 |


Момент инерции и энергия вращающегося тела
|
|
|
|
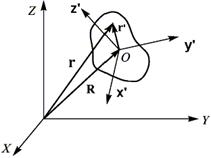
Для описания движения твердого тела используем две системы координат. Одну неподвижную инерциальную систему X,Y,Z, а другую – движущуюся, x', y', z', жестко связанную с твердым телом, рис. 5. Начало координат движущейся системы координат удобно совместить с центром масс тела. Теперь положение движущейся системы координат определяет положение тела в неподвижной системе координат.
|
Рис. 5. Твердое тело и две системы координат, определяющие его положение в пространстве | |||||
|
Радиус-вектор R указывает положение начала 0 движущейся системы координат. Ориентация осей этой системы x ', y ', z ' относительно неподвижной определяется тремя независимыми углами. В итоге вместе с тремя компонентами вектора R мы имеем шесть координат. Таким образом, всякое твердое тело представляет собой механическую систему с шестью степенями свободы. Рассмотрим бесконечно малое перемещение твердого тела. Такое перемещение можно представить в виде суммы двух составляющих. Одна из них – это бесконечно малый параллельный перенос тела, когда все его точки смещаются одинаково, центр масс (начало координат подвижной системы) переходит из начального положения в конечное. Ориентация осей подвижной системы координат остается неизменной. Вторая составляющая движения – бесконечно малый поворот вокруг центра масс, в результате которого твердое тело переходит в конечное положение. Очевидно, что порядок этих двух операций не важен. Радиус-вектор произвольной точки твердого тела в подвижной системе координат обозначим r ', а радиус-вектор той же точки в неподвижной системе – r. Тогда бесконечно малое смещение d r точки складывается из перемещения d R центра масс и перемещения [ d φ r ] тела относительно центра масс при повороте на бесконечно малый угол d φ вокруг точки 0:
d r = d R + [ d φr ]. | |||||
Разделив это равенство на интервал времени dt, в течение которого произошло перемещение, и обозначив скорости
| dr / dt = v, dR / dt = V, dφ / dt = ω, |
получим соотношение между ними
| v = V + [ω r ]. |
Вектор V – это скорость движения центра масс твердого тела. Ее называют также скоростью поступательного движения твердого тела. Вектор ω называется угловой скоростью вращения твердого тела. Его направление и направление вектора углового перемещения d φ совпадают с направлением оси вращения в данный момент времени. Таким образом, скорость v любой точки тела (относительно неподвижной системы координат) может быть выражена через поступательную скорость тела V и угловую скорость его вращения ω.
В неподвижной лабораторной системе отсчета полная кинетическая энергия механической системы равна сумме кинетической энергии, измеренной в системе центра масс, и кинетической энергии центра масс, определяемой из соотношения
 .
.
Здесь m – полная масса системы, а  – скорость ее центра масс в лабораторной системе отсчета. В системе центра масс твердое тело может обладать лишь вращательной кинетической энергией.
– скорость ее центра масс в лабораторной системе отсчета. В системе центра масс твердое тело может обладать лишь вращательной кинетической энергией.
При вращении твердого тела относительно неподвижной оси все его точки с массами m i описывают окружности различных радиусов ri, обладая при этом различными линейными скоростями vi. Однако угловая скорость ω у всех этих точек одинакова. Кинетическую энергию вращающегося тела можно найти как сумму энергий его элементарных составных частей.
W квр. = (m 1 v 12/2)+ (m 2 v 22/2)+ (m 3 v 32/2)+…..
Поскольку m 1= m 2= m 3 = m i, a v i = r i ω, то оказывается, что
W квр. = (ω 2/2)·[(m 1 r 12)+ (m 2 r 22)+ (m 3 r 32)+…..].
Сумма произведений масс элементарных частей тела на квадраты их расстояний до определенной оси называется моментом инерции тела относительно этой оси:
|
|
|
J = (m 1 r 12)+ (m 2 r 22)+ (m 3 r 32)+….
Более точно следует записать: J = ∫ r 2· dm. Интегрирование производится по всему объему тела. Момент инерции является скалярной величиной и измеряется в кг·м2. Теперь выражение для кинетической энергии можно записать как
W квр. = Jω 2/2.
Момент инерции тела зависит от распределения массы, размеров и формы тела. Для тел правильной геометрической формы момент инерции относительно осей симметрии легко вычисляется по формулам, которые приводятся ниже.
Момент инерции материальной точки массой m, расположенной на расстоянии а от оси, определяется соотношением:
J = ma 2.
Момент инерции кольца (однородного тонкого обруча, тонкостенного цилиндра) массой m относительно оси симметрии, проходящей через центр масс перпендикулярно плоскости кольца, определяется соотношением:
J = mR 2,
где R – радиус кольца.
Момент инерции сплошного диска (однородного сплошного цилиндра) массой m относительно оси симметрии, проходящей через центр масс перпендикулярно плоскости диска, определяется соотношением:
J = mR 2/2,
где R – радиус диска.
Момент инерции однородного шара массой m относительно оси, проходящей через его центр, определяется соотношением:
J = (2/5) mR 2,
где R – радиус шара.
Момент инерции однородного стержня массой m относительно оси, проходящей через середину стержня перпендикулярно его длине,
J = ml 2/12,
где l – длина стержня.
Очень часто при решении задач требуется знать момент инерции относительно оси, не проходящей через центр масс тела. В ряде случаев его нахождение не представляет серьезных трудностей. Для однородного тела массой m, если известен момент инерции J o относительно оси, проходящей через центр масс, но необходимо найти момент инерции J относительно параллельной ей оси, расположенной на расстоянии d, можно воспользоваться теоремой Гюйгенса – Штейнера:
J = J o + md 2.
|
|
|
