 |


Задача №7: По виду фазового портрета определить показатели качества регулирования.
|
|
|
|

Перерегулирование: 
Колебательность (число колебаний): по скорости два, по моменту - два.
Время переходного процесса:


 ,
,  ,
, 
На участке  :
:  отсюда
отсюда 
Задача №8?: Выбрать систему автоматического регулирования и параметры регуляторов для механизма перемещения крана(D=1:10; Мс=25Нм).
Для заданного механизма необходимо строить САР скорости (систему стабилизации скорости). Реализуется на базе ДПТ с НВ – УВ:

Контур тока настраиваем на технический оптимум (оптимум по модулю) в качестве малой не компенсируемой постоянной времени принимаем:  ,
,  ,
,  .
.
Желаемая передаточная функция разомкнутого контура тока:  .
.
Передаточная функция разомкнутого контура тока:  .
.
Подставляя значение желаемой передаточной функции вместо передаточной функции разомкнутой системы и выражая передаточную функцию регулятора тока из полученного уравнения получим:


Параметры операционного усилителя определяются исходя из следующих формул:  ,
,  ,
,  ,
,  ,
,  - кратность тока.
- кратность тока.

Передаточная функция замкнутого контура тока:
 .
.
Желаемая передаточная функция разомкнутого контура скорости при настройке его на симметричный оптимум имеет следующий вид:
 , где
, где  .
.
Передаточная функция разомкнутого контура скорости:  .
.
Подставляя значение желаемой передаточной функции вместо передаточной функции разомкнутой системы и выражая передаточную функцию регулятора скорости из полученного уравнения получим:
 ;
;
 ;
;
 .
.
Параметры операционного усилителя определяются исходя из следующих формул:  ,
,  ,
,  ,
,  .
.

При выборе емкостей и сопротивлений для регуляторов задаемся емкостью, а все остальные сопротивления и емкости рассчитываются по приведенным выше формулам. При синтезе системы не учитываем противо - ЭДС двигателя, так как в данном случае мы рассматриваем процесс в малом, а при таком условии противо - ЭДС не оказывает значительного влияния. Для плавного запуска можно использовать задатчик интенсивности.  ,
,  .
.
|
|
|

Задача №9: Выполнить эскизное проектирование СЭП для рабочего механизма – ворота транспортной проходной по улице Тимирязьевская з-да «Строммашина». Рн=3.6 кВт, nн= 964 об/мин, сеть 3*380 В, 50 Гц. Продольное раскрытие.
Решение:Механизм служит для продольного раскрытия дверей на проходной. В состав установки входя электродвигатель, система управления и механический рабочий орган. Дверь имеет два конечных положения, которое ограничивается концевыми выключателями. При необходимости открыть дверь необходимо нажать кнопку открытия дверей, которые откроются и при достижении крайнего положения остановятся, аналогично и при закрытии. Необходимо предусмотреть коммутационные аппараты, защиту электрооборудования и питающей сети, а также дистанционное управление приводом.

Открытие дверей осуществляется при нажатии SB2, закрытие – SB3, остановка не в конечных положениях - SB1. В схеме предусмотрена сигнализация работы на открытие и на закрытие дверей при помощи лампы.
Магнитный пускатель КМ1, КМ2:  .
. 
- 

- Режим работы АС3 - Пуск АД с К.З.
- По числу вкл. в час (с учётом комут. и мех.износостойкости)
Автоматический выключатель QF1:
- 


