 |


Механические, пусковые характеристики СД. Условия устойчивой работы СД.
|
|
|
|
Ответ: Принцип действия синхронного двигателя. Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя. Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток  . Ток , как и в генераторе, создаёт МДС F ст, а она – потоки Ф d и Фр,я, наводящие в обмотке статора ЭДС
. Ток , как и в генераторе, создаёт МДС F ст, а она – потоки Ф d и Фр,я, наводящие в обмотке статора ЭДС  и
и  .
.
По обмотке ротора протекает ток возбуждения I в, её МДС F в создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС  , которая направлена против напряжения сети
, которая направлена против напряжения сети  . Сумма ЭДС
. Сумма ЭДС 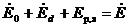 с учётом падения напряжения на активном сопротивлении обмотки статора
с учётом падения напряжения на активном сопротивлении обмотки статора  уравновешивает напряжение сети . Магнитные потоки Ф0, Ф d и Фр,я образуют результирующий магнитный поток двигателя Фрез.
уравновешивает напряжение сети . Магнитные потоки Ф0, Ф d и Фр,я образуют результирующий магнитный поток двигателя Фрез.
Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления М с. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6). В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора. В двигательном режиме синхронная машина потребляет из сети ток , который направлен навстречу ЭДС (рис.4.14, а).
|
|
|
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
 , (4.4)
, (4.4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что =0).
Векторная диаграмма синхронного двигателя. Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол  от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14, б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14, б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин .
Мощность и вращающий момент синхронного двигателя. Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности  .
.
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор  , где
, где  — угол сдвига фаз между током и ЭДС.
— угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок  , где
, где  —масштабный коэффициент. Подставляя значение I cos Ψ в выражение для Р эм, получаем для механической мощности на валу двигателя
—масштабный коэффициент. Подставляя значение I cos Ψ в выражение для Р эм, получаем для механической мощности на валу двигателя
 .
.
Механический момент на валу двигателя
 ,
,
(4.5)
где  — угловая скорость ротора; Мтах =
— угловая скорость ротора; Мтах =  — максимальный момент, развиваемый двигателем. При постоянном напряжении сети U c максимальный момент двигателя зависит только от ЭДС Е 0, т.е. от тока возбуждения ротора I в.
— максимальный момент, развиваемый двигателем. При постоянном напряжении сети U c максимальный момент двигателя зависит только от ЭДС Е 0, т.е. от тока возбуждения ротора I в.
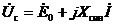
Угловая и механическая характеристики. Зависимость момента синхронной машины от угла нагрузки при U c = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды. В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°< <+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
|
|
|
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние. Так, в двигательном режиме при увеличении механической нагрузки М с ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что М с> Мmax, то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться. Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки  и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
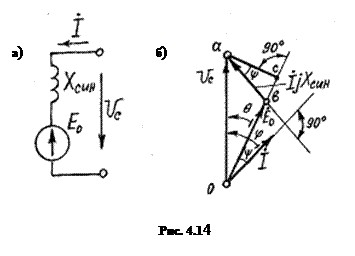
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
|
|
|
Регулирование коэффициента мощности синхронного двигателя. Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети. Когда двигатель работает при неизменной механической нагрузке на валу, т.е. М с= const при U c = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:

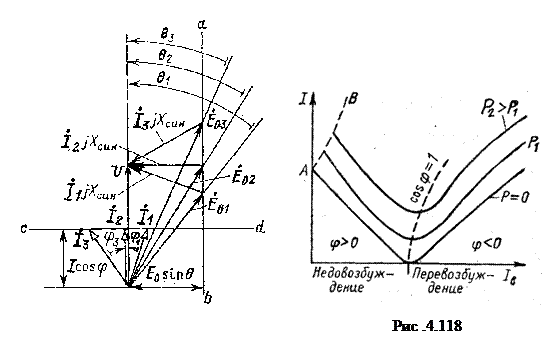
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статора и изменяются так, что активная составляющая тока I cos φ и составляющая ЭДС  остаются неизменными (рис. 14.17).
остаются неизменными (рис. 14.17).
При изменении тока возбуждения вектор скользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между током и напряжением сети , а, вследствие того, что  , конец вектора тока скользит по прямой cd.
, конец вектора тока скользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), =  , ток
, ток  отстаёт по фазе
отстаёт по фазе  от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =
от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения = 
 и ток
и ток  является чисто активным.
является чисто активным.
Наоборот, при перевозбуждении  и вектор тока
и вектор тока  опережает по фазе вектор напряжения ,
опережает по фазе вектор напряжения ,  , ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cos φ всей сети. Обычно синхронные двигатели работают с перевозбуждением при
, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cos φ всей сети. Обычно синхронные двигатели работают с перевозбуждением при  .
