 |


Технические средства измерений.
|
|
|
|

Измерительный преобразователь – это устройство преобразования измерительной информации в форму удобную для передачи, обработки и хранения, но не поддающуюся восприятию наблюдателя.
Датчики физических величин.
1. последовательное включение

2. дифференциальное включение (параллельное) – дифференциальный трансформаторный датчик.


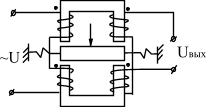
Помеха Q взаимокомпенсируется.
3. компенсационное включение (датчик с обратной связью)


 |
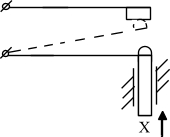
 Акселерометр. Ускорение приводит в движение, которое измеряется дифференциальным конденсатором, усиливается и в виде тока i подается в катушку, которая противодействует смещению.
Акселерометр. Ускорение приводит в движение, которое измеряется дифференциальным конденсатором, усиливается и в виде тока i подается в катушку, которая противодействует смещению.
 Чем больше k, тем меньше будет смещение. Далее i преобразуется в UВЫХ, как падение напряжения на R.
Чем больше k, тем меньше будет смещение. Далее i преобразуется в UВЫХ, как падение напряжения на R.
Классификация датчиков.
1. Датчики:
Аналоговые: параметрические - L
-R
-C
генераторные (ТП, датчики Холла, ТГ и т.д.)
Цифровые.
Частотные.
2. По виду сигнала.
Аналоговые непрерывные (т.е. имеют бесконечное множество значений выходного электрические сигнала). Они подвержены влиянию окружающей среды и помех – не точные.
Цифровые – конечное значение уровней сигнала (количество значений определяется разрядностью). Они имеют высокую точность и помехоустойчивость при большем количестве разрядов, но сложны в реализации.
Частотные – где выходной сигнал гармонические колебания (частота, либо период, либо сдвиг фазы). Имеют высокую как точность, так и помехоустойчивость.
Параметрические – изменяется какой либо параметр (R, L, C) поэтому для выходного сигнала им необходим измерительный преобразователь.
Генераторные – сами вырабатывают электрические сигналы (пример: термопара).
|
|
|
Датчик, его метрологические характеристики.
 |
X Y
1.  Х - входная величина, на которую настроен датчик.
Х - входная величина, на которую настроен датчик.
2. У – выходная величина.
3. Функция преобразования, может быть:
- аналитически в виде y = f(x)
- графически в виде графика y
 -таблично в виде таблицы.
-таблично в виде таблицы.
y
4. Чувствительность: S = Δy/Δx, Δy
если размерности входа и выхода разные, и
коэффициент усиления, если размерности равные. Δx
0 x
 Х
Х
5. Номинальная характеристика как усредненная y
характеристика.
Реальная характеристика отличается от номинальной
на величину равную погрешности.
у x
6.  Порог чувствительности Δо – это минимальное
Порог чувствительности Δо – это минимальное
изменение входного сигнала, вызывающее
минимальное изменение выходного сигнала
х
7. Диапазон измерения 0  ХН – это область значений измеряемой величины, для которой нормированы допустимые погрешности.
ХН – это область значений измеряемой величины, для которой нормированы допустимые погрешности.

8. Быстродействие – это время, которое затрачивается на измерение. Оно может выражаться через постоянную времени Т. 
9. Абсолютная погрешность. Δ = Х – А
10. Δ = У-Уном - абсолютная погрешность по выходу
У – реальное значение сигнала 
Уном - номинальное значение сигнала
y
11. δ = Δ / У относительная погрешность по выходу. реальная
12. γ= Δ / Уmax-Уmin приведенная погрешность по выходу.
Δy номинальная
0 t
Требования к датчикам.
1. Однозначность характеристик – отсутствие гистерезиса.
2. Минимальное влияние внешних факторов.
3. Высокая чувствительность.
4. Стабильность характеристик во времени.
5. Простота и технологичность конструкции.
6. Взаимозаменяемость.
7. Высокое быстродействие.
8. Удобство монтажа и обслуживания.
Принципы развития датчиков.
А) Разрабатываются на основе высоких технологий оптоэлектроники,
Б) используются новые физические принципы,
В) уменьшается масса и увеличивается точность,
Г) есть тенденции разработать интеллектуальный датчик, частотный датчик с нормированным выходом (0-5 мА, 0-20 мА, 4-20 мА),
|
|
|
Д) осуществляется связь со стандартной измерительной системой, где через монитор выдается информация.
Резистивные датчики.
Другое их название резистивные преобразователи.
Различают:
- контактные,
- реостатные,
- электролитические,
- тензодатчики.
Рассмотрим простейший контактные датчик:

Входная величина Х - перемещение
Выходная величина Y – сопротивление.
Конструкция простейших реостатных датчиков.
Это может быть проволочное сопротивление.
Скользящий контакт.


На каркас наматывается проволка (нихром, константан, манганин, фехраль).
Входная величина Х - перемещение
 Выходная величина Y – сопротивление.
Выходная величина Y – сопротивление.
Подвижный контакт на оси.
Входная величина Х – угловое перемещение
Выходная величина Y – сопротивление
Если не проволочное сопротивление, то используют резистивную полоску и скользящий контакт.
 |
Схемы включения.
|
|
|
