 |


Кинематическая схема системы подвижного упора управления СПУУ-52-4
|
|
|
|
Рис. 1
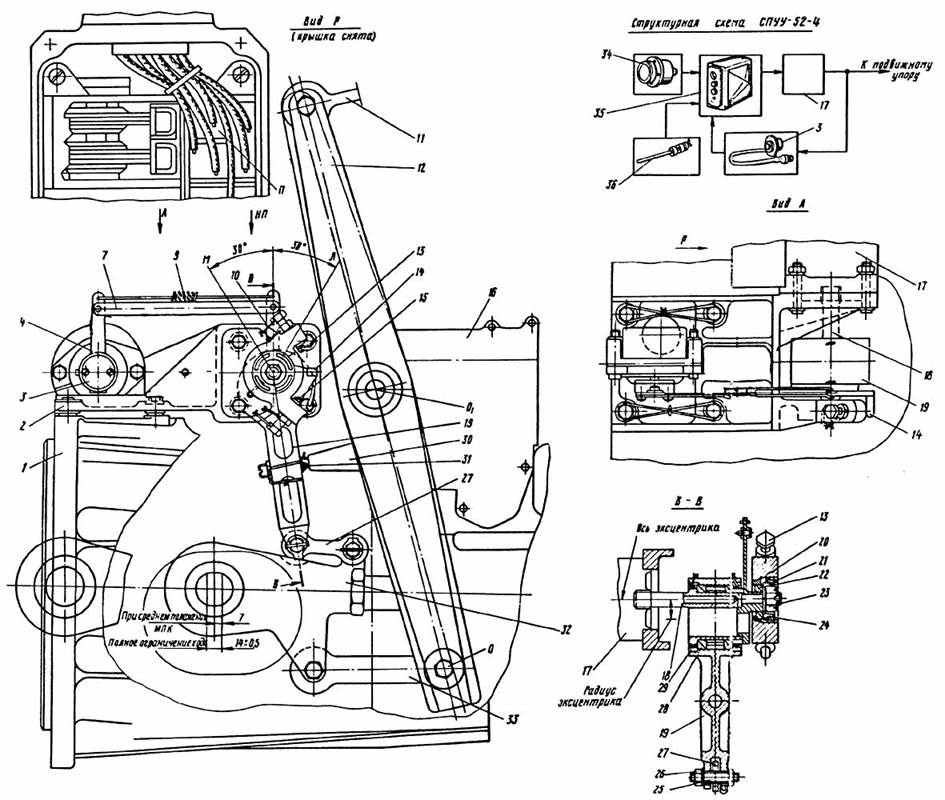
| 1. | Кронштейн крепления КАУ-140 |
| 2. | Кронштейн агрегатов |
| 3. | Датчик обратной связи (ДОС 6С25.53.000-1) |
| 4. | Поводок |
| 7. | Тяга |
| 9. | Пружина |
| 10. | Поводок |
| 11. | Тяга путевого управления |
| 12. | Золотниковая качалка |
| 13. | Болт-упор (дпя φмакс = 20°) |
| 14. | Упор |
| 15. | Болт-упор (для φмакс = 24°) |
| 16. | Комбинированный агрегат управления КАУ-140-01 |
| 17. | Электромеханизм МПК-13А-5 |
| 18. | Эксцентрик |
| 19. | Рычаг |
| 20. | Обойма |
| 21. | Гайка |
| 22. | Шарикоподшипник |
| 23. | Гайка |
| 24. | Сферическое кольцо |
| 25. | Болт |
| 26. | Шаровой подшипник |
| 27. | Звено |
| 28. | Шарикоподшипник |
| 29. | Гайка |
| 30. | Упор |
| 31. | Подвижный упор |
| 32. | Силовой шток КАУ-140-01 |
| 33. | Тяга |
| 34. | Датчик давления ИКД-27Да-400-830 |
| 35. | Блок управления БУ-32 |
| 36. | Датчик температуры П1 |
Система подвижного упора управления СПУУ-52-4
Рис. 2
| 3. | Работа Команда на изменение положения подвижного упора 31 в зависимости от изменения давления и температуры наружного воздуха поступает в электромеханизм 17 от блока управлении 35, суммирующего сигналы датчиков давления 34, температуры 36 и обратной связи 3. Когда сигнал с датчика обратной связи 3 скомпенсирует сигналы датчиков температуры и давления, просуммированные в блоке 35, электромеханизм 17 отключается. При включении электромеханизма 17 его выходной вал поворачивает эксцентрик 18 и перемещает рычаг 19 с подвижным упором 31, ограничивая перемещение штока агрегата 16. При перемещении педалей золотниковая качалка 12 вначале поворачивается вокруг оси "О" и смещает золотник, после чего начинает перемещаться шток 32 рулевого привода, а золотниковая качалка 12 дальше начинает поворачиваться вокруг оси "О1". При перемещении левой педали вперед до упора ход проводки управления ограничен ходом штока 32 агрегата на выпуск. В этом случае максимальный угол отклонения лопастей рулевого винта является постоянным и равен -11°25'. При перемещении правой педали вперед ограничение перемещения штока 32 рулевого привода на уборку