 |


Этапы выполнения курсового проекта
|
|
|
|
Южно-Уральский государственный университет
Кафедра систем управления
62-83(07)
П442
Т.К. Подлинева
Проектирование управляемого привода
В электромеханических системах
Учебное пособие по курсовому проектированию
Челябинск
Издательство ЮУрГУ
УДК [681.513.3:62-83](076.5)+62-83-52(076.5)
Подлинева Т.К. Проектирование управляемого электропривода: Учебное пособие. – Челябинск: Изд. ЮУрГУ, 2005. – 60 с.
Учебное пособие содержит сведения, достаточные для выполнения курсового проекта по дисциплине “Системы автоматизации и управления”. Выполнение курсового проекта состоит из проектирования управляемого электропривода для предложенного объекта управления в соответствии с техническим заданием и исследования разработанного привода с использованием известных систем моделирования для динамических систем, описываемых структурными схемами или дифференциальными алгебраическими уравнениями.
Пособие предназначено для студентов специальностей 23010265, 16040365, образовательных направлений 22020062 и 22010062.
Ил. 15, табл. 14, список лит. – 40 назв.
Одобрено учебно-методической комиссией
приборостроительного факультета.
Рецензенты: А.А. Кощеев, М.Ю. Катаргин.
© Издательство ЮУрГУ, 2005
ПРЕДИСЛОВИЕ
Управляемый электропривод получил широкое применение во всех сферах жизни и деятельности общества от промышленного производства до бытовой техники. Широта применения определяет исключительно большой диапазон мощностей электроприводов (от долей ватта до десятков тысяч киловатт) и значительное разнообразие их исполнения. В управляемом электроприводе нашли применение и получили развитие основные достижения современной техники управления.
|
|
|
Учебное пособие содержит техническое задание на проектирование управляемых электроприводов постоянного тока для объекта управления – промышленного робота с тремя степенями подвижности и двумя видами движения: поступательным и вращательным. В пособии даются рекомендации по выбору двигателей, передаточных чисел редукторов, информационных элементов, синтезу систем управления приводами и определению их качественных показателей.
В приложении приведены основные технические данные некоторых серий электродвигателей и информационных элементов, варианты технического задания на проектирование. В библиографическом списке рекомендована справочная и учебная литература по этапам курсового проектирования.
1. ТЕХНИЧЕСКОЕ ЗАДАНИЕ (ТЗ) НА ПРОЕКТИРОВАНИЕ УПРАВЛЯЕМОГО ЭЛЕКТРОПРИВОДА
ЦЕЛЬ: разработать электропривод, предназначенный для программного управления угловым или линейным перемещением промышленного робота-манипулятора по одной из трех степеней подвижности.
Исходные данные
1. Конструктивная схема (рис.1.1) промышленного робота (ПР) с грузоподъемностью от 10 до 30 кг, используемого в сборочных операциях в автомобильной промышленности. ПР – автоматическая стационарная машина, имеющая исполнительный механизм (манипулятор) с тремя степенями подвижности. Два механизма поворота, расположенные в шарнирах 1 и 2, осу-ществляют программные повороты j1(t), j2(t) вокруг вертикальных осей (1—1 и 2—2 соответственно), механизм подъема 3 осуществляет поступательное перемещение С3(t) объекта манипулирования, зажатого в захватывающем механизме 4. В механизме подъема 3 использована зубчато-реечная передача с зубчатой рейкой 5 и зубчатой шестерней 6.
2. Перемещения по степеням подвижности осуществляются последовательно, начиная с перемещения j1(t ).
|
|
|
3. Силовые модули 3-х индивидуальных приводов промышленного робота (см. рис. 1.1) сосредоточены в центрах масс шарниров 1 (1-й привод), 2 (2-й привод) и механизма подъема (3-й привод). Центр тяжести груза (объекта манипулирования) совпадает с центром приведения масс захватывающего механизма 4.
4. Виды индивидуальных управляемых приводов:
по координате j1(t) – программный, типа “угол – угол”;
по координате j2(t) – программный, типа “угол – угол”;
по координате C3(t) – программный, типа “напряжение – линейное перемещение”.
5. Описание и параметры программных траекторий рабочих циклов приводов приведены на рис. 1.2 – 1.7.
6. Масса зубчатой рейки mp, минимальное mmin и максимальное mmax значения массы груза вместе с массой захватывающего механизма.
7. Длина звеньев манипулятора l1 и l2 (см. рис. 1.1).
8. Массы звеньев m1 и m2.
