 |


6.3.2 Экспорт моделей по разделам – передача в Navisworks
|
|
|
|
6. 3. 2 Экспорт моделей по разделам – передача в Navisworks
Целью экспорта моделей по разделам является получение составных файлов для последующей их передачи в Navisworks и получения сводной модели.
Для передачи BIM-моделей из Revit в Navisworks рекомендуется использовать следующие способы:
· прямой экспорт в формат NWC;
· импорт в Navisworks самого файла проекта Revit с расширением RVT;
· создание файлов NWD пакетным способом.
Для обеспечения обновления сводной модели при изменениях моделей по разделам, повторный экспорт из Revit следует выполнять без изменения имени составных файлов.
Более детальное описание экспорта описано в Приложения Е, п. 2 «Экспорт моделей по разделам – передача в Navisworks»
6. 3. 3 Создание сводной модели
Целью создания сводной модели является объединение нескольких моделей по разделам в одну единую с последующей проверкой на коллизии между ее элементами.
Сводную модель следует создавать последующей загрузкой составных файлов, полученных экспортом из Revit моделей по разделам (см. Приложение Е, п. 3 «Создание сводной модели»).
6. 3. 4 Матрица коллизий
Матрица коллизий представляет в табличной форме определение групп элементов, которые будут проверяться между собой на предмет пересечений. Пример матрицы коллизий отображен на рис. 10.
Целью создания матрицы коллизий является предварительное определение групп элементов, которые будут проверяться на наличие коллизий между собой.
Матрицу коллизий следует формировать в соответствии с приоритетами проверок (см. Приложение Е, п. 4. 1 «Матрица коллизий»).
Приоритетность проверок может меняться в зависимости от конкретного проекта и его задач.
Содержание матрицы коллизий и ее окончательный вид для конкретного проекта следует определить в Плане реализации BIM-проекта (BEP).
|
|
|
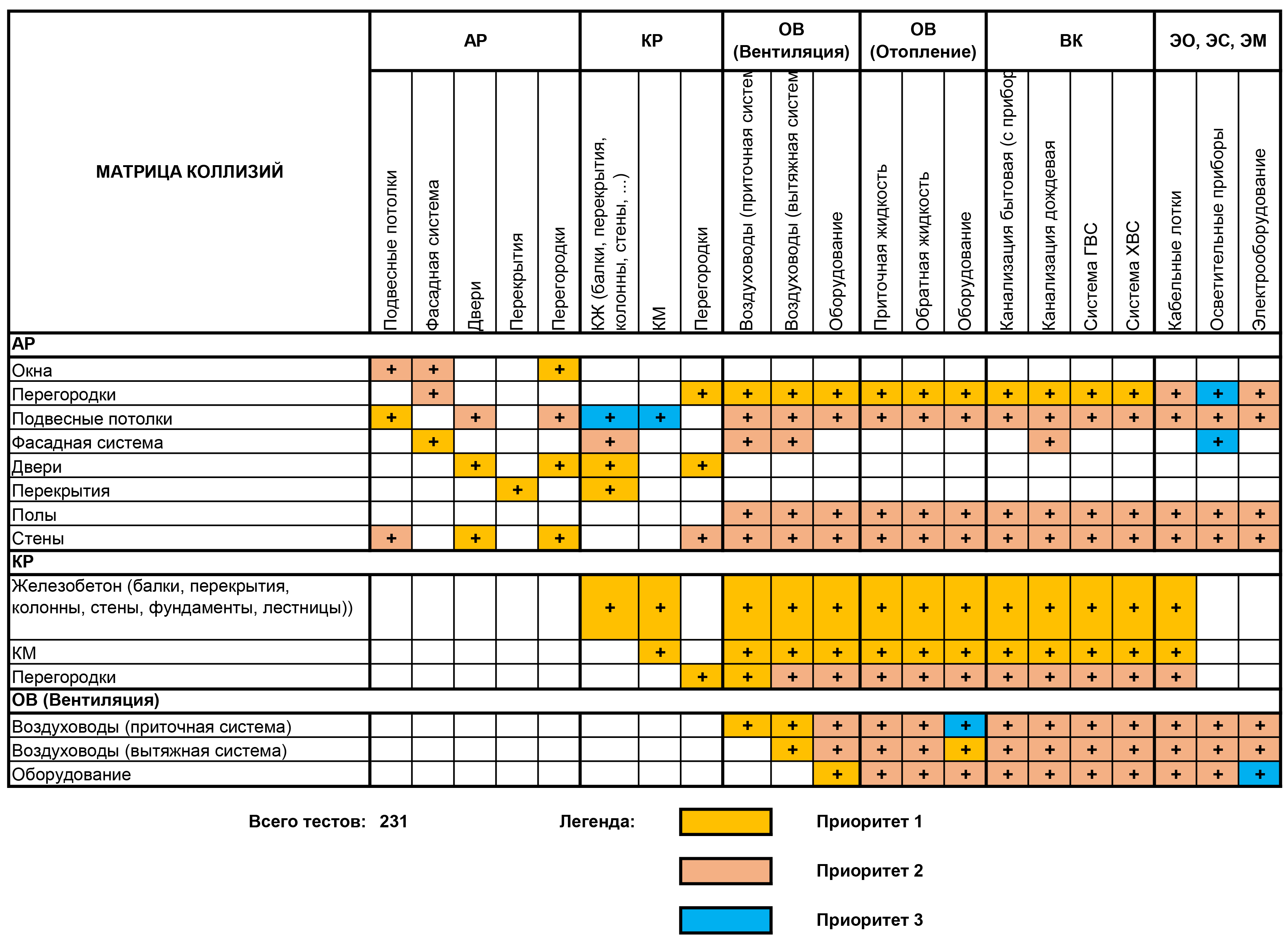
Рис. 10. Пример матрицы коллизий
6. 3. 5 Создание наборов выделенных элементов и поисковых наборов
Целью создания наборов является подготовка модели для автоматизированной проверки на наличие коллизий.
Наборы выделенных элементов и поисковые наборы следует создавать на основе матрицы коллизий по процедуре, описанной в Приложение Е, п. 4. 2 «Создание наборов выделенных элементов и поисковых наборов».
Для автоматизированной проверки рекомендуется использовать интеллектуальные поисковые наборы.
