 |


Программирование работы смесителя в среде
|
|
|
|
Alpha – Programming
Среда программирования Alpha – Programming используется при составлении программ только на языке ФБД для логических контроллеров " - серии фирмы MITSUBISHI ELECTRIC. Использование одного и того же языка программирования, схожесть контроллеров по классу решаемых задач и т.д. не только объясняют похожесть Alpha – Programming и LOGO Soft-Comfort, но и допускают некоторые отличия в практике их применения. Эти отличия проявляются в наборах функциональных блоков, в выполняемых блоками функциях и удобстве их задания и, конечно, в пользовательском интерфейсе.
На рис. 4.10 приведена программа, составленная в Alpha – Programming применительно к той же задаче дозирования и смешивания компонентов. Обращают на себя внимание отличия в интерфейсах сред программирования. То, что порты подключения входных и выходных сигналов вынесены на боковые границы окна, способствует более удобной «читаемости» программы. Различия в обозначениях функциональных блоков в обеих программах не создают в большинстве случаев больших трудностей в понимании функционального назначения блока. Средствами Alpha – Programming элемент выдержки времени (таймер) представлен блоком ONE SHOT с выходным сигналом B 06. Это по сути дела одновибратор, у которого время нахождения во включенном состоянии, отсчитываемое от момента включения, может быть заранее задано (предустановлено) в широком диапазоне значений. Очень удобен по функциональному назначению и способу задания режима блок PULSE для укорочения входного сигнала – своего рода «дифференциатор» импульсов по любому из фронтов в отдельности или по обоим вместе. Один из элементов PULSE (с выходным сигналом B01) устанавливает R – S триггер по переднему фронту сигнала включения кнопки «ПУСК», т. е. настроен на переключение в режиме from OFF to ON. Выходной сигнал B12 второго элемента PULSE сбрасывает триггер B02 в нулевое состояние как только заканчивается перемешивание смеси, поэтому блок отрабатывает переключение from ON to OFF.
|
|
|
Совпадение во времени импульсов установки и сброса R – S триггеров не приводит к запрещённой комбинации, как в реальной схемотехнике, так как во всех средах программирования предусмотрена возможность назначения приоритетов для одного из входных сигналов над другим, например: Prior = RESET.

Рис. 4.10
В программе на рисунке 4.10 возможность наложения сигналов установки и сброса максимально предотвращена. Так, например, для триггера B02 применены укороченные сигналы B01 и B12, а сигналы B09 и B11, действующие на входах B10, разнесены из–за естественного переключения I 04 и I 06.

Рис. 4.11
Заметим, что во всех вариантах программы, которые были рассмотрены до сих пор, окончание каждого цикла подготовки смеси приводило к остановке работы и требовало для запуска очередного цикла повторного нажатия кнопки «ПУСК».
Чтобы перевести работу объекта в режим непрерывного повторения, как и раньше (рис. 4.8), с одной из точек программы, которая совпадает по циклограмме работы с моментом окончания выгрузки смеси, подан импульс запуска, заменяющий нажатие пусковой кнопки. В программе на рис. 4.11 это реализовано применением дифференциатора с выходным сигналом B16 и дизъюнктора (выход B15) для логического суммирования сигналов установки триггера.
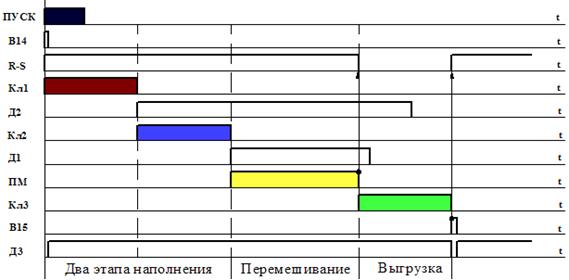
Рис. 4.12
Временные диаграммы работы смесителя, в соответствии с которыми обеспечен режим многократного повторения цикла дозирования и смешивания, представлены на рис. 4.12.
5. Способы обеспечения плавного изменения регулируемых параметров.
В предыдущих главах приводились сведения о том, что логические контроллеры даже малых, наиболее лёгких моделей, могут иметь средства для аналогового управления параметрами нагрузки. К таким видам воздействия относятся все способы управления, при которых регулируемый параметр изменяется не дискретно, в режиме «включено / выключено», а может изменяться плавно, принимая в некотором диапазоне любое из возможных промежуточных значений. Примерами применения таких способов управления могут служить: регулирование температур в различных зонах объекта, давлений, уровней жидких и сыпучих сред, их объёмного или массового расхода.
|
|
|
Проектирование объектов подобного типа должно основываться на чётком представлении о характере и всех особенностях решаемой задачи и начинаться с подбора необходимого регулирующего и исполнительного (для широкого круга задач – приводного) оборудования. На основе анализа инструкций по эксплуатации выбранных компонентов необходимо установить, какие сигналы нужно сформировать для включения, выключения, регулирования и, если это требуется для выполнения задачи, - реверса выбранных устройств и соотнести это с возможностями применяемого контроллера. Только после того, когда уже станет достоверно известно, какие сигналы могут придти на входы ПЛК, и что надо выдать на его выходных цепях, можно приступать к составлению программы работы ПЛК.
|
|
|