.
U – образные характеристики. Зависимости I(Iв) при U c = const и Р = const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р =0 (режим холостого хода), некоторой мощности P 1>0 P 2> P 1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем  , левые ветви – перевозбуждённому двигателю и ёмкостному току.
, левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения I в уменьшается ЭДС Е 0 и угол увеличивается  (рис.4.17).
(рис.4.17).
|
|
|
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с  , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
, так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cos φ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток  с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током I a (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока I p.
с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током I a (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока I p.
Синхронные компенсаторы. Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cos φ) электрической сети. Они работают без механической нагрузки на валу (ток I a мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р =0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током I p, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения U в (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
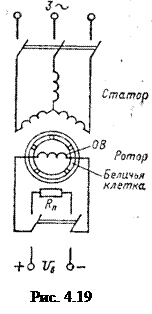 Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат R п, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n 0, пусковой реостат R потключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат R п, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n 0, пусковой реостат R потключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
|
|
|
Преимущества, недостатки и применение синхронных двигателей. Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cos φ всей сети. Кроме того, работа двигателя с высоким cos φ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети U c. Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Пуск СД. Способы пуска.
Ответ: Метод асинхронного пуска. Синхронный двигатель не имеет начального пускового момента.Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление, т. е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, так как его ротор, обладающий определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
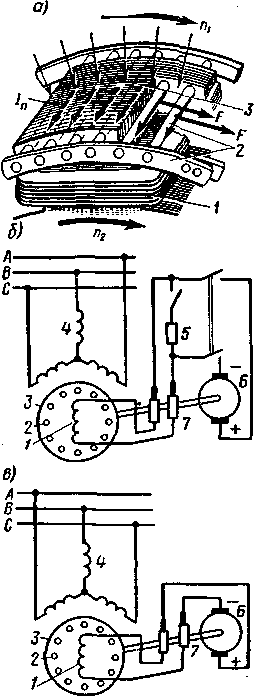
В настоящее время для этой цели применяют метод асинхронного пуска. При этом методе синхронный двигатель пускают как асинхронный, для чего его снабжают специальной коротко-замкнутой пусковой обмоткой, выполненной по типу «беличья клетка». Чтобы увеличить сопротивление стержней, клетку изготовляют из латуни. При включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле, которое, взаимодействуя с током I пв пусковой обмотке (рис. 6.48, а), создает электромагнитные силы F и увлекает за собой ротор. После разгона ротора до частоты вращения, близкой к синхронной, постоянный ток, проходящий по обмотке возбуждения, создает синхронизирующий момент, который втягивает ротор в синхронизм.
Применяют две основные схемы пуска синхронного двигателя. При схеме, изображенной на рис. 6.48, б,обмотку возбуждения сначала замыкают на гасящий резистор, сопротивление которого R до б превышает в 8 — 12 раз активное сопротивление R в обмотки возбуждения. После разгона ротора до частоты вращения, близкой к синхронной (при s ≈ 0,05), обмотку возбуждения отключают от гасящего резистора и подключают к источнику постоянного тока (возбудителю), вследствие чего ротор втягивается в синхронизм. Осуществить пуск двигателя с разомкнутой обмоткой возбуждения нельзя, так как во время разгона ротора при s > 0 в ней вращающимся магнитным полем индуцируется ЭДС Е в = 4,44 f 2 w вФ m = 4,4 f 1 sw вФ m , где f 2 = f 1 s — частота изменения тока в обмотке возбуждения; w в — число витков обмотки возбуждения; Ф m — амплитуда магнитного потока вращающегося поля.
|
| Рис. 6.48. Устройство пусковой обмотки синхронного двигателя (о) и схемы его асинхронного пуска (б и в): 1 - обмотка возбуждения; 2 - пусковая обмотка; 3 - ротор; 4 - обмотка якоря; 5 - гасящее сопротивление; 6 - якорь возбудителя; 7 - кольца и щетки |
В начальный момент пуска при s = 1 из-за большого числа витков обмотки возбуждения ЭДС Е вможет достигать весьма большого значения и вызвать пробой изоляции. При схеме, изображенной на рис. 6.48, в, обмотка возбуждения постоянно подключена к возбудителю, сопротивление которого по сравнению с сопротивлением R в весьма мало, поэтому эту обмотку в режиме асинхронного пуска можно считать замкнутой накоротко. С уменьшением скольжения до
s = 0,3 ÷ 0,4 возбудитель возбуждается и в обмотку возбуждения подается постоянный ток, обеспечивающий при s ≈ 0,05 втягивание ротора в синхронизм. Различие пусковых схем обусловлено тем, что не во всех случаях может быть применена более простая схема с постоянно подключенной к возбудителю обмоткой возбуждения (рис. 6.48, в), так как она имеет худшие пусковые характеристики, чем более сложная схема, приведенная на рис. 6.48,б. Главной причиной ухудшения пусковых характеристик является возникновение одноосного эффекта — влияние тока, индуцируемого в обмотке возбуждения при пуске, на характеристику пускового момента.