Созданные наборы рекомендуется экспортировать в отдельный файл для повторного применения в похожих проектах.
6. 3. 6 Визуальная проверка на коллизии
Целью визуальной проверки является выявление коллизий, которых нельзя определить автоматизированной проверкой.
Визуальную проверку следует выполнять обходом модели с использованием инструментов навигации, сечения и измерения.
Найденные коллизии следует документировать, используя инструменты рецензирования, см. Приложение Е, п. 5. 2 «Документирование выявленных коллизий».
Результатом визуальной проверки является отчет по визуальной проверке, см. Приложение В, табл. В. 3.
Примечание: При обходе необходимо учесть, что он выполняется в перспективной проекции и при использовании инструмента ВернутьНазад (SwitchBack) в Revit будет создан соответствующий вид камеры (перспективная проекция), который не является рабочим. Прежде чем запустить инструмент ВернутьНазад, рекомендуется переключить вид из перспективной проекции в ортогональную, чтобы элемент был максимально быстро позиционирован в Revit. Если необходимость в использовании инструмента ВернутьНазад возникла при обходе/облете объекта, для переключения в ортогональную проекцию необходимо предварительно отключить режим обхода/облета.
|
|
|
6. 3. 7 Автоматизированная проверка на коллизии
Целью автоматизированной проверки является ускорение выявления большого количества коллизий в сводной модели с использованием инструмента поиска коллизий в Navisworks Manage.
При определении элементов для проверки, рекомендуется использовать интеллектуальные, поисковые наборы, а также наборы выделенных элементов.
Автоматизированную проверку рекомендуется выполнять согласно процесса, отображенного на рис. 11.

Рис. 11. Процесс автоматизированной проверки на коллизии
Процесс автоматизированной проверки состоит из:
· создания проверки;
· выбора элементов для проверки;
· определения условий и параметров проверки;
· запуска проверки;
· создания отчетов по коллизиям.
Более детальное описание процессов, входящих в состав автоматизированной проверки на коллизии находится в Приложении Ж.
Созданные проверки рекомендуется сохранить в виде отдельного файла для повторного применения в похожих проектах.
Результаты проверки следует документировать в виде отчета по коллизиям и сводного отчета, см. Приложение В, таблицы В. 1 и В. 2.
|
|
|
