 |


Вопросы для закрепления. Учебное занятие № 97-98 (2 часа). Реверсоры и групповые переключатели. Контроллеры, задатчики позиций
|
|
|
|
Вопросы для закрепления
1. Назначение пневматического контактора?
2. Номинальное давление подведённого к пневмоприводу воздуха?
3. Отличия пневматического контактора ПК-31А ЭТ от контактора ПК-32А ЭТ?
4. Назначение главных контактов?
5. Конструкция пневмопривода?
6. За счет чего происходит гашение образовавшейся дуги при отключении пневматического контактора?
7. Принцип работы пневматического контактора при включении?
8. Принцип работы пневматического контактора при отключении?
Учебное занятие № 97-98 (2 часа)
Реверсоры и групповые переключатели. Контроллеры, задатчики позиций
Учебные вопросы:
1. Назначение и конструкция токоприемников.
2. Назначение кулачкового тормозного переключателя и реверсора.
3. Назначение и устройство контроллера машиниста.
Учебный вопрос № 1.
Назначение и конструкция токоприемников.
Токоприемник предназначен для снятия электрической энергии с контактного провода, при помощи скользящего контакта, и передачи её к электрическому оборудованию электровоза
Схемный номер: XA1 (XA2).
Место расположения: крыша электровоза.

Рисунок 1. 1
Таблица 2. 5
| Наименование параметра | Значение |
| Номинальное напряжение постоянного тока, кВ: | |
| Номинальный ток, А при движении, на стоянке*: - при температуре воздуха выше плюс 10 °С - при температуре воздуха плюс 10 °С и ниже | |
| Рабочее давление** сжатого воздуха, МПа (кгс/см2) | 0, 30±0, 02 (3, 0±0, 2) |
| Диапазон высоты рабочей зоны контактной поверх- ности полозов поднятого токоприёмника относительно контактной поверхности полозов полностью опущенного токоприёмника, мм | 400 – 1900 |
| Максимальная высота подъёма, мм _____________________ * При двух поднятых токоприёмниках ** Устанавливается по контактному нажатию |
|
|
|
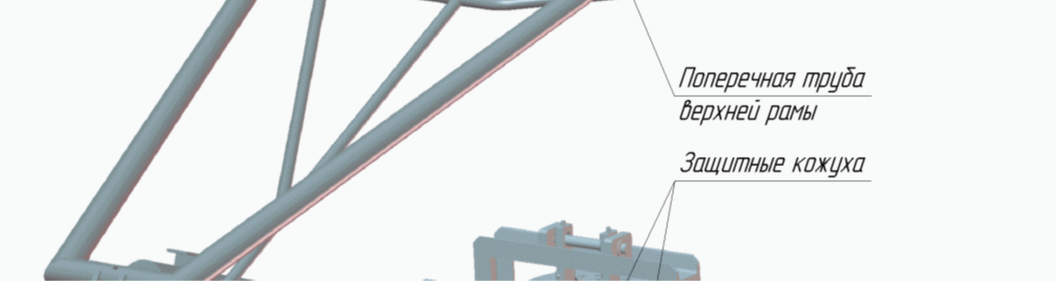
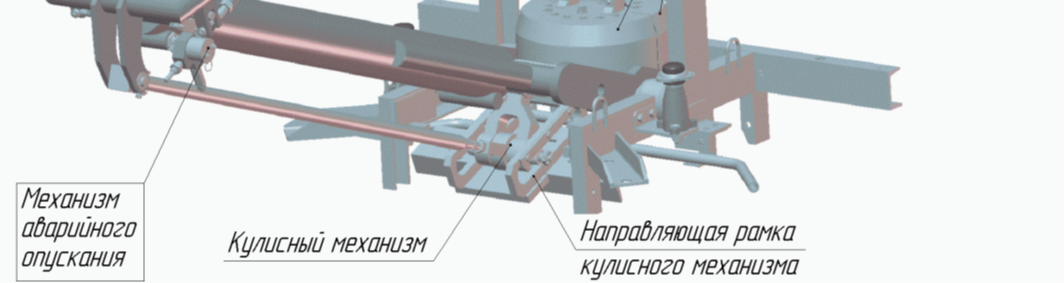
Рисунок 1. 2 – Общий вид токоприёмника со стороны кулисного механизма
Таблица 2. 6 – Контролируемые технические параметры
| Наименование параметра | Значение показателя | Погрешность измерения |
| 1 Статическое нажатие на контактный провод в диапазоне рабочей высоты, Н (кгс) - активное (при подъёме), не менее - пассивное (при опускании), не более | 80 (8, 0) 110 (11, 0) | 2 (0, 2) |
| 2 Разница между наибольшим и наименьшим нажатиями на контактный провод при одностороннем движении токоприёмника (вверх или вниз) в диапазоне рабочей высоты, Н (кгс), | не более 15 (1, 5) | 2 (0, 2) |
| 3 Двойное значение силы трения в шарнирах, приведённое к оси верхнего шарнира, Н (кгс), не более | 25 (2, 5) | 2 (0, 2) |