Одноосный эффект. Для анализа этого явления предположим сначала, что в двигателе отсутствует пусковая обмотка, а обмотка возбуждения замкнута накоротко. В результате при асинхронном пуске двигателя в обмотке возбуждения индуцируется ЭДС с частотой f 2 = f 1 s и по обмотке проходит переменный ток, создающий пульсирующее магнитное поле (обмотка возбуждения в этом случае является однофазной обмоткой переменного тока). Пульсирующее магнитное поле можно разложить на две составляющие: прямое и обратное вращающиеся магнитные поля ротора, которые характеризуются потоками Фпр и Фобр. Частота вращения каждого из этих полей относительно ротора
п р = ± 60 f 2/ р = ± 60 f 1 s / p = ± n 1 s.
Относительно статора прямое поле вращается с частотой
(6.46)
nр.пр = n2 + np = n1(1 - s) + n1s = n1,
где n2 = n1(1 - s) — частота вращения ротора.
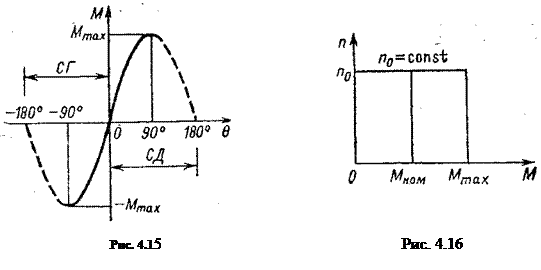
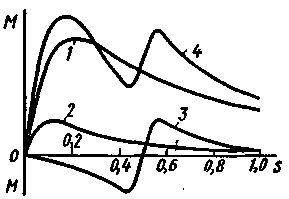
Следовательно, оно вращается синхронно с полем статора; образуемый этим полем с током статора электромагнитный момент М пр изменяется в зависимости от скольжения так же, как и в трехфазном асинхронном двигателе (рис. 6.49, кривая 2). Обратное поле ротора вращается относительно статора с частотой
(6.47)
пр.обр = n2 - n1 = n1(1 - s) - n1s = n1(1 - 2s).
При частотах вращения ротора n2 < 0,5n1, т. е. при s > 0,5, обратное поле, как видно из формулы (6.47), перемещается относительно статора в сторону, противоположную направлению вращения ротора; при n2 = 0,5n1, это поле неподвижно относительно статора; при n 2 > 0,5 (т. е. при s < 0,5) оно перемещается в ту же сторону, что и ротор.
|
| Рис. 6.49. Зависимость электромагнитного момента от скольжения при асинхронном пуске синхронного двигателя |
В обмотке статора обратным полем индуцируется ЭДС с частотой f1(1 — 2s), для которой обмотка статора является короткозамкнутой. При этом по обмотке статора проходит соответствующий ток. Взаимодействуя с обратным полем ротора, этот ток создает электромагнитный момент М о6р. Так как направление момента зависит от направления вращения поля n р.обр относительно статора, то из формулы (6.47) следует, что он является знакопеременным и изменение его направления происходит при s = 0,5 (рис. 6.49, кривая 3).
Таким образом, ток, индуцируемый в обмотке возбуждения при пуске двигателя, создает электромагнитный момент, который при частоте вращения, меньшей 0,5 n 1, является ускоряющим, а при большей частоте вращения — тормозящим.
Особенно резко проявляется действие обратного поля при n ≈ 0,5 n 1.
Наличие пусковой обмотки на роторе существенно уменьшает обратное магнитное поле и создаваемый им момент. Однако этот момент, складываясь с асинхронным моментом пусковой обмотки (кривая 1), создает в кривой результирующего пускового момента провал при частоте вращения, равной половине синхронной (кривая 4).Этот провал тем больше, чем больше ток в обмотке возбуждения. Очевидно, что включение гасящего сопротивления в цепь обмотки возбуждения (см. рис. 6.48, б) на период пуска уменьшает ток в этой обмотке и улучшает форму кривой пускового момента.
Следует отметить, что если обмотку возбуждения при пуске не отключить от возбудителя, то по якорю возбудителя в период пуска проходит переменный ток, что может вызвать искренне щеток. Поэтому такую схему пуска применяют в Случае небольшого нагрузочного момента — не более 50 % от Номинального, при сравнительно небольшой мощности двигателя.
|
|
|
