 |


Электрогидравлическая следящая система с электромагнитом
|
|
|
|
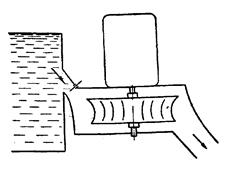
Следящая система (рис. 26) представляет собой замкнутую систему регулирования угла поворота вала (отрабатывающей оси) объекта управления (ОУ) J2, управляемого гидроприводом ГП через редуктор Р. Задающее воздействие устанавливается путем поворота некоторого задающего вала (задающей оси) на угол J1. Два потенциометра чувствительного элемента ЧЭ соединены с задающей и отрабатывающей осями. Напряжение, снимаемое с каждого из делителей, пропорционально углу поворота оси потенциометра J1 или J2. Разность этих напряжений (напряжение рассогласования) подается на усилитель У, питающий обмотку электромагнита ЭМ. При любом несоответствии положения задающей и отрабатывающей осей в цепи усилителя появляется напряжение рассогласования. В обмотке электромагнита возникает ток и магнитная сила смещает золотник гидропривода ГП, который вращает объект управления ОУ до тех пор, пока угол поворота отрабатывающей оси не станет равным углу поворота задающей оси и напряжение рассогласования не снизится до нуля.

Рис. 26. Электрогидравлическая следящая система с электромагнитом
Для обеспечения устойчивости всей системы и повышения качества переходных процессов применяется корректирующая цепь КЦ, содержащая тахометрический генератор ТГ, измеряющий скорость движения золотника гидропривода. Напряжение коррекции, пропорциональное скорости золотника, подается в цепь сравнения и складывается с напряжением рассогласования. В динамическом режиме корректирующая цепь несколько замедляет разгон двигателя, однако при этом она заглушает автоколебания в системе. Функциональная схема рассматриваемой системы показана на рис. 27. Исходные данные приведены в табл. 13.
|
|
|

Рис. 27. Блок-схема следящей системы
Таблица 13
Исходные данные
| Звено | Параметр | Значение | ||
| вариант 1 | вариант 2 | вариант 3 | ||
| Задающий и принимающий потенциометры | kП, В/рад | 1 | 1,5 | |
| Усилитель | kУ | |||
| Электромагнит | kМ, м/В | 0,001 | 0,001 | 0,002 |
| Гидропривод с редуктором Р2 и объектом управления ОУ | ТГ, с | 0,5 | 0,8 | 1,0 |
| kГ, рад/м |
Система автоматического регулирования давления
На рис. 28 показана система автоматического регулирования давления. 
Рис. 28. Система автоматического регулирования давления
Датчик давления 2 настроен на определенное давление в ресивере 1. При отклонении давления pk от заданного значения мембрана датчика 2 прогибается и через шток смещает трубку струйного усилителя 3. В результате возникает разность давлений в цилиндре гидравлического двигателя 4 и поршень двигается, поворачивая заслонку 5, таким образом изменяется подача газа, чтобы привести давление pk к заданному значению. Работа мембранного датчика с трубкой струйного усилителя описывается уравнением x = kM Δp, где x – смещение конца струйной трубки, Dp – отклонение давления от заданного, которое определяется настройкой датчика, kM – коэффициент пропорциональности.
Блок-схема системы представлена на рис. 29. Исходные данные приведены в табл. 14.

Рис. 29. Блок-схема системы автоматического регулирования давления.
Таблица 14
Исходные данные
| Звено | Параметр | Значение | ||
| вариант 1 | вариант 2 | вариант 3 | ||
| Мембранный датчик с трубкой | kМ, м/Па | 10–8 | 2∙10–8 | 10–8 |
| Струйная трубка | kС, Па/м | 2∙108 | 2∙108 | 3∙108 |
| Поршень с рычагом и заслонкой | kП, рад/Па | 10–5 | 2∙10–5 | 2∙10–5 |
| Ресивер | ТР, с | |||
| kР, Па/рад | 4∙105 | 4∙105 | 4∙105 |
Уравнения элементов САУ
Ниже приведены уравнения элементов систем автоматического управления, которые используются при построении систем в вариантах заданий п. 2.
|
|
|

| Гидравлический серводвигатель (гидропривод) , где x – перемещение штока поршня; xк – перемещение штока золотника; TГ – постоянная времени; kД – коэффициент передачи. | ||||
| Дизель , где l – положение рейки топливного насоса; w – угловая скорость вращения вала дизеля; TД – постоянная времени дизеля; kД – коэффициент передачи дизеля. | ||||

| Центробежный тахометрический датчик , где x – перемещение нижней ползушки; w – угловая скорость вращения; T, x, k – параметры датчика. | ||||

| Гидравлическое корректирующее устройство изодромного типа (изодром) , где TИ – постоянная времени изодрома. | ||||
| Гидротурбина Уравнение турбины в отклонениях от установившегося режима , где – относительное отклонение угловой скорости от установившегося значения w0; – относительное перемещение задвижки 3, z0 – положение задвижки в установившемся режиме; – постоянная времени гидротурбины, где JП – момент инерции турбины; M0 – момент сопротивления в установившемся режиме. | ||||

| Сушильная башня для производства серной кислоты , где x(t) – напряжение с газоанализатора, пропорциональное относительной концентрации газа SO2 в смесителе; l (t) – положение заслонки; T1, T2 – постоянные времени; k – коэффициент передачи. | ||||

| Электромашинный усилитель , где kУ – коэффициент усиления ЭМУ; TУ – постоянная времени. | ||||

| Тахогенератор UТ = kТ w, где w – угл. скорость вращения вала; UТ – напряжение; kТ – коэффициент передачи. | ||||

