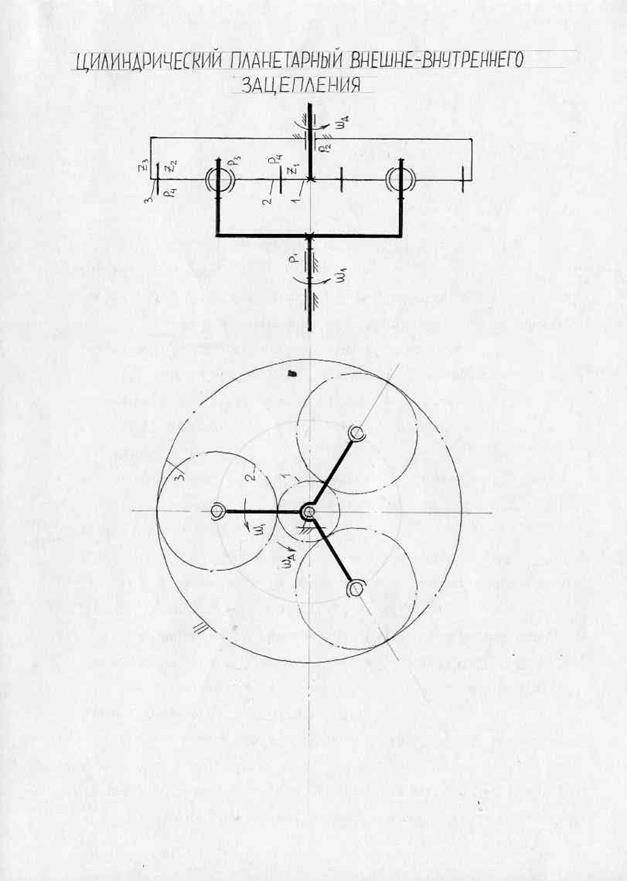
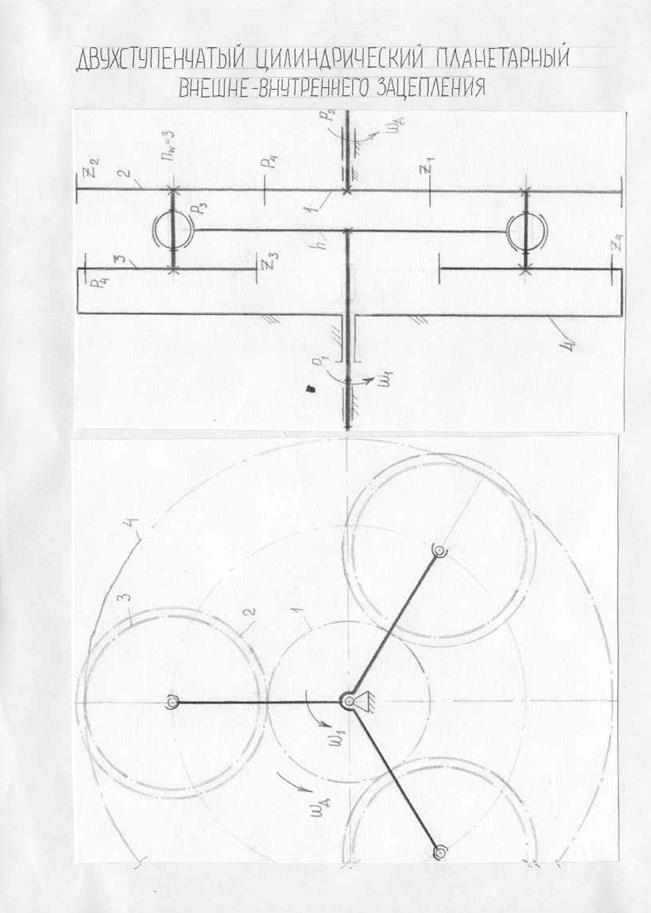
2.5 Возможные выполнения и компоновки зубчатых передач (редукторов), реализующих найденные передаточные числа:
при u ≈ 7…10 одноступенчатый цилиндрический внешнего зацепления; то же, внутреннего; то же, конический; то же, винтозубчатый; цилиндрический внешне-внутреннего зацепления; цилиндрический
2.7 Максимально возможный коэффициент полезного действия одноступенчатого зубчатого цилиндрического редуктора ηР ≈ 0,97. При этом необходимая мощность двигателя составит величину:
P Д = P К/ ηР = 1890,26 /0,97 ≈ 1948,72 Вт.
2.8 По каталогу выбираем среднеоборотный электродвигатель переменного тока трёхфазный асинхронный единой серии А с двумя парами полюсов с ближайшей к Р д мощностью:
марка 4А80B2У3;
номинальная мощность Р ДН = 2200 Вт (перегрузка не превышает допустимых 12,5 %);
номинальная частота вращения n ДН = 2850 об/мин, угловая скорость ωДН = π n ДН/30 ≈ 298,45 (1/с);
маховый момент ротора GD 2 = 35·10-4 кгс·м2; момент инерции массы I Д ≈ 8,8 ·10-4 кг·м2;
кратность пускового момента К = Т П/ Т ДН =2.1
2.9 Уточнённое значение передаточного числа редуктора:
u Р = ωДН/ω1 = 298,45/81,78 = 3,65.
2.10 Необходимый движущий момент:
T Д = P Д / ωДН = 1948,72 /298,45≈ 6,53.
Отношение T К/ T Д ≈ 13,69/3,65 ≈ 2,097 должно равняться произведению u Р на ηР, равному ≈ 3,65∙0,97 = 2,1, что, практически, и имеет место.
ЗАКЛЮЧЕНИЕ
Таким образом, спроектирован привод железнодорожной машины, включающий электродвигатель М, вал ротора которого соединён упругой муфтой СМУ со входным валом зубчатого одноступенчатого редуктора внешнего зацепления. Выходной вал этого редуктора компенсирующей муфтой СМК соединён с валом кривошипа четырёхзвенного кривошипно-ползунного исполнительного механизма ИМ с исполнительным органом ИО на ползуне. Выходное звено его подпружинено пружиной разгружателя, а кривошип и шатун уравновешены, обеспечивая требуемую плавность движения.
Структурная схема спроектированной машины представлена на чертеже.
Подпись (Николаев Е.Ю.)
15 марта 2012 г.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
.
1. Сухих Р. Д. Конспект лекций по дисциплине “Теория машин и механизмов”, 2011 − 2012 учебный год.
2. Кожевников С.Н. Теория механизмов и машин. – Москва: Машиностроение, 2003
3. Петрович Г.М. Виды ползунных механизмов – г. Дагестан
ТП-46 1998 год.
|
|
|