-  Проверка
Проверка 
Предохранитель FU1:  ,
, 
- 
-  (
( ,
,  – параметры катушек КМ1,КМ2)
– параметры катушек КМ1,КМ2)
-  (ток лампочек)
(ток лампочек)
где ΣIРАБ.МАКС – наибольший суммарный ток, потребляемый катушками аппаратов, сигнальных ламп при одновременной работе;
ΣIВКЛ.МАКС – наибольший суммарный ток, потребляемый при включении катушек одновременно включаемых аппаратов аппаратов.
Кнопки, конечные выключатели:  ,
, 
Задача №10: Выбрать систему автоматического регулирования и параметры регуляторов для механизма подъема крана (D=1/10;Мс=50 Нм).
|
|
|
Решение:Для заданного механизма необходимо строить САР скорости (систему стабилизации скорости). Реализуется на базе ДПТ с НВ – УВ. Необходимо выбрать систему автоматического регулирования (САР) для ДПТ НВ. Регулирование скорости двигателя осуществляется с помощью тиристорного преобразователя. Регулирование скорости электродвигателя осуществляется по напряжению якорной цепи. Структурная схема тиристорного преобразователя представлена на рисунке: 
Подъемное устройство перемещает груз вверх/вниз с помощью барабана, которые приводятся во вращение электродвигателем через редуктор. Скорость перемещения груза вверх/вниз контролируется датчиком скорости (ДС). Задание требуемой величины скорости производится задатчиком скорости (ЗС), который формирует задающий сигнал для регулятора скорости (РС). РС формирует необходимый сигнал, поступающий на вход регулятора тока (РТ), на который приходит сигнал от датчика тока (ДТ). Сигнал с РТ поступает на систему импульсно-фазового управления (СИФУ) вентильного преобразователя (ВП). Напряжение на выходе вентильного (тиристорного) преобразователя является управляющим для ДПТ. Скорость вращения двигателя перед подачей на приводной барабан понижается с помощью редуктора (Ред). Линейная скорость подъемагруза измеряется посредством датчика скорости (ДС), сочлененным с валом электродвигателя. , .

Контур тока настраиваем на технический оптимум (оптимум по модулю) в качестве малой не компенсируемой постоянной времени принимаем: .
Желаемая передаточная функция разомкнутого контура тока:  .
.
Передаточная функция разомкого контура тока:  .
.

Параметры операционного усилителя определяются исходя из следующих формул: ,  , , ,
, , ,  - кратность тока.
- кратность тока.
ПФ замкнутого контура тока:
 .
.
Желаемая передаточная функция разомкнутого контура скорости при настройке его на симметричный оптимум имеет следующий вид:
 , где
, где  .
.
Передаточная функция разомкнго контура скорости: 

Параметры операционного усилителя определяются исходя из следующих формул:  , , , .
, , , .


При выборе емкостей и сопротивлений для регуляторов задаемся емкостью, а все остальные сопротивления и емкости рассчитываются по приведенным выше формулам. При синтезе системы не учитываем противо - ЭДС двигателя, так как в данном случае мы рассматриваем процесс в малом, а при таком условии противо ЭДС не оказывает значительного влияния. Для плавного запуска можно использовать задатчик интенсивности. ,  .
.
|
|
|
Проводим статические характеристики привода.


Статическая механическая характеристика — это зависимость выходной координаты системы от возмущающего воздействия при заданном задающем воздействии. В общем виде данная характеристика имеет вид: 
где  ,
,  - коэффициенты передачи по задающему и возмущающему воздействиям;
- коэффициенты передачи по задающему и возмущающему воздействиям;
 ,
,  - задающее и возмущающее воздействия соответственно.
- задающее и возмущающее воздействия соответственно.
Задача №11: Определить мощность двигателя и выбрать ЭП для центробежного вентилятора Q(м3/с),Р(Па), ременная механическая передача с i=1,  =95%.
=95%.
Технические требования к ЭП вентилятора: нагрузка является активной; привод нереверсивный;рабочая характеристика нелинейная(изменяется отношение к силе в зависимости от скорости).
Основными параметрами, характеризующими работу центробежного вентилятора, являются напор Н и производительность Q. Для вентилятора напор Н измеряется в единицах давления, и его можно трактовать как энергию, сообщаемую единице объема газа. Тогда полезная мощность вентилятора равна:

А мощность на валу:

Где ηВ– КПД вентилятора.
В практических расчетах напор Н вентилятора измеряют в миллиметрах водного столба(1 мм.вод.ст.=10 Па). В такой системе измерения напор Н определяется по формуле:

где  - плотность воды, кг/м3;
- плотность воды, кг/м3;  кг/м3;
кг/м3;
h– напор, мм.вод.ст.;
g– ускорение свободного падения, м3/c.
Номинальная мощность двигателя вентилятора определяется по формуле:

Механическую характеристику вентилятора можно рассчитать по формуле:

где Мс – момент на валу вентилятора, Нм;
ω– угловая скорость вентилятора, рад/с.
Характеристика магистрали:

где hМАГ– напор в магистрали, мм.вод.ст.;
КМАГ – коэффициент сопротивления магистрали.
Диапазон регулирования угловой скорости вентилятора, обеспечивающий заданное регулироавние производительности, пропорционалени диапазону регулирования подачи:
|
|
|

