 |


Электромагнитной муфты скольжения
|
|
|
|
В конструкцию электроприводов ряда рабочих машин входят электромагнитные муфты различных видов[9,13]. Электромагнитная муфта - это силовое электромеханическое устройство позволяющее регулировать частоту вращения исполнительного органа рабочей машины при постоянной частоте вращения двигателя. В некоторых случаях электромагнитные муфты (ЭММ) используются и для регулирования прикладываемого к исполнительному органу момента. Широкое применение в автоматизированном электроприводе нашли следующие виды электромагнитных муфт: фрикционная (контактная и бесконтактная), порошковая и скольжения (асинхронная).
Электромагнитная муфта (рис. 5.20, а) состоит из двух механически не связанных друг с другом частей - ведущей и ведомой. Ведущая часть, называемая якорем 2 и выполняемая из ферромагнитного материала, соединяется с валом двигателя 1 (на рисунке показан асинхронный двигатель). Ведомая часть, называемая индуктором 4, располагается внутри ведущей части и соединяется через редуктор или непосредственно с исполнительным органом 6 рабочей машины. На индукторе 4 располагается обмотка возбуждения 3, которая через контактные кольца 5 подключена к источнику питания. Ток возбуждения  можно регулировать, за счет чего и происходит изменение частоты вращения ведомой части муфты, а следовательно, и исполнительного органа 6. Если обмотка индуктора 4 не обтекается током возбуждения, то между ним и якорем 2отсутствует магнитная связь и индуктор 4 неподвижен (
можно регулировать, за счет чего и происходит изменение частоты вращения ведомой части муфты, а следовательно, и исполнительного органа 6. Если обмотка индуктора 4 не обтекается током возбуждения, то между ним и якорем 2отсутствует магнитная связь и индуктор 4 неподвижен ( = 0).
= 0).
При протекании по обмотке 3тока возбуждения  в воздушном зазоре между якорем и индуктором возникает магнитное поле, под действием которого во вращающемся якоре 2 будут циркулировать вихревые токи. Взаимодействие этих токов с магнитным полем создает вращающий момент, под действием которого индуктор начинает вращаться в ту же сторону с частотой вращения .
в воздушном зазоре между якорем и индуктором возникает магнитное поле, под действием которого во вращающемся якоре 2 будут циркулировать вихревые токи. Взаимодействие этих токов с магнитным полем создает вращающий момент, под действием которого индуктор начинает вращаться в ту же сторону с частотой вращения .
|
|
|
Принцип действия электромагнитной муфты во многом похож на принцип действия асинхронного двигателя, имеющего массивный (сплошной) ротор. По механическим характеристикам муфты  = f(M), представляющим собой зависимости частоты вращения индуктора (ведомой части) от развиваемого им момента
= f(M), представляющим собой зависимости частоты вращения индуктора (ведомой части) от развиваемого им момента  при разных токах возбуждения
при разных токах возбуждения  (см.рис. 5.21, a), видно, что, например, при постоянном моменте на грузки
(см.рис. 5.21, a), видно, что, например, при постоянном моменте на грузки  регулирование тока возбуждения от
регулирование тока возбуждения от  до
до  позволяет изменять частоту вращения индуктора от
позволяет изменять частоту вращения индуктора от  до
до 
Рассмотренная муфта относится к группе электромагнитных муфт со связью между ее частями через магнитное поле. Существуют также муфты с механической связью. В них передача вращающего момента от ведущей части к ведомой осуществляется посредством механического трения или зацепления за счет создания между ними магнитного поля электромагнита с нормальным давлением.
Параметрическое регулирование частоты вращения электропривода с помощью электромагнитной муфты скольжения не может обеспечить необходимой точности и большого диапазона вследствие незначительной жесткости механических характеристик и снижающейся по мере уменьшения тока возбуждения перегрузочной способности муфты. С целью расширения диапазона регулирования частоты вращения и получения высокой точности используется система автоматического регулирования [22].