| 4 Угол поворота полозов с держателями на каретках относительно горизонтальной плоскости, не менее | 5° | 1° |
| 5 Время подъёма полоза токоприёмника из сложенного положения до максимальной рабочей высоты, с | от 7, 0 до 10, 0 | 0, 4 |
| 6 Время опускания полоза токоприёмника с максимальной рабочей высоты в сложенное положение, с | от 3, 5 до 6, 0 | 0, 4 |
.
Токоприёмник ТАсС-16-02, в соответствии с рисунками 2. 6, 2. 7, состоит из следующих основных узлов: основания 1, пневмопривода 2, несущего рычага 3, верхней рамы 4, сочленённой шарнирно с несущим рычагом, как непосредственно, так и через синхронизирующую тягу 7 и нижнюю тягу 5, за счёт перемещения её шарнира в продольном пазу направляющей рамки кулисного механизма; двух кареток 6, подрессоренных пружинами 10 и тягами кареток 11; полозов 9 с пластинами контактными типа ВЖ3П ТУ 32 ЦТ-2041 (далее – контактные пластины), и механизма аварийного опускания (МАО) 12. Подвод воздуха к пневмоприводу осуществляется с помощью трубки с резьбовым соединением G1/2.
|
|
|
Синхронизирующая тяга 7, соединённая с каретками 6 и несущим рычагом 3, в совокупности с верхней рамой 4 образуют шарнирный параллелограмм, стабилизирующий горизонтальное положение полозов 9. Полоза 9 оборудованы контактными пластинами, установленными на медной подложке.
На рисунке 2. 7, изображена кинематическая схема асимметричного токоприёмника ТАсС-16-02 в нормальном режиме работы;
- на рисунке 2. 8 – механизм аварийного опускания токоприёмника в нормальном положении;
- на рисунке 2. 9 – кинематическая схема токоприёмника при ударе полоза о препятствие (недопустимо выступающие части контактной сети при её неисправности); нештатный (аварийный) режим работы токоприёмника;
- на рисунке 2. 10 – механизм аварийного опускания в нештатном режиме работы токоприёмника (рабочее положение механизма аварийного опускания).
На основании 1 установлен пневмопривод 2 с пневмобаллоном резинокордным ТУ У 25. 1-03112610-001, который через шарнир взаимодействует с несущим рычагом 3, имеющим два плеча: короткое 3а, сочленённое с пневмоприводом 2, и длинное, выполненное в виде трубы 14 с двумя отверстиями для входа и выхода сжатого воздуха. На длинном плече шарнирно закреплена верхняя рама 4. Нижняя тяга 5 шарнирно сочленена с основанием 1 и верхней рамой 4.
1 – основание; 2 – пневмопривод; 3 - несущий рычаг; 3а - малое плечо несущего рычага; 4 - верхняя рама; 5 - нижняя тяга; 6 – каретка; 7 - синхронизирующая тяга; 8 – держатель; 9 – полоз; 10 – пружина; 11 - тяги каретки; 12 - механизм аварийного опускания; 13 – ось; 14 - труба несущего рычага; 17 - шток; 33 - тяга кулисы; 34 - шпилька; 35 - резиновый рукав.