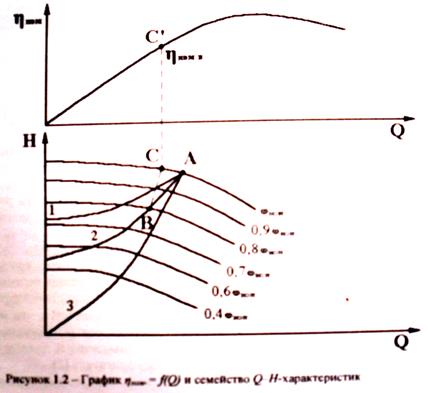
Характеристики турбомеханизмов:

Рациональные системы: 1) АДКЗ, АДсФР (пусковыми реостатами, если не возможен прямой пуск), СД, ТРН—АД, машинно-вентильный каскад, ДПТ, АДКЗ - ТПЧ; 2) гидромуфты, электромагнитные муфты; ЭМ порошковая муфта. Q-H-характеристики центробежного вентилятора:

Задача №12: Определить мощность и выбрать ЭП механизма горизонтального перемещения мостового крана. Грузоподъёмность GT1(т), масса крана GT0(т), скорость линейного перемещения V(м/с), радиус приведения к валу двигателя R (м), i, η, ПВр=5%.
Решение
Зададимся aдоп=0,1…0,25
Время пуска и торможения: tП= tТ=V/a
tуст=tр-(tП +tТ)
Момент статической нагрузки при движении с грузом ( ) и без груза (
) и без груза ( )
)


 - коэффициент трения скольжения
- коэффициент трения скольжения  =0,02;
=0,02;
f - коэффициент трения качения подшипников: f=0.8*10-3
 - диаметр цапфы: =0,08 м
- диаметр цапфы: =0,08 м
 - коэффициент трения реборд ходовых колёс: =2,5
- коэффициент трения реборд ходовых колёс: =2,5
Момент двигателя при пуске с грузом: МП1= МС1+ JΣ*εдоп; εдоп= aдоп /R
Момент двигателя при торможении с грузом: МТ1= МС1- JΣ*εдоп
Момент двигателя при пуске без груза:
МП2= МС2+ J`Σ*εдоп J`Σ=1,3 GT0*103*R2; МТ2= МС2- J`Σ*εдоп



Проверим по перегрузочной способности 
По условиям пуска 
Возможные варианты ЭП: АД с КЗ (с двойной белечьей клеткой), АД с ФР (реостаты в цепи ротора), ДПТ-НВ (с реостатами в цепи якоря)
Задача №13: Выполнить эскизное проектирование схемы Э3 для рабочего механизма – пожарный насос-повыситель второго общежития БРУ. Pн=22кВт, nн=2914 об/мин, сеть 3~ 380 В 50Гц, высота подъёма 42 м, давление 4 атм.
Пожарный насос-повыситель предназначен для поддержания постоянного давления жидкости в пожарной системе. Схема электрическая принципиальная для рабочего механизма – пожарный насос-повыситель представлена на рисунке 1. Для определения давления в гидросистеме служит пневмоемкость, в которой установлены два датчика давления жидкости: минимального давления BP1, максимального давления BP1. При возникновении пожара срабатывает пожарный извещатель А1. Электрический импульс от пожарного извещателя подается на приемную станцию пожарной сигнализации А2, включаются приборы световой (ВУОС)и звуковой сигнализации (на схеме не показаны). Подается питание в цепь управления насоса-повысителя. Если давление в гидросистеме меньше минимального, срабатывает датчик BP1, подается питание на катушку магнитного пускателя КМ1 и запускается двигатель насоса М1, включается лампа HL1 «Насос включен». При достижении максимального давления, срабатывает датчик BP2, подает питание на катушку промежуточного реле К1, которое своим размыкающим контактом размыкает цепь питания катушки магнитного пускателя КМ1, двигатель М1 отключается от сети, снимается питание лампочки HL1 «Насос отключен».
|
|
|
Режим работы установки S3.
Режимы управления:
1) ручное управление, для наладки и диагностики;
2) автоматическое управление.

