 |


Внимание! Материал для дополнительного изучения к разделу «Электрический привод» металлорежущих станков.
|
|
|
|
ПРИМЕНЕНИЕ СИСТЕМЫ ШИРОТНО-
ИМПУЛЬСНЫЙ ПРЕОБРАЗОВАТЕЛЬ – ДВИГАТЕЛЬ
В приводах рабочих движений МРС на основе требований к управляемым источникам питания для управления электродвигателями применяется система широтно-импульсный преобразователь – двигатель. Автоматизированные электроприводы (АЭП), в особенности
электроприводы (ЭП) с полупроводниковыми преобразователями,
используются во многих отраслях народного хозяйства: в машино-
строении, металлургии, станкостроении, химической промышлен-
ности, робототехнике, самолетостроении, космической технике и
др. Технические средства, используемые при создании АЭП с по-
лупроводниковыми преобразователями, непрерывно совершенст-
вуются, а технико-экономические требования, предъявляемые к
таким электроприводам, все более повышаются. Одним из наибо-
лее перспективных направлений в создании высококачественных и
надежных автоматизированных электроприводов в станкостроении явилось широкое применение в них микропроцессоров, мик-ро-ЭВМ, элементов и устройств цифровой техники. Указанному направлению в развитии АЭП в значительной мере отвечают электроприводы с силовыми транзисторными преобразователями.
Как известно, подобные электроприводы отлича-
ются весьма существенными достоинствами, в частности высокими
энергетическими показателями – КПД и коэффициентом мощно-
сти, малыми габаритами и массой, стабильностью характеристик и
их слабой зависимостью от параметров силовых транзисторов, ра-
ботающих в ключевом режиме, высоким быстродействием, воз-
можностью оптимизации параметров электроприводов с помощью
микропроцессоров и микро-ЭВМ. Силовые транзисторные преоб-
|
|
|
разователи позволяют строить как нереверсивные, так и реверсив-
ные электроприводы постоянного и переменного тока.
В современной технике можно выделить различные пути по-
строения электроприводов. В частности, реализацию специализи-
рованных вычислительных устройств и цифровых корректирую-
щих устройств электроприводов возможно осуществить либо на
микропроцессорах, либо на интегральных микросхемах средней и
малой степени интеграции. Выбор той или иной конкретной струк-
туры электропривода и, соответственно, схемной реализации спе-
циализированного вычислительного устройства определяется,
прежде всего, сложностью алгоритмов работы и способами связи
электропривода с управляющей ЭВМ.
Полупроводниковые преобразователи электроприводов по-
стоянного и переменного тока должны удовлетворять следующим
основным требованиям двусторонней проводимости энергии меж-
ду источником питания и исполнительным двигателем для обеспе-
чения его работы во всех квадрантах механической характеристи-
ки; малого и не зависящего от тока выходного сопротивления для
получения механических характеристик, близких к естественным,
и в конечном счете для получения хороших статических и динами-
ческих характеристик электропривода в целом; жесткой внешней
характеристики; малой инерционности; высокого КПД; достаточ-
ной перегрузочной способности для обеспечения необходимых
форсировок в переходных режимах работы привода; высокой по-
мехозащищенности; надежности; приемлемых массогабаритных
показателях; отсутствия влияния на сеть.
Перечисленным основным требованиям в наибольшей степе-
ни удовлетворяют транзисторные преобразователи, работающие в
режиме переключения и питающиеся от источника постоянного
напряжения. Такие преобразователи в электроприводах постоянно-
|
|
|
го тока получили название широтно-импульсных (ШИП).
Важным техническим показателем ШИП-Д являются высокое
быстродействие при отработке управляющих и возмущающих воз-
действий.