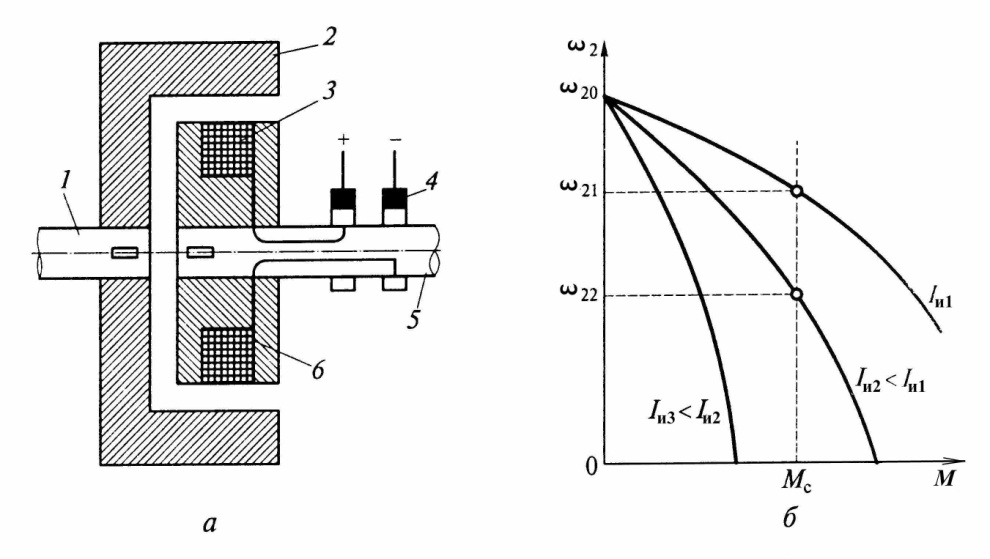
Рис.5.20. Электромагнитная муфта: а – схема устройства;
б – механические характеристики.
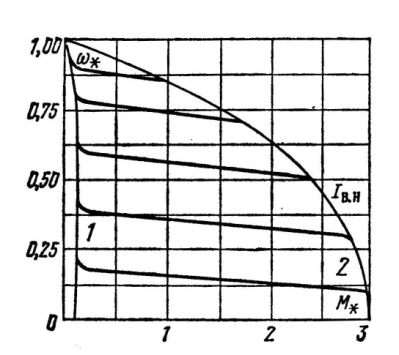
На рис.5.21, б показана принципиальная схема автоматического регулирования частоты вращения электропривода с электромагнитной муфтой скольжения (ЭМС) с отрицательной обратной связью по частоте вращения, осуществляемой при помощи тахогенератора BR, связанного с выходным валом электропривода.
|
|
|

а б
Рис. 5.21. Схема автоматического регулирования частоты вращения асинхронного двигателя с использованием электромагнитной муфты и отрицательной обратной связи по скорости.
Регулятором частоты вращения РЧВ задается напряжение, сравниваемое с сигналом обратной связи; разность этих сигналов подается на усилитель У, выход которого подключается, через щетки и контактные кольца, к обмотке возбуждения ЭМС.
Возможно и бесконтактное исполнение ЭМС, в которой обмотка возбуждения располагается в корпусе муфты неподвижно относительно вращающегося якоря. В таких устройствах в качестве датчика обратной связи по частоте вращения вместо тахогенератора может быть применен электромагнитный импульсный датчик. На рис. 5.21, б приведены примерные механические характеристики ЭМС при автоматическом регулировании с отрицательной обратной связью по частоте вращения. Они расположены между характеристиками, обозначенными цифрами 1 и 2и соответствующими, приблизительно, 0,1 и номинальному токам возбуждения ЭМС при параметрическом
регулировании.
Точность регулирования оказывается высокой, также как и диапазон регулирования, который может составить до (40…50): 1 и зависит от коэффициента усиления системы; с увеличением последнего возрастает допустимый диапазон регулирования.
Потери в ЭМС складываются из потерь в якоре (роторе), обусловленных скольжением и передаваемым моментом; в обмотке возбуждения, в стали ротора, определяемые угловой частотой вращения и механическими потерями.
С увеличением скольжения превалируют потери скольжения; номинальная мощность, затрачиваемая на возбуждение ЭМС общего назначения с номинальным моментом от 75 до 1600 Н  м, составляет в среднем от З до 0,7% максимальной мощности, передаваемой муфтой. В ЭМС специального назначения для передачи больших моментов мощность, затрачиваемая на возбуждение, еще меньше [22].
