 |


Автоматизация свайных работ с применением вибропогружателей
|
|
|
|
Для контроля вертикального и высотного положения сваи при ее погружении используются лазерные приборы, оборудованные специальными устройствами. Эти устройства 1 (рис.213) обеспечивают разделение выходящего лазерного пучка на горизонтальный 2 и наклонный 3, которые направляются соответственно к нижней 6 и верхней 5 рискам, расположенным на свае 4. При этом прибор устанавливается по высоте так, чтобы горизонтальный пучок находился на уровне проектной отметки оголовка сваи, т.е. совпал с риской 5 при полном ее погружении. В Процессе погружения сваи проекции лазерных пучков должны находиться на ее геометрической оси. При этом угол наклона пучка 3 уменьшается и при достижении горизонтального положения погружение сваи прекращается.
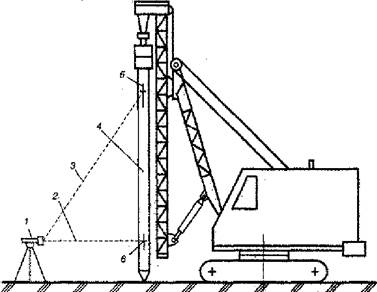 Рис.213. Контроль точности погружения свай по двум лазерным лучам
Рис.213. Контроль точности погружения свай по двум лазерным лучам
|
оборудуют автоматическими. системами изменения таких параметров, как моменты дебаланса и частота. Это, в свою очередь, изменяет вынуждающую силу и позволяет более эффективно использовать мощность двигателей при работе в постоянно изменяющихся грунтовых условиях.
В автомат управления поступают сигналы от датчика мощности о ее величине в процессе погружения свай и от переключателей и концевых выключателей, фиксирующих крайние положения регулятора скорости погружения и положения подвижных частей дебалансов. На исполнительные устройства автомат управления выдает командные сигналы о включении и реверсе сервомотора регулятора скорости и включении электромагнитов реверсивного золотника, предназначенного для управления перемещением дебалансов.
В автоматике управления расположен задатчик мощности, устанавливающий необходимые пределы ее потребления. Здесь происходит сравнение потребляемой мощности с ее заданным уровнем. В соответствии с алгоритмом управления погружением сваи уменьшается скорость вращения и статический момент дебалансов. При этом происходит так называемый сброс частоты, т. е. уменьшение скорости вращения рабочего органа за счет подачи на сервопривод регулятора скорости требуемого напряжения.
|
|
|
Для устройства набивных свай используют регулятор подачи винтовых рабочих органов. Этот регулятор состоит из электронного блока с устройством рассогласования и формирователем, блока управления приводом подачи и блока привода. Он обеспечивает автоматическое поддержание мощности привода вращателя при изменяющемся сопротивлении бурению. При работе установки (рис.214)
 Рис.214. Схема автоматического регулирования мощности привода в буровых установках
Рис.214. Схема автоматического регулирования мощности привода в буровых установках
|
величина потребляемой мощности поступает через трансформатор тока ТТ в устройство рассогласования Д. Здесь оно сравнивается с заданным номинальным режимом работы двигателя и поступает в блок формирования Ф. В зависимости от величины поступающего сигнала формирователь вырабатывает по принципу релейного трехпозиционного устройства одну из требуемых команд: «меньше», «равно», «больше».
Поступающие команды отраба-тываются электрогидравлическим исполнительным механизмом ИМ который управляет приводом подачи рабочего органа на забой, включающим гидростанцию ГС, гидроцилиндр ГЦ, лебедку Л.
Строительство тоннелей метрополитена, автотранспортных и водоотводных тоннелей, а также специальных тоннелей и штреков, особенно при встречнойих разработке и на криволинейных участках, требует абсолютной точности заданного направления проходки. При этом существенное значение имеют современные высокопроизводительные механизированные проходческие щитовые комплексы, реализующие повышенные скорости проходки. Однако, так как традиционные методы маркшейдерского обеспечения сдерживают опережающие темпы строительства, появилась необходимость в эффективном непрерывном контроле за положением, проходческого оборудования и его движением. Решекие этой задачи осуществляется различными методами, использующими лазерные приборы.
|
|
|
Наибольшее применение в тоннельном строительстве нашел метод установки лазерного прибора 1 и контрольных марок 3 на столбах или на стенах построенного участка тоннеля (рис.215). В этом случае лазерный пучок 2 проецируется на приемное устройство 5, закрепленное на проходческом щите 4. При этом он проходит две диафрагмы в контрольных марках, одна из которых расположена на стене, а другая на ближайшем к излучателю конце проходческого щита. Перед началом работы лазерный пучок проходит через две диафрагмы, положение которых определено геодезическим путем и соответствует продольной оси щита, и наводится на центр приемного устройства, находящегося на машине. При перемещении проходческого щита во время работы в заданном направлении пучок Должен попадать в центр приемного экрана, а при изменении направления подаются световые и звуковые сигналы и осуществляется корректировка работы машины. Возвращение движения машины на заданный курс производится либо машинистом путем включения корректирующего устройства, либо автоматически с помощью управляющей микро-ЭВМ.
|
|
|