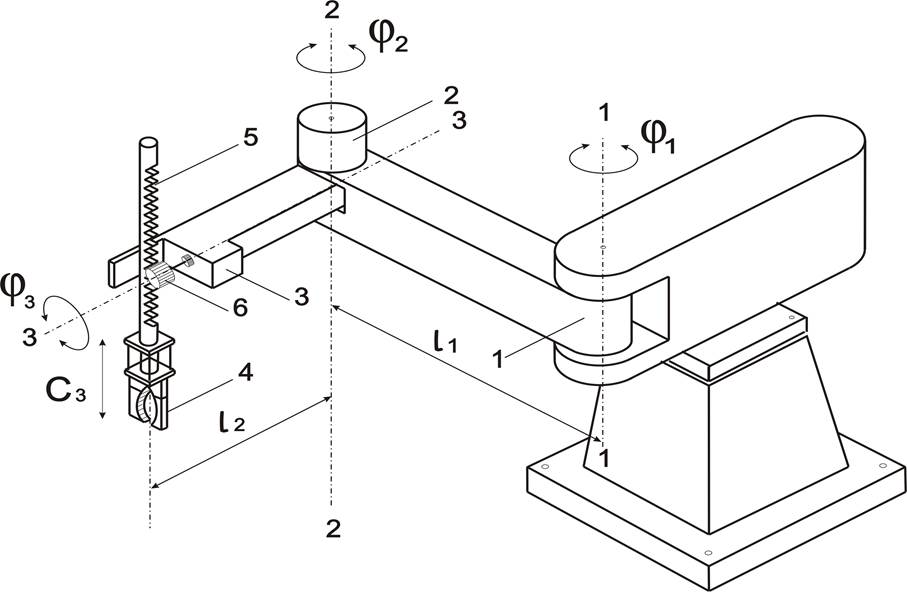
Рис 1.1. Конструктивная схема промышленного робота
9. Расстояние от центров масс звеньев до соответствующих шарниров r1 и r2.
10. Динамические моменты инерции J1 и J2 первого и второго звеньев относительно вертикальных осей, проходящих через их центры масс. Максимальный J3max и минимальный J3min динамические моменты инерции третьего звена: зубчатой рейки с захватывающим механизмом и грузом.
11. Коэффициент вязкого трения Квт.
12. Момент сухого трения Мо.
13. КПД редуктора h.
14. Передаточное отношение зубчато-реечной передачи iрп.
15. Параметры усилителя мощности kу, Tm.
16. Статическая ecт и динамическая eд допустимые погрешности привода.
17. Прямые показатели качества: перерегулирование s и время переходного процесса tпп.
Числовые значения исходных данных для расчета управляемого привода приведены в табл. П. 3.1 – П. 3.3 приложения 3.






