 |


Определение параметров настройки регулятора
|
|
|
|
Для определения параметров k, ТИ для ПИ- и k, ТИ, ТП для ПИД- регуляторов можно использовать различные методы, мы подробнее остановимся на формульном методе определения настроек регулятора.
Формульный метод определения настроек регулятора используется для быстрой, приближенной оценки значений параметров настройки регулятора для трех видов оптимальных типовых процессов регулирования.
Метод применим как для статических объектов с самовыравниванием (таблица 6.7), так и для объектов без самовыравнивания (таблица 6.8).
Таблица 6.7 - Параметры настройки регуляторов для объектов с
самовыравниванием
| Регулятор | Типовой процесс регулирования | |
| апериодический | с 20% перерегулированием | |
| И | 
| 
|
| П | 
| 
|
| ПИ | 
| 
|
где T, τ,  - постоянная времени, запаздывание и коэффициент усиления объекта.
- постоянная времени, запаздывание и коэффициент усиления объекта.
В этих формулах предполагается, что настраивается регулятор с зависимыми настройками, передаточная функция которого имеет вид:
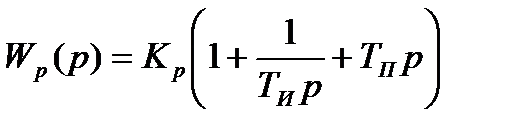 , (5)
, (5)
где  - коэффициент усиления регулятора;
- коэффициент усиления регулятора;
 - время изодрома (постоянная интегрирования регулятора);
- время изодрома (постоянная интегрирования регулятора);
 - время предварения (постоянная дифференцирования).
- время предварения (постоянная дифференцирования).
Таблица 8- Параметры настройки регуляторов для объектов
без самовыравнивания
| Регулятор | Типовой процесс регулирования | ||
| апериодический | с 20% перерегулированием | ||
| П | 
| 
| |
| ПИ | 
| 
| |
| ПИД | 
| 
| |
Когда параметры настройки регулятора определены, используя формулу 4, запишем передаточные функцию регулятора.
Расчеты параметров настройки ПИ-регулятора
С учетом типового процесса регулирования
Пример:
Рассматриваемый объект управления обладает самовыравниванием и аппроксимируется апериодическим звеном 1-го порядка. Исходя из этого, в качестве типового примем апериодический процесс.
|
|
|
Параметры регулятора определим из формулы:
Тогда Kp=5,4; Tи=5,4.
Таким образом, передаточная функция ПИ- регулятора примет вид:
 . (6)
. (6)
Расчеты параметров настройки ПИД- регулятора с учетом
Типового процесса регулирования
Параметры регулятора определим из формул:

Кр=8,59; Ти=4,8; Тп=0,8
Тогда передаточная функция ПИ- регулятора примет вид:
 . (7)
. (7)
Синтез замкнутой САР
До настоящего раздела речь шла об объекте управления, а также о регуляторе. После того, как были получены передаточные функции объекта управления и регуляторов, для дальнейших расчетов необходимо построить структурную схему САР.
Структурная схема одноконтурной САР промышленным объектом управления приведена на рисунке 7. Основными элементами ее являются: АР - автоматический регулятор, УМ - усилитель мощности, ИМ - исполнительный механизм, РО - регулируемый орган, СОУ - собственно объект управления, Д - датчик, НП - нормирующий преобразователь, ЗД - задатчик, ЭС - элемент сравнения.
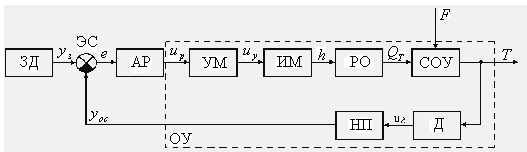
Рисунок 7 - Структурная схема САР промышленным объектом управления.
Обозначение переменных:  - задающий сигнал,
- задающий сигнал,  - ошибка регулирования,
- ошибка регулирования,  - выходной сигнал регулятора,
- выходной сигнал регулятора,  - управляющее напряжение,
- управляющее напряжение,  - перемещение регулирующего органа,
- перемещение регулирующего органа,  - расход вещества или энергии,
- расход вещества или энергии,  - возмущающее воздействие,
- возмущающее воздействие,  - регулируемый параметр (например температура),
- регулируемый параметр (например температура),  - сигнал обратной связи (выходное напряжение или ток преобразователя).
- сигнал обратной связи (выходное напряжение или ток преобразователя).
Характерной особенностью схемы является наличие нормирующего преобразователя НП, обеспечивающего работу автоматического регулятора со стандартными значениями тока (0-5 mA) или напряжения (0-10 В).
Нормирующий преобразователь выполняет следующие функции:
¾ преобразует нестандартный входной сигнал (mB) в стандартный выходной сигнал;
¾ осуществляет фильтрацию входного сигнала;
¾ осуществляет линеаризацию статической характеристики датчика с целью получения линейного диапазона;
|
|
|
¾ применительно к термопаре, осуществляет температурную компенсацию холодного спая термопары.
Для расчетных целей исходную схему упрощают до схемы, показанной на рисунке 7, где АР - регулятор, ОУ - объект управления. Здесь под объектом управления уже понимается неизменяемая часть системы, состоящая из преобразователей сигналов, исполнительного механизма, регулирующего органа, собственно объекта управления и датчика.

Рисунок 6.7 - Расчетная схема САР промышленным объектом управления
Основные требования к промышленным системам регулирования:
¾ Промышленная САР должна обеспечивать устойчивое управление процессом во всем диапазоне нагрузок на технологический агрегат;
¾ Система должна обеспечивать в окрестности рабочей точки заданное качество процессов управления (время переходного процесса, перерегулирование и колебательность);
¾ Система должна обеспечивать в установившемся режиме заданную точность регулирования. Желательно обеспечить нулевую статическую ошибку регулирования. Кроме этого желательно обеспечить заданную дисперсию ошибки регулирования.
Все эти условия будут выполняться, если объект управления является стационарным, либо его вариации параметров достаточно малы и компенсируются запасами устойчивости системы.
|
|
|