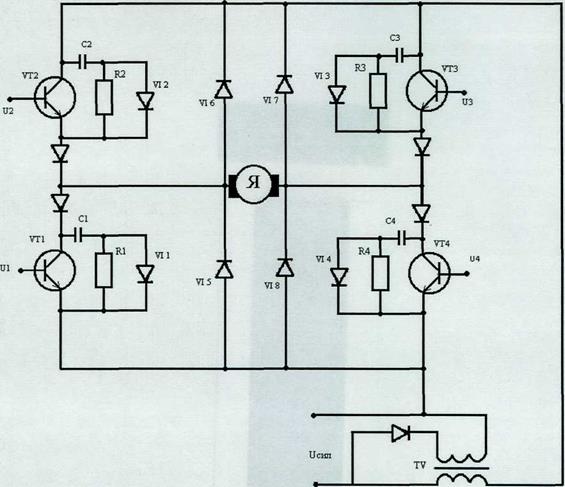
Рис. 1. Электрическая схема силового блока транзисторного ШИП.

Рис. 2 Функциональная схема транзисторного ШИП.
1-Усилитель рассогласования контура скорости.
2-Блок токоограничения.
3-Усилитель контура тока.
4-ШИМ-модулятор.
5-Оптронная развязка.
6-Силовой блок.
7-Блок адаптации.
8-Источник питания.
9-Устройство защиты от высоких напряжений.
10-Датчик тока с гальванической развязкой.
11-Блок изменения токовой отсечки.
Более высокое быстродействие ШИП-Д при отработке управляющих воздействий позволяет достигнуть увеличения скорости обработки по контуру при заданной точности. В ШИП-Д удается увеличить быстродействие под нагрузкой на самых низких скоростях перемещений, а также увеличить точность и сократить время позиционирования, вследствие чего система ШИП-Д используются в механизмах подач станков с программным управлением и в роботах со сложными законами управления перемещений. Поэтому применение ШИП-Д с более высокой частотой коммутации позволяет сократить потери в двигателях и габариты сглаживающего реактора.
Сокращение потерь в двигателе позволяет соответственно
увеличить число циклов в минуту. Когда время разгона и торможе-
ния в цикле ограничено 20 - 50 мс, а значения тока и ускорения при-
вода в переходном режиме ограничены по условиям допустимых
потерь, заметное влияние оказывает время нарастания тока в якоре,
зависящее от настройки регуляторов скорости и тока скоростного
контура.
Высокое быстродействие ШИП-Д при отработке возмущаю-
щих воздействий позволяет получить более высокую равномерность
перемещений. Благодаря этому свойству ШИП-Д успешно приме-
няются в координатно-измерительных машинах, установках для ла-
зерной обработки и контроля микросхем, установках для вытяжки
кристаллов и других устройствах, в которых требуются плавность
перемещений с низкими скоростями (0, 05 - 1, 0 мм/мин). Современ-
ные ШИП-Д при работе только скоростного контура обеспечивают
регулирование скорости в диапазоне 1: 30000 с нормированными по-
|
|
|
казателями неравномерности и стабильности.
Все перечисленные преимущества обусловили расширение
выпуска ШИП-Д мощностью до 6 - 12 кВт во всех промышленно
развитых странах. Этому способствовало снижение стоимости и по-
вышение надежности транзисторов на напряжения 300 - 400 В и то-
ки до 1000 А, транзисторных сборок в интегральном исполнении на
базе указанных транзисторов со встроенной защитой, диодных сбо-
рок в интегральном исполнении на базе быстрозапирающихся вен-
тилей на токи до 100 А, гибридных микросхем. Благодаря появле-
нию этих новых элементов удельные габаритные и стоимостные по-
казатели блоков преобразователей и источников питания ШИП-Д
приблизились к показателям тиристорных шестипульсных УВ.
Широтно-импульсный принцип регулирования проще сочета-
ется с непосредственным цифровым управлением, что определило
создание цифровых ШИП-Д, обеспечивающих более рациональную
структуру комплекса «управляющая ЭВМ – электропривод», воз-
можность реализации более сложных законов управления для меха-
низмов с переменными моментами инерции и упругостью (напри-
мер, роботов), исключение тахогенератора.
|
|
|