Рис. 1.2. Первая из двух возможных траекторий
рабочего цикла для первого привода
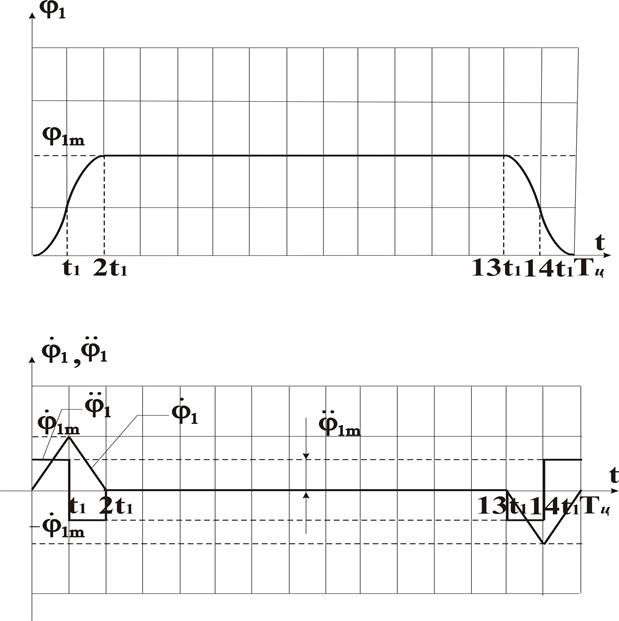






Рис. 1.3. Вторая из двух возможных траекторий
рабочего цикла для первого привода
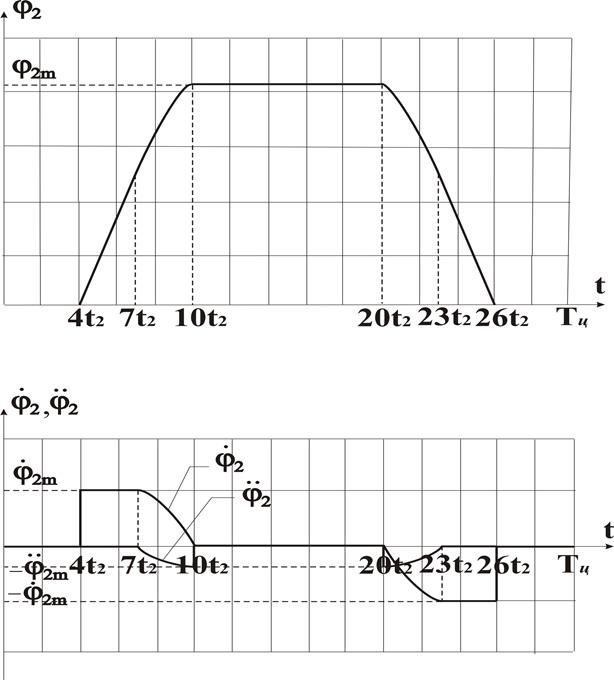






Рис. 1.4. Первая из двух возможных траекторий
рабочего цикла для второго привода
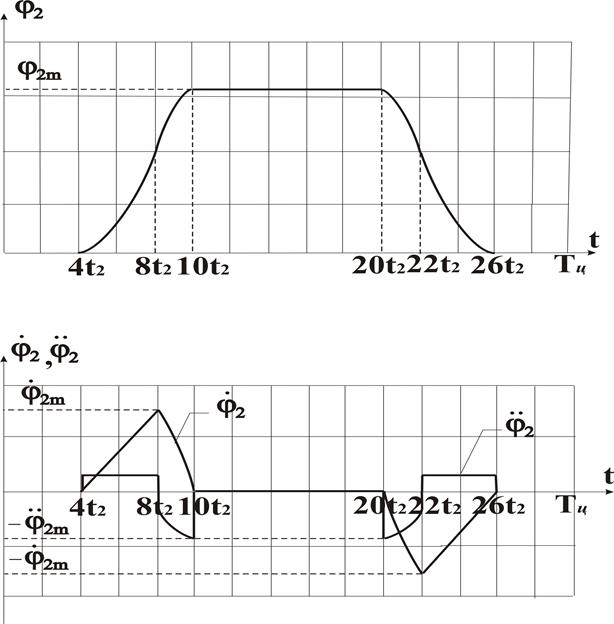





Рис. 1.5. Вторая из двух возможных траекторий
рабочего цикла для второго привода

|
|
|




Рис. 1.6. Первая из двух возможных траекторий
рабочего цикла для третьего привода






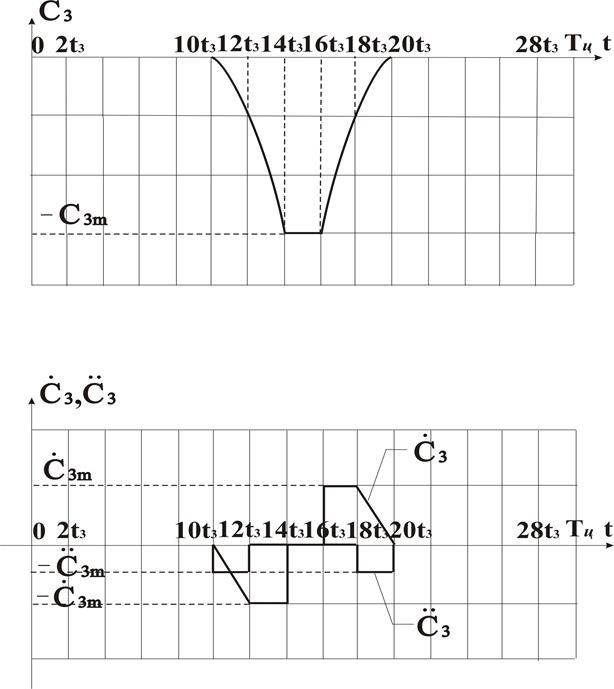
Рис. 1.7. Вторая из двух возможных траекторий
рабочего цикла для третьего привода
ЭТАПЫ ВЫПОЛНЕНИЯ КУРСОВОГО ПРОЕКТА
Первый этап. Энергетический расчет привода
1.1. Предварительно выбрать по мощности двигатели постоянного тока независимого возбуждения для двух возможных траекторий рабочего цикла проектируемого привода.