Рисунок 1
ВУОС – выносное устройство оптической сигнализации.
BP1, BP2 – датчики минимального и максимального давления с релейным выходом.
Защиты:
1) от токов короткого замыкания;
2) от длительных токовых перегрузок;
3) от КЗ в цепи управления;
4) от понижения напряжения.
Сигнализация;
1) Насос включен;
2) Пожар (ВУОС).
Выбор аппаратов
1 Выбор ЭД: 5АИ180S2, Рн=22 кВт, Iн=41А, КПД=90,5%, cosφ=0,9, Iп/Iн=7,5, µmax=2,3, µп=2;
2 Выбор КМ1: 
1.  ;
;
2.  ;
;
3.  ;
;
4. Режим работы АС3 - Пуск АД с К.З. Отключение вращающихся двигателей при номинальной нагрузке.
5. По числу включений в час (с учётом коммутативной и механической износостойкости)
3 Автоматический выключатель:
1.  ; 2
; 2  ;
;
3 
4  ;
;
4 Кнопки управления SB1, SB2:  ;
;  . Должны без повреждений включать пусковые токи.
. Должны без повреждений включать пусковые токи.
5 Промежуточное реле К1:
- по номинальному напряжению катушки аппарата:Uн.кат.=Uсети;
- по номинальному напряжению контактов аппарата:Uн.конт.≥Uсети.
6 Предохранитель FU1:
1)  ;
;
2) 
где ΣIРАБ.МАКС – наибольший суммарный ток, потребляемый катушками аппаратов, сигнальных ламп при одновременной работе;
ΣIВКЛ.МАКС – наибольший суммарный ток, потребляемый при включении катушек одновременно включаемых аппаратов аппаратов.
7 Лампа HL1:  .
.
Задача №14: Выполнить эскизное проектирование ЭП подачи сварочной проволоки. Параметры электродвигателя  Вт,
Вт,  В. Диапазон регулирования D=1:10.
В. Диапазон регулирования D=1:10.
Строится система стабилизации скорости на базе УВ с ОС по току и ЭДС.
(D=1:10)
БЗС - блок задания скорости; ГОН- генератор опорного напряжения
ЭС - элемент сравнения; ВК- выходной каскад; ГР- гальваническая развязка; У- усилитель.

Магнитный пускатель КМ1:
1) 
2) 
3) 
4) Режим работы (АС1..АС4). АС3 – Пуск АД с к.з.
5) По числу включений в час(с учетом коммутационной и механической износостойкости)
Автоматический выключатель QF1:
1) 
2)  3)
3) 
4) 
Проверка 
Предохранитель FU1:
 ,
, 

 (S,U – параметры катушки КМ1)
(S,U – параметры катушки КМ1)
Задача №15: Выполнить эскизное проектирование схемы электрической принципиальной для рабочего механизма - грузовой лифт библиотеки ММИ.  кВт,
кВт,  об/мин, сеть 3*380В, 50Гц. Четыре остановки, 6 дверей, грузоподъемность 60 кг.
об/мин, сеть 3*380В, 50Гц. Четыре остановки, 6 дверей, грузоподъемность 60 кг.
ЭТ - электромагнитный тормоз, ДП- датчик перегрузки, КП1,КП2- контакты пола, КВ,КП- кнопки вызова и приказа, ЭП- этажный переключатель.
Если перегрузка, то при нажатии КП движения не будет, так как срабатывает датчик перегрузки и размыкает цепь питания КТ1. При снятии части груза, после небольшой выдержки времени (чтобы убрать руки) лифт начнет движение. Если лифт начали нагружать КП1 блокирует кнопки вызова (с других этажей), КП2 - подключает кнопки приказа. Когда лифт начинает движение, на каждом из этажей горит лампочка (кроме этажа, на который лифт вызван), что говорит о том, что лифт занят. После прибытия лифта лампочка за счет КТ2 горит еще некоторое время, необходимое для начала загрузки кабины (пока не сработает К1).
Выбор элементов схемы:
Магнитные пускатели (КМ1,КМ2,КМ3):
1) 
2) (для КМ3  )
) 
3)
6) Режим работы АС3 (для КМ3 возможно АС1)
7) По числу включений в час(с учетом коммутационной и механической износостойкости)
Автоматический выключатель QF1:
1)
2) 
3) 
4)  Проверка: (
Проверка: ( )
)
Промежуточные реле, реле времени:
1)
2)  (длительный расчетный ток линии)
(длительный расчетный ток линии)
3)  В
В
4) По числу контактов
5) По создаваемым выдержкам времени (для реле времени)
Кнопки управления, переключатели:
1) 
2) 
Должны без повреждений включать пусковые токи.