| Корректирующая RC-цепь , где U1 – входное напряжение; U2 – выходное напряжение; TK = R∙C – постоянная времени цепи. | ||||
| Термосопротивление в мостовой схеме UT = kT DJ, где kT – коэффициент передачи измерителя; DJ – отклонение температуры от номинального значения; UT – напряжение. | ||||

| Теплообменник , где kТО – передаточный коэффициент теплообменника; T1, T2 – постоянные времени теплообменника; J – температура; a – угол поворота заслонки. | ||||
| Электрический двухфазный двигатель переменного тока , где TД –постоянная времени двигателя; kД – коэффициент передачи двигателя; uу – напряжение на управляющей обмотке; wдв – угл. скорость вращения вала. | ||||

| Струйная трубка Dp = p1 – p2 = kc h, где h – отклонение конца трубки от среднего положения; p1, p2 – значения давлений в выходных каналах; kc – постоянный коэффициент, зависящий от конструкции трубки и входного давления. | ||||
| Электромагнитный усилитель , где U1 – входное напряжение; U2 – выходное напряжение; kM – коэффициент усиления; TM – постоянная времени магнитного усилителя. | ||||
| Поворотный пневматический двигатель a = kП Dp, где Dp = p1 – p2 – перепад давлений; a – угол поворота вала двигателя; kП – коэффициент передачи двигателя. | ||||

| Самолет (угол тангажа) , где J – угол тангажа; dВ – угол отклонения руля высоты; kС, TС, TС1, xС – параметры самолета. | ||||
| Потенциометр U = kп b, где U – напряжение; b – угол поворота движка потенциометра; kп – коэффициент передачи. | ||||
| Угольный регулятор , где U – напряжение на обмотке электромагнита; R – сопротивление угольного столба; TУ – постоянная времени; xУ – коэффициент затухания; kУ – коэффициент передачи. | ||||

| Генератор постоянного тока напряжение генератора UГ пропорционально току в обмотке возбуждения iВ и частоте вращение вала генератора w: UГ = c w iВ = kГ iВ, где kГ = c w – коэффициент передачи генератора (частоту вращения w считаем постоянной). | ||||

| Трансформатор , где U1 – входное напряжение; U2 – выходное напряжение; TT = LТР / RТР; LТР, RТР – индуктивность и сопротивление первичной обмотки трансформатора; kT =– коэффициент трансформатора, где w1, w2 – число витков первичной и вторичной обмоток. | ||||

| Индуктивный датчик Ue = kД e, где e – смещение; Ue – выходное напряжение датчика. | ||||

| Электрический двигатель постоянного тока , где TД –постоянная времени двигателя; kД – коэффициент передачи двигателя; U – напряжение на управляющей обмотке; w – угловая скорость вращения вала. | ||||
| Электромагнит x = kM U, где x – перемещение сердечника магнита; U – напряжение на обмотке магнита; kM – коэффициент передачи электромагнита. | ||||

| Ресивер Tp + p = kp j, где p – давление в ресивере; j – угол поворота заслонки; Tp, kp – параметры ресивера. | ||||

| Мембранный датчик давления x = kД Dp, где Dp – отклонение давления от заданного значения; x – перемещение мембраны; kД –коэффициент передачи датчика. | ||||

| Поршень с рычагом и заслонкой j = kП Dp, где j – угол поворота заслонки; Dp – перепад давлений на поршне; kП – коэффициент передачи. | ||||
Контрольные вопросы
|
|
|
|
|
|
1. Как получить передаточную функцию САУ, зная ее дифференциальное уравнение?
2. Как получить дифференциальное уравнение САУ, зная ее передаточную функцию?
3. В чем отличие между передаточными функциями разомкнутой и замкнутой системами?
4. Как получить передаточную функцию САУ по ее структурной схеме?
5. Что называют амплитудно-частотной характеристикой (АЧХ)?
6. Что такое фазо-частотная характеристика (ФЧХ)?
7. Как построить амплитудно-фазовую характеристику (АФХ)?
8. Чем отличаются частотные характеристики (АЧХ и ФЧХ) от логарифмических частотных характеристик (ЛАЧХ и ЛФЧХ)?
9. Что такое переходная характеристика?
10. Как составляется главный определитель Гурвица?
11. Какую передаточную функцию (замкнутой или разомкнутой системы) необходимо использовать в критерии а) Гурвица? б) Михайлова? в) Найквиста?
12. Каким образом судить об устойчивости по кривой Михайлова?
13. Как должна проходить АФХ разомкнутой системы, чтобы САУ была устойчивой?
14. Как определить частоту среза системы?
15. Как найти запасы устойчивости а) по АФХ системы? б) по ЛЧХ?
16. Что называют коэффициентами ошибок?
17. Как их определить?
18. Как найти установившуюся ошибку, если известны коэффициенты ошибок?
19. Как определить а) время регулирования САУ? б) перерегулирование? в) колебательность переходного процесса?
Библиографический список
1. Иващенко Н. Н. Автоматическое регулирование. Теория и элементы систем. М.: Машиностроение, 1978. – 736 с.
2. Егоров К.В. Основы теории автоматического регулирования. М.: Энегрия, 1967. – 648 с.
3. Теория автоматического управления / Под ред. Соломенцева Ю.М., М.: Высшая школа, 2000.– 268 с.
4. Теория автоматического управления / Под ред. Нетушил А.В., М.: Высшая школа, 1976.– 400 с.
5. Попов Е.П. Теория линейных систем автоматического регулирования и управления. М.: Наука, 1989.– 301 с.
6. Аверьянов Г.С., Туровец А.Г., Яковлев А.Б. Управление в технических системах. Омск: ОмГТУ, 2000.– 80 с.
|
|
|