1.2. Выбрать передаточное число редуктора.
1.3. Проверить выбранные двигатели на нагрев.
1.4. Сравнить возможные траектории рабочего цикла по энергоемкости, требуемым элементам силового модуля, качественным параметрам и выбрать программную траекторию движения.
Оформление результатов расчета
В пояснительной записке к курсовому проекту необходимо в полном объеме воспроизвести все этапы энергетического расчета, обосновать выбор двигателя, редуктора и программной траектории движения.
Второй этап. Синтез системы управления электроприводом
2.1. Выбрать задатчик, датчик обратной связи, элемент рассогласования и оценить статическую погрешность электропривода.
2.2. Разработать функциональную схему привода.
2.3. По функциональной схеме, исходным данным и результатам энергетического расчета синтезировать структурную схему неизменяемой части управляемого привода.
2.4. Выбрать структуру регулятора, осуществив настройку привода на оптимум по модулю, с учетом особенностей объекта управления или воспользовавшись традиционным методом логарифмических амплитудных характеристик, если выше названный метод синтеза нельзя использовать.
2.5. Найти передаточные функции привода: по программному воздействию, ошибке, статическому моменту нагрузки Mн. Оценить статическую и динамическую точность синтезированного привода, используя полученные передаточные функции.
Оформление результатов расчета
В пояснительной записке необходимо:
2.1. Представить обоснование выбора элементов функциональной схемы проектируемого привода.
|
|
|
2.2. Провести все требуемые расчеты: структуры регулятора, передаточных функций спроектированного привода, статической и динамической его точности.
2.3. Результаты расчета показать на рисунках функциональной и структурной схем, логарифмических частотных характеристиках.
Третий этап. Моделирование спроектированного управляемого привода
3.1. Построить цифровую модель управляемого привода, используя программное обеспечение для систем, описываемых структурными схемами или дифференциальными уравнениями.
3.2. Исследовать статическую и динамическую точность привода при отработке типового ступенчатого воздействия, выбранной траектории движения нагрузки и сравнить результаты с требованиями технического задания.
3.3. Определить прямые показатели качества управляемого привода (перерегулирование, время переходного процесса) и подтвердить их соответствие требованиям технического задания на проектирование.
Оформление результатов расчетов
В пояснительной записке привести результаты исследования цифровой модели привода. Результаты подтвердить необходимыми расчетами и следующими рисунками:
3.1. Блок-схемы цифровой модели.
3.2. Реакциями цифровой модели на типовой ступенчатый сигнал при заданных моментах инерции нагрузки на двигатель.
3.3. Реакциями цифровой модели на программные задающие воздействия.
3.4. Привести расчеты статической и динамической точности, прямых показателей качества исследуемого привода.
Четвертый этап. Оформление расчетно-пояснительной записки
Расчетно-пояснительная записка оформляется в соответствии со стандартом предприятия [31] и должна содержать в соответствии с ГОСТ 2.106-68 следующие документы:
4.1. Титульный лист.
4.2. Техническое задание на проектирование, соответствующее варианту курсового проекта.
4.3. Аннотацию.
4.4. Содержание (оглавление).
4.5. Результаты расчетов по всем этапам работы.
4.6. Заключение по результатам проектирования и их соответствию требованиям технического задания (ТЗ).
4.7. Список использованной литературы.
4.8. Приложения.
Текст пояснительной записки (ПЗ) выполняется на одной стороне стандартных листов белой бумаги формата А4 (210х297) черной тушью, черной пастой, черными чернилами с высотой букв не менее 2,5 мм и цифр – 5 мм или набирается в редакторе Microsoft Word версии не менее 6.0. Параметры страницы: нижнее поле 2,6 см, верхнее – 2,0 см, левое – 2,5 см, правое – 1,0 см. Основное текст пособия набирается русифицированным шрифтом Times New Roman размером 14 пт с одинарным межстрочным интервалом. Красную строку абзаца набирают с отступом в 0,7 см.
|
|
|
Заглавным листом ПЗ считается содержание.
Текст ПЗ разделяется на разделы и подразделы. Заголовки разделов пишутся прописными буквами, размещаются симметрично по тексту, заголовки подразделов пишутся строчными буквами, начиная с абзаца 15...17 мм. Заголовки должны быть краткими и соответствовать содержанию. Каждому разделу присваивается номер, обозначаемый арабской цифрой, подразделу присваивается номер раздела и порядковый номер внутри раздела с точкой между ними, например: 2.1, 3.3. Расстояние между заголовками и последующим текстом должно составлять 10…15 мм. Такое же расстояние должно быть между последней строкой текста и последующим заголовком.
