 |


Электрические позиционные регулирующие устройства. Назначение и принцип действия
|
|
|
|
К электрическим позиционным регуляторам и сигнализаторам относятся устройства, обеспечивающие замыкание или размыкание электрических цепей при достижении контролируемым параметром определённых, заранее заданных значений. Это самый широко распространенный тип регулятора. Причина популярности в его простоте при удовлетворительном качестве регулирования.
Сигнализаторы и позиционные регуляторы выполняют в виде отдельных устройств (аппаратные) или встраивают в показывающий или регистрирующий прибор для измерения температуры. Позиционные регуляторы - частный случай релейных. Наибольшее распространение в промышленности имеют двух- и трёхпозиционные регуляторы, выходная величина которых может принимать только два или три значения. Они наиболее просты по принципу действия и конструкции.
Регуляторы, в которых воспринимаемая (регулируемая) величина преобразуется в двухпозиционный выходной сигнал, называются регуляторами с двухпозиционными релейными характеристиками. Регуляторы, которые воспринимают неэлектрическую величину, а преобразуют ее в электрический выходной сигнал,— датчиками-реле. Выходным устройством датчиков-реле являются электрические контакты.
Обычно датчики-реле включают в электрические цепи управления таким образом, чтобы их контакты оставались замкнутыми, пока регулируемая величина имеет допустимые значения, и размыкались при её выходе за установленные пределы. Момент размыкания контактов называется прямым срабатыванием; значение регулируемой величины, при котором это происходит, - настройкой срабатывания или установкой прибора.
Для того чтобы контакты вновь замкнулись, т. е. чтобы произошло обратное срабатывание, регулируемая величина должна вернуться в установленные пределы. Значение, при котором это происходит, должно несколько отличаться от настройки срабатывания для преодоления трения и люфтов механизма движения, а также действия сопротивления узла настройки прибора.
|
|
|
Разность значений регулируемой величины между прямым и обратным срабатыванием называется зоной возврата или дифференциалом.
По типу срабатывания контактного устройства датчики-реле бывают двух видов: с прямым срабатыванием при понижении регулируемой величины (дифференциал направлен в сторону повышения относительно уставки), с прямым срабатыванием при повышении регулируемой величины (дифференциал направлен в сторону понижения относительно уставки).

Рис. () Диаграмма зависимости выходного сигнала управления регулятора от входного при понижении регулируемой величины (Тип 1), при повышении регулируемой величины (Тип 2).
Один из наиболее простых регуляторов такого вида - это милливольтметр гальванометрического типа, снабжённый приспособлением для обнаружения момента отклонения регулируемой переменной от заданного значения. Другим вариантом двухпозиционного электрического регулятора является детектор мостового типа. Заданное значение регулируемой переменной устанавливается перемещением подвижных контактов реостатов S1 и S2. Если регулируемая величина отклоняется от заданного значения, то возникает разбаланс моста, что приводит к появлению напряжения на его диагонали, которое усиливается и управляет оконечным регулирующим органом.

Рис. (). Милливольтметр в качестве двухпозиционного электрического регулятора релейного действия:
1 - термопара; 2 - рамка милливольтметра; 3 - усилитель; 4 - флажок; 5 - катушка генератора колебаний; 6 - стрелка милливольтметра; 7 - индикатор задатчика.

Рис. (). Двухпозиционный электрический регулятор релейного действия мостового типа:
|
|
|
1 - усилитель; 2 - управление ползунками реостатов для изменения задания; 3 - термометр сопротивления (измеряющий температуру).
Датчики-реле широко применяют в холодильной технике для позиционного регулирования, сигнализации и защиты оборудования от недопустимого изменения следующих величин (параметров): уровня, давления, разности давлений, температуры.
Позиционные системы автоматического регулирования широко используются для управления технологическими процессами в различных отраслях промышленности. Их применяют при благоприятных динамических свойствах объекта управления (τ0/Т0 < 0,2) и «нежестких» требованиях к качеству процесса регулирования.
Рис. (). Статистическая характеристика двухпозиционного регулятора.
Параметрами настройки двухпозиционного регулятора служат:
1) ширина зоны возврата (∆В);
2) величина управляющего воздействия (Uminp, Umaxp).
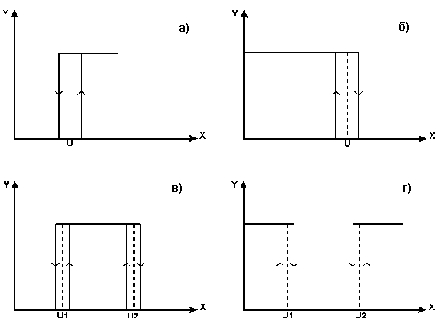
Рис. () Виды двухпозиционных регуляторов
Вид а) применяется для вентиляции, в холодильниках и пр. Вид б) обычно применяется в различных нагревательных приборах, термошкафах, баках и т. п. Виды в) и г) применяются для сигнализации выхода системы на рабочий режим. Эти регуляторы ещё называют компараторами.
Трехпозиционные регуляторы применяются для управления сервоприводом, а также для регулирования микроклимата подогревателем и вентилятором. Четырехпозиционный регулятор применяют для улучшения точности регулирования.
Рис. (). Статистическая характеристика трёхпозиционного регулятора.
У трехпозиционного регулятора параметрами настройки являются:
1) зона нечувствительности (∆нч);
2) зоны возврата (∆В,∆В/);
3) величина управляющего воздействия (Uminp, Umaxp, Uномp).
Процесс регулирования в двухпозиционных системах носит колебательный характер, в трехпозиционных системах данный режим работы наблюдается в тех случаях, когда регулируемый параметр выходит за пределы зоны нечувствительности регулятора.
Качество процесса регулирования в двухпозиционных системах регулирования оценивается:
1) амплитудой колебаний регулируемого параметра;
2) периодом колебаний регулируемого параметра или частотой переключений регулятора;
|
|
|
3) смещением среднего значения автоколебаний (оси колебаний) относительно заданного значения регулируемого параметра.
Данные показатели качества регулирования зависят от свойств объекта управления (запаздывания, инерционности) и параметров настройки регулятора. Анализ работы позиционной САР показывает, что уменьшение ширины зоны возврата уменьшает амплитуду колебаний регулируемого параметра, но увеличивает частоту переключений регулятора. Уменьшение величины управляющего воздействия уменьшает амплитуду колебаний и уменьшает частоту переключений регулятора, т.е. улучшает оба показателя качества процесса регулирования, но величина управляющего воздействия должна выбираться таким образом, чтобы она могла компенсировать максимально возможное возмущение, действующее на объект.
Обычно данная величина выбирается с запасом

где К0 – коэффициент передачи объекта по управляющему каналу; КВ – коэффициент передачи объекта по возмущающему каналу; fmax – величина максимального возмущающего воздействия.

Рис. () Процессы регулирования САР с Т-законом.
При определении величины управляющего воздействия рекомендуется вначале найти ее номинальное значение Uномp, при котором регулируемый параметр равен своему заданному значению, а затем в соответствии с данным выражением выбрать положительное (Umaxp) и отрицательное (Uminp) приращение управляющего воздействия.
|
|
|
