 |


Индуктивные приборы для линейных измерений в машиностроении
|
|
|
|
Расчет индуктивных преобразователей для линейных измерений
Методические указания
к расчетно-графическому заданию по дисциплине «Преобразующие устройства приборов»
для студентов дневной и заочной форм обучения специальности
7.090901 – «Приборы точной механики»
Севастополь
УДК 621.9.08
Расчёт индуктивных преобразователей для линейных измерений: Методические указания к расчётно-графическому заданию по дисциплине «Преобразующие устройства приборов» /Разраб. В.Я. Копп, А.П. Васютенко, Д.В. Заморёнова, Л.В. Недобой. – Севастополь: Изд-во СевНТУ, 2007. – 28с.
Целью методических указаний является изучение студентами методик и приобретение практических навыков расчёта различных типов индуктивных преобразователей для линейных измерений.
Методические указания предназначены для студентов дневной и заочной форм обучения специальности 7.090901. «Приборы точной механики».
Методические указания рассмотрены и утверждены на заседании кафедры «Автоматизированные приборные системы» (протокол №8 от 28.02 2007 г.).
Допущено учебно-методическим центром СевНТУ в качестве методических указаний.
Рецензент: Л.А. Глеч, канд. техн. наук, доцент кафедры «Автоматизированные приборные системы».
содержание
1. Цель работы………………………………………………………………………….4
2. Теоретический раздел……………………………………………………………….4
2.1. Индуктивные приборы для линейных измерений
в машиностроении…………………………………………………….…………….4
2.2. Индуктивные преобразователи……………………………….……………….6
3. Порядок выполнения расчётов……………………………………………………...9
3.1. Методика расчёта индуктивных преобразователей…………….…………....9
|
|
|
3.2. Порядок расчёта индуктивного преобразователя с П-образным
и Ш-образным сердечником и плоским якорем…………………………………12
3.3. Порядок расчёта индуктивного преобразователя с цилиндрическим
сердечником и плоским якорем…………………………………………………..22
4. Индивидуальные расчетно-практические задания……………………………….27
5. Содержание отчёта…………………………………………………………………27
6. Контрольные вопросы………………………………………………………….…..28
Библиографический список…………………………………………………………..28
1. цель работы
1.1 Углубленное изучение студентами принципов, методов и средств преобразования сигналов в индуктивных измерительных преобразователях.
1.2 Освоение методик выбора параметров индуктивных преобразователей для линейных измерений и расчёта преобразователей с П-образным и Ш-образным сердечником и плоским якорем, а также преобразователей с цилиндрическим сердечником и плоским якорем.
Теоретический раздел
Индуктивные приборы для линейных измерений в машиностроении
Индуктивные приборы отличается высокой точностью, позволяют вести дистанционные измерения, сравнительно небольшие габариты индуктивных преобразователей позволяют создавать компактные измерительные устройства. Наличие единого источника энергии (электрического тока) является существенным преимуществом перед пневматическими приборами, где требуется питание электрическим током и сжатым воздухом.
В индуктивных приборах используется свойство катушки изменять свое реактивное сопротивление при изменении некоторых её параметров, определяющих величину индуктивности – L.
Дня получения возможно большей индуктивности катушка, как правило, выполняется с магнитопроводом из ферромагнитного материала. Как известно из электротехники сопротивление такой катушки (без учета потерь на гистерезис в вихревые токи) равно:
|
|
|

где R – сопротивление катушки постоянному току, Ом;
 – индуктивное сопротивление, Ом;
– индуктивное сопротивление, Ом;
 – круговая частота питающего напряжения (f0 – частота в герцах);
– круговая частота питающего напряжения (f0 – частота в герцах);
W – количество витков катушки;
RM – магнитное сопротивление магнитной цепи катушки, 1/Гн.
Обычно один из элементов магнитной цепи (рисунок 1, а) выполняется подвижным (якорь) и его положение относительно неподвижной части будет определять величину магнитного сопротивления цепи RM, а, следовательно, и индуктивного сопротивления катушки.
Если связать перемещение якоря с измеряемой линейной величиной d, при постоянных параметрах напряжения питания, возникает функциональная зависимость между d и электрическим сопротивлением Z:
Z=w(d).
Устройство, которое преобразует линейное перемещения в изменения электрического параметра Z с помощью вышеописанной катушки называется индуктивным преобразователем.
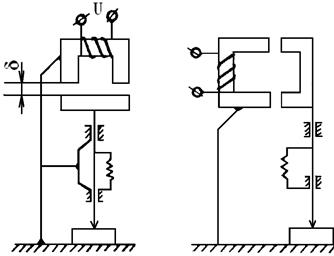
а б
Рисунок 1 – Схемы индуктивных преобразователей дроссельного типа
Индуктивный прибор может быть представлен следующей принципиальной схемой (рисунок 2), где ИП – индуктивный преобразователь, ИС – измерительная схема, служащая дан преобразования сигнала, ИП в удобный для намерений другой электрический параметр (напряжение, сила тока), У – электронный усилитель (если в этом есть необходимость), Ук – указательное устройство, К – устройство для подачи команд, П – источник питания.
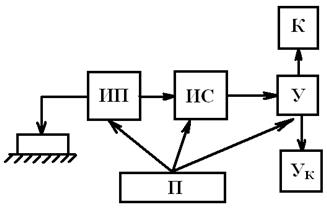
Рисунок 2 – Принципиальная схема индуктивного прибора
Общее передаточное отношение индуктивного прибора KS будет равно:
 , (1)
, (1)
где  – передаточное отношение преобразователя;
– передаточное отношение преобразователя;
 или
или  – передаточное отношение измерительной схемы;
– передаточное отношение измерительной схемы;
Uвс и Iвс – напряжение и ток на выходе схемы;
 – передаточное отношение (коэффициент усиления) усилителя;
– передаточное отношение (коэффициент усиления) усилителя;
U – выходное напряжение усилителя;
 – передаточное отношение указывающего устройства;
– передаточное отношение указывающего устройства;
a – перемещение указателя.
Таким образом
 . (2)
. (2)
При построении индуктивного подбора особо важным является правильный выбор параметров и принципиальной схемы индуктивного преобразователя.
|
|
|