Условные буквенные обозначения математических, физических и других величин, а также сокращения слов в тексте должны соответствовать государственным стандартам. Размерности параметров пишутся буквами русского алфавита.
Иллюстрации, схемы и графики располагаются в ПЗ после первой ссылки на них, называют рисунками и нумеруют арабскими цифрами в пределах раздела. Рисунки могут иметь названия, выполняемые под рисунками рядом с их номером. Например: “Рис. 3.1. Функциональная схема управляемого привода”. Если на одном рисунке изображается несколько кривых, то они должны быть обозначены, а соответствующие пояснения сделаны под рисунком. При выполнении рисунков пользуются известными правилами чертежно-графических работ. Рисунки выполняются тушью или карандашом.
Формулы помещаются на отдельной строке, а не в строке текста. Нумеруются формулы арабскими цифрами последовательно в пределах раздела, номер указывают с правой стороны листа на уровне формулы и заключают в круглые скобки. Ссылки в тексте на порядковый номер формулы также даются в скобках.
Таблицы нумеруются последовательно в пределах раздела. Номер таблицы помещается над ней справа, например: “Табл. 2.2”, а заголовок таблицы располагается над таблицей симметрично по отношению к ней.
В приложении следует помещать тексты программ и те таблицы (распечатки), которые использованы для построения графиков в основном тексте. Каждое приложение нумеруется цифрами в правом верхнем углу, например, “Приложение 1” и ниже помещается заголовок приложения: “Реакция цифровой модели управляемого привода на типовое ступенчатое воздействие ”.
В конце основного текста ПЗ перед приложениями помещается список литературы, использованной при выполнении проекта. Литература записывается и нумеруется в порядке ее упоминания в тексте. Ссылки на литературу в тексте приводятся с указанием порядкового номера источника по списку, выделяемого квадратными скобками.
Нумерация листов ПЗ должна быть сквозной для текста и приложений и проставляется, начиная с содержания. Титульный лист, техническое задание и аннотация не нумеруются.
После проверки состава ПЗ, корректуры текста листы пояснительной записки брошюруются в книгу.
Пятый этап. Оформление конструкторской части проекта
В графической части курсового проекта должны содержаться следующие документы:
5.1. Конструктивная схема объекта управления промышленного робота.
5.2. Программные траектории изменения управляемой координаты объекта.
5.3. Функциональная и структурная схемы управляемого привода.
5.4. Результаты синтеза регулятора, продемонстрированные на логарифмических частотных характеристиках.
5.5. Блок-схема цифровой модели управляемого привода и результаты моделирования.
Графические документы подразделяются на чертежи и схемы. Чертежи – конструкторские документы, содержащие изображения изделия и другие данные, необходимые для его сборки. Схемы – графические документы, выполняемые без соблюдения масштаба, на которых показаны в виде условных изображений и обозначений составные части изделия и связи между ними.
Чертежи и схемы должны быть выполнены в соответствии с требованиями ЕСКД, ЕСТД.
ГОСТ 2.301-68 устанавливает основные и дополнительные форматы чертежей. Основной формат А0 – 841х1189 мм, другие форматы получаются делением основного:
А1 – 594х841, А2 – 420х594,
А3 – 297х420, А4 – 210х297.
На графическом документе наносится рамка, основная надпись, выполняемая по ГОСТ 2.104-68.
В Южно-Уральском государственном университете введён стандарт предприятия СТП ЮУрГУ 04-2001 [31], который устанавливает общие требования к курсовым проектам и правила их оформления. В нём можно найти детальные сведения и примеры оформления графических и текстовых документов, заполнения основной надписи, а также необходимые ссылки на Государственные стандарты.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Первый этап
Задачей работы на этом этапе является определение требуемых энергетических характеристик привода. В процессе решения задачи необходимо:
– проанализировать работу объекта управления и определить рабочие нагрузки на проектируемый привод;
– предварительно выбрать двигатель, ориентированный на рассчитанные нагрузки;
– выбрать передаточное число и необходимый тип редуктора, составить техническое задание на разработку редуктора, если предлагаемые в каталогах (серийно выпускаемые) редукторы не подходят по массогабаритным характеристикам;
– проверить выбранный двигатель на нагрев и, если проверка покажет нарушение нормального теплового режима, вернуться к выбору двигателя, увеличив его мощность или уменьшив динамический момент инерции.
|
|
|
