 |


Способ бокового нивелирования
|
|
|
|
Способ прямой угловой засечки
В этом способе положение проектной точки К (рис. 1.48) определяют путем откладывания в опорных точках А и В от опорной линии АВ проектных углов β1 и β2. Базисом b является сторона разбивочной сетки или его измеренное значение. Проектные углы β1 и β2 вычисляют как разность дирекционных углов сторон, которые определяют из решения обратной геодезической задачи на плоскости по проектным координатам исходных пунктов и определяемой точки.

Рис. 1.48. Способ прямой угловой засечки
Точность разбивки рассматриваемым способом зависит от ошибки самой засечки, исходных данных, центрирования теодолита и визирной цели, фиксации определяемой точки.
Способ линейной засечки
этом способе положение проектной точки К на местности определяют в пересечении проектных расстояний d1 и d2, его применяют в основном для разбивки осей строительных конструкций при d1 и d2 меньше длины мерного прибора. Одной рулеткой от А откладывают d1, а рулеткой от точки В отрезок d2. Пересечение отрезков d1 и d2 (при совмещении нулей рулеток с точками А и В) дает определяемую точку К (рис. 1.51).
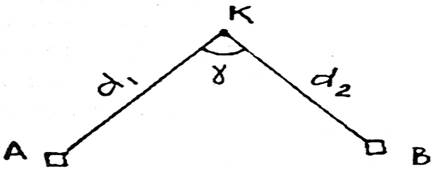
Рис. 1.51. Линейная засечка
Способ пересечения створов
В этом способе положение точки К определяют при пересечении створов Т1Т'1 и Т2Т'2. Створы на местности задают точками их пересечения с опорными сторонами. Положение точек T1, Т2 определяют горизонтальными проложениями d1 и d2 от опорной точки В по опорным линиям ВА и ВС, а точек Т'1, Т'2 — d'1, d'2 от опорной точки Е по линиям EF и ED. Способ пересечения створов (рис. 1.52) обычно используют для выноса в натуру труднодоступных точек, когда использование других методов затруднено.

|
|
|
Рис. 1.52. Пересечение створов
Преимущество этого способа в том, что створы T1 Т'1 и Т2 Т'2 и точку К легко восстановить, что обеспечивает оперативный контроль точки К в процессе строительства при минимальном объеме геодезических работ.
Способ бокового нивелирования
Этот способ часто применяют для выноса осей при детальной разбивке и для установки строительных конструкций в проектное положение (рис. 1.53). Пересечение К линии АВ с конструкцией определяют следующим образом. От точек А и В по перпендикуляру к АВ откладывают отрезки l и получают точки А', В' и линию А'В', параллельную АВ. Над точкой А' устанавливают теодолит, приводят его в рабочее положение и перекрестие нитей наводят на точку В'. К конструкции в горизонтальном положении устанавливают рейку и перемещают ее так, чтобы отсчет по ней был равен l. Пятка рейки даст положение точки К. Подобным образом определяют и положение точки К'.

Рис. 1.53. Боковое нивелирование
Основными ошибками бокового нивелирования являются:
- ошибка mств разбивки параллельного створа;
- ошибка mц центрирования теодолита и визирной цели в точках A' и В';
- ошибки установки рейки mу;
- ошибки отсчета по рейке m0.
59. ПЕРЕДАЧА ОТМЕТОК НА ДНО КОТЛОВАНА И МОНТАЖНЫЙ ГОРИЗОНТ.
Для передачи отметок на дно котлована с крутыми откосами или на монтажный горизонт используют методы геометрического или тригонометрического нивелирования. При этом должны быть известны отметки ближайших реперов Нрп и проектные отметки на дне котлована Нк или монтажном горизонте Нм (рис. 67). Непосредственно из рисунка видно, что "проектные рейки" на монтажном горизонте bм и на дне котлована bк будут:
bм = Нрп + а + сd - Hм, bк = Нрп + а' + c'd' - Hк,
где а и а' - отсчеты по черным сторонам реек, установленных на репере,
сd и c'd' - длины отрезков определяемые по отсчетам на рулетках, подвешенных на кронштейнах соответственно на монтажном горизонте и на верхней бровке откоса котлована и натянутых вертикально с помощью грузов.
|
|
|
Погрешность передачи отметки методом геометрического нивелирования с использованием рулетки и реек составляет около 4 мм, если принять погрешность одного отсчета по рейке и рулетке равной 2 мм (2. √4).

Рис. 67 Схема передачи отметок методом геометрического нивелирования
Метод тригометрического нивелирования, выполняемый с помощью технического теодолита, на порядок менее точен по сравнению с геометрическим и сводится к вычислению и построению вертикального угла n и закреплению соответствующей этому углу точки С с заданной проектной отметкой Нпр (рис. 68)
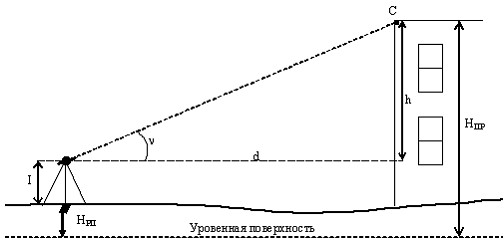
Рис. 68. Схема передачи проектной отметки на монтажный горизонт
методом тригонометрического нивелирования
Угол наклона визирной оси теодолита определяется в этом случае по известной формуле:
ν = arctg(h/d),
где h = Нпр - Нрп - I,
d - горизонтальное проложение между прибором и точкой С,
I - высота прибора.
При невозможности непосредственного измерения величины d, это расстояние может быть определено как неприступное по теореме синусов.
|
|
|