м, составляет в среднем от З до 0,7% максимальной мощности, передаваемой муфтой. В ЭМС специального назначения для передачи больших моментов мощность, затрачиваемая на возбуждение, еще меньше [22].
Таким образом, КПД. муфты
 (5.50)
(5.50)
где М – момент, передаваемый муфтой; ,  - соответственно угловые скорости выходного вала муфты и приводного двигателя;
- соответственно угловые скорости выходного вала муфты и приводного двигателя;  - мощность затрачиваемая на возбуждение;
- мощность затрачиваемая на возбуждение;  - мощность, обусловленная механическими и вентиляционными потерями.
- мощность, обусловленная механическими и вентиляционными потерями.
При регулировании частоты вращения асинхронного двигателя с постоянным моментом нагрузки, пренебрегая для муфт средней и большой мощности и по сравнению с  , получаем:
, получаем:
|
|
|
 (5.51)
(5.51)
Из (5.51) следует, что с возрастанием скольжения s КПД муфты снижается, развиваемая мощность снижается пропорционально уменьшению частоты вращения, а потребляемая муфтой мощность не изменяется.
Таким образом, избыточная мощность рассеивается в виде теплоты в рабочей поверхности якоря муфты. Зависимости потребляемой мощности потерь в якоре муфты полезной мощности и КПД от угловой частоты вращения при неизменном и вентиляторном моментах нагрузки приведены на рис.5.22, а и б. Анализ этих зависимостей указывает на то, что потери мощности в якоре ЭМС, как и следовало ожидать, совпадают с потерями мощности скольжения в роторной цепи асинхронного двигателя при реостатном регулировании, а также при регулировании изменением подводимого напряжения. КПД электропривода с ЭМС равен
 (5.52)
(5.52)
где  - КПД приводного асинхронного двигателя.
- КПД приводного асинхронного двигателя.
Так как КПД асинхронного двигателя является функцией, развиваемой мощности, то со снижением частоты вращения выходного вала ЭМС КПД электропривода будет еще более резко падать, чем на характеристиках рис. 5.22.
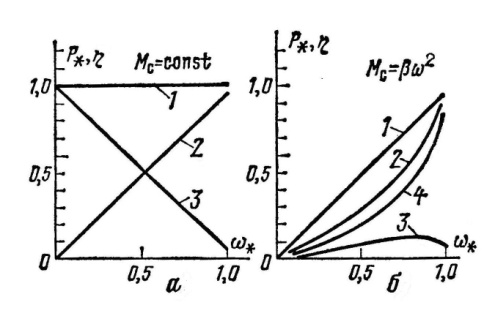
Рис.5.22. Зависимость мощностей и КПД от угловой скорости: а –при постоянном моменте нагрузки (M = const); б –при вентиляторном моменте нагрузки; 1- потребляемая мощность; 2- полезная мощность;
3 – потери в якоре муфты; 4 – КПД.
Коэффициент мощности электропривода с ЭМС зависит только от передаваемого момента и определяется коэффициентом мощности асинхронного двигателя. Если регулирование частоты вращения происходит с постоянным моментом, равным номинальному, то коэффициент мощности поддерживается номинальным независимо от скольжения ЭМС. При вентиляторной нагрузке коэффициент мощности зависит от скольжения ЭМС и заметно снижается со снижением астоты вращения.
Вследствие значительных потерь мощности в якоре ЭМС находят применение в приводах небольшой мощности (примерно до 20 кВт), регулируемых с постоянным моментом и работающих в повторно-кратковременном и кратковременном режимах. В случае вентиляторной нагрузки пределы регулирования, как и используемая мощность привода, могут быть значительно расширены.
Электропривод с электромагнитной муфтой скольжения привлекает своей простотой, высокой плавностью регулирования и малой мощностью преобразовательного устройства для намагничивания муфты. Применение электромагнитных муфт позволяет в ряде случаев упростить автоматизацию технологических процессов и регулирование скорости движения исполнительных органов рабочих машин.
|
|
|
|
|
|