Задача №16: Выбрать систему автоматического регулирования и параметры регуляторов для намоточного устройства (D=1:5,  ).
).
Данная система автоматического регулирования работает одновременно в режимах стабилизации и задания выходных переменных.
Необходимо выбрать систему автоматического регулирования (САР) для электродвигателя постоянного тока с независимым возбуждением.
Регулирование скорости двигателя осуществляется с помощью тиристорного преобразователя. Регулирование скорости электродвигателя осуществляется по напряжению якорной цепи. Структурная схема тиристорного преобразователя представлена на рисунке:
Наматывающее устройство перемещает материал с помощью пары валков, которые приводятся во вращение электродвигателем через редуктор. Второй электродвигатель соединен через редуктор с наматывающим устройством.
Натяжение материала контролируется датчиком натяжения (ДН). Изменение натяжения может производиться увеличением скорости электропривода намотки. Задание требуемой величины натяжения производится задатчиком натяжения (ЗН), который формирует задающий сигнал для регулятора натяжения (РН). РН формирует необходимый сигнал, поступающий на систему импульсно-фазового управления (СИФУ) вентильного преобразователя (ВП). Напряжение на выходе вентильного (тиристорного) преобразователя является управляющим для первого ДПТ. Скорость вращения двигателя перед подачей на приводной вал понижается с помощью редуктора (Ред).
Линейная скорость подачи материала измеряется посредством датчика скорости (ДС), сочлененным с валом второго электродвигателя. Задание требуемой величины скорости производится регулятором натяжения (РН), который формирует задающий сигнал для регулятора скорости (РС). Напряжение на выходе преобразователя является управляющим для ДПТ.

Настроим контур тока на модульный оптимум:





Настроим контур скорости на симметричный оптимум:





Для уменьшения перерегулирования на вход контура скорости необходимо поставить фильтр со следующей передаточной функцией: 
Контур натяжения настроим на МО приняв что: 




Статическая механическая характеристика — это зависимость выходной координаты системы от возмущающего воздействия при заданном задающем воздействии. В общем виде данная характеристика имеет вид:
где , - коэффициенты передачи по задающему и возмущающему воздействиям;
, - задающее и возмущающее воздействия соответственно.
- статическая характеристика поддержания натяжения (рисунок 3.2, а);
- статическая характеристика поддержания скорости (рисунок 3.2, б).


а) б)
Рисунок 3.2 – Статические характеристики САР
Задача №17: Определить мощность и выбрать ЭП для центробежного насоса. Даны: Q(м3/с), Р(Па), 
Технические требования к ЭП насоса: нагрузка является активной; привод нереверсивный; рабочая характеристика нелинейная(изменяется отношение к силе в зависимости от скорости); электропривод должен обеспечивать следующие режимы: управление пуском и остановкой двигателя; автоматические пуск и торможение насоса; автоматическое регулирование производительности; автоматическую остановку насоса при отклонении от допустимых значений; световую и звуковую сигнализацию.
Решение
Полезная мощность, развиваемая турбомеханизмом:

Где  – удельный вес жидкости, кН/м3;
– удельный вес жидкости, кН/м3;

где Р1, Р2 — давления откуда перекачиваются и куда
Нг — геодезическая высота, м
 — потери напора в магистрали
— потери напора в магистрали
Мощность приводного двигателя насоса:

Характеристики турбомеханизмов:

Рациональные системы: 1) АДКЗ, АДсФР (пусковыми реостатами, если не возможен прямой пуск), СД, ТРН—АД, машинно-вентильный каскад, ДПТ, АДКЗ - ТПЧ; 2) гидромуфты, электромагнитные муфты; ЭМ порошковая муфта.
Задача №18: Определить мощность и выбрать ЭП для шпинделя токарного станка. Усилие резания Fр(Н), радиус приведения р(м), передаточное отношение редуктора i, КПД передачи 
Решение
Момент на шпинделе станка  где R—радиус обрабатываемого изделия
где R—радиус обрабатываемого изделия 


Момент статического сопротивления на валу двигателя 

Проверка на перегрузочную способность

Мсmax— максимальное значение момента нагрузки в течение рабочего цикла.
ДПТ—УВ(двухзонное регулирование)+ 2-х ступенчатая коробка передач, АД—ПЧ+ 2-х ступенчатая коробка передач
|
|
|