Рисунок 1. 3 – Асимметричный токоприёмник ТАсС-16-02 с механизмом аварийного опускания в нормальном режиме работы
13 – ось; 14 - труба несущего рычага; 15 – шарнир; 16 – корпус; 17 – шток; 18, 18а – шарик; 19 – ось; 20 - двуплечий рычаг; 21 – стержень; 22 – пружина; 23 - запорный клапан; 24 – крышка; 25 - регулировочная пружина; 26 – шпилька; 27 - палец (фиксатор); 28 – пружина; 29 – кольцо; 30 - компенсационная пружина; 31 – хомут; 32 - бобышка; 36 – корпус; 37 – втулка.
|
|
|
Рисунок 2. 8 –Асимметричный токоприёмник с механизмом аварийного опускания в нормальном режиме работы
Рисунок 1. 4 – Асимметричный токоприёмник с механизмом
аварийного опускания при ударе полоза о препятствие на контактном проводе (рабочее положение механизма аварийного опускания)
Рисунок 2. 10 –Асимметричный токоприёмник с механизмом аварийного
опускания при ударе полоза о препятствие на контактном проводе
(рабочее положение механизма аварийного опускания)
Рисунок 1. 5 – Общий вид токоприёмника ТАсС-16-02
Рисунок 1. 6 - Токоприёмник ТАсС-16-02. Вид сверху
Рисунок 1. 7 – Токоприёмник ТАсС-16-02. Вид сбоку
На свободном конце верхней рамы 4 установлены две каретки 6, которые соединены синхронизирующей тягой 7. На них размещены полоза 9, связанные жёстко с держателями 8 кареток 6 и имеющие возможность углового поворота на каретках 6 и вертикального перемещения за счёт пружин 10 и подвижности тяг кареток 11.
Механизм аварийного опускания 12 с осью 13 (чертёж 8ТС. 205. 279) установлен у верха трубы 14 несущего рычага 3. Ось 13 исключает затирания в подшипниках скольжения синхронизирующей тяги (рисунок 2. 8) при возможных перекосах продольной оси синхронизирующей тяги 7 при подъёме и опускании токоприёмника.
МАО 12, в соответствии с рисунком 8. 17 лист 2, имеет подвижный в осевом направлении шток 17 с радиальной канавкой «а» и двумя шариками 18 и 18а (имеющими диаметр 11, 112 и 10, 000 мм соответственно), расположенными в ней под углом 90° друг к другу. Шарик 18, срывной, размещён с возможностью перемещения по штоку и взаимодействует через передаточный узел с запорным клапаном 23, поджатым пружиной 22. Передаточный узел, установленный на корпусе 16 и закрытый крышкой 24, выполнен в виде двуплечего рычага 20, взаимодействующего одним плечом с передвигающимся по штоку шариком 18, а другим – через стержень 21 с запорным клапаном 23. Запорный клапан 23 размещён в бобышке 32 (в которую ввернута ось 13 МАО) несущего рычага 3 перед шарниром 15, находящимся в корпусе 16. Шток 17, выполнен с двумя кольцевыми проточками «б» и «в», расположенными симметрично по отношению установленному на пружине 28 в корпусе 36 пальцу 27.
|
|
|
Узел регулировки состоит из шарика 18а, поджатого пружиной 25, шпильки 26 и втулки 37, вкрученной в корпус 16. Сила срыва шарика 18а при аварийной ситуации регулируется с помощью поджатия пружины 25, которое производится за счёт вкручивания шпильки 26. Эта регулировка позволяет избежать ложных срабатываний МАО при увеличении сопротивления движению со стороны контактного провода.
На штоке 17 размещена компенсационная пружина 30. Для электровоза ЭП2К компенсационная пружина 30 на МАО устанавливается в соответствии с рисунком 1. 1, лист 2. В зависимости от конструкции кареток 6, может быть применён вариант МАО с размещением компенсационной пружины 30 на противоположной от корпуса 16 стороне штока 17.
На выходной магистрали запорного клапана 23 установлен подвижно хомут 31 с двумя отверстиями диаметром 6 мм. Перемещая подвижный хомут 31, за счёт изменения площади выходного отверстия запорного клапана 23 регулируется расход воздуха в атмосферу, и как следствие - время аварийного опускания токоприёмника. Время аварийного опускания должно быть от 2 до 3 с.
|
|
|