происходит следующим образом. Шарнирно связанное со штоком звено 27 поворачивает рычаг 19, нажимает на упор 30, связанный с золотником агрегата 16 и переводит золотник в среднее положение. Шток 32 при этом останавливается. При изменении температуры и давления наружного воздуха меняется угол поворота вала электромеханизма 17 и связанного с ним эксцентрика 18. Угол поворота механизма 17 ограничен упорами 13 и 15. Упор 15 соответствует углу φмакс = 24°, упор 13 – углу φмакс = 20°. Если педали неподвижны, а силовой шток 32 комбинированного агрегата управления перемещается по сигналу автопилота, то ограничение хода штока 32 происходит так же, как и на режиме управления летчиком при помощи перемещений педалей. |
|
|
|
СИСТЕМА ПОДВИЖНОГО УПОРА УПРАВЛЕНИЯ СПУУ-52-4 –
ТЕХНОЛОГИЯ ОБСЛУЖИВАНИЯ
Настоящая технология обслуживания включает в себя следующие технологические карты:
1) Регулирование механизма СПУУ-52-4.
| 65.45.00 1 октября 2000 г. Стр. 501 | К РО | ТЕХНОЛОГИЧЕСКАЯ КАРТА | На страницах 501, 502 | РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ Ми-26Т | ||
| Пункт РО | Наименование работы: | Регулирование механизма СПУУ-52-4 | ||||
| Содержание операции и технические требования (ТТ) | Работы, выполняемые при отклонениях от ТТ | Конт-роль | ||||
| ВНИМАНИЕ. НЕ ДОПУСКАЕТСЯ ВКЛЮЧЕНИЕ ЭЛЕКТРОМЕХАНИЗМА МПК-1ЗА-5 ПРИ ВЫКЛЮЧЕННОЙ ГИДРОСИСТЕМЕ. 1. Включите источники постоянного и переменного тока и основную гидросистему (см. 29.00.00). 2. На панели блока БУ-32, установленного на центральном пульте в кабине летчиков, ручкой центровки при нажатой кнопке-табло переместите поводок 10 (см. рис. 2) в положение "Л" (положение "Л" регулируйте упором 15). 3. Уберите педалями шток гидроусилителя полностью до собственного упора. 4. Придерживая качалку 12 гидроусилителя, начните вывинчивать упор 31 до начала страгивания штока 32, после чего упор 31 вверните на 1/2 оборота и законтрите гайкой. Момент затяжки контргайки упора 1,6 ± 0,3 кгс·м. Гайку законтрите проволокой КО 0,8. 5. Проверьте ход ограничения штока гидроусилителя путем перемещения поводка МПК-13А-5 из положения "Л" в положение "М" с одновременным придерживанием качалки 12. Ход ограничения должен быть 14 ± 0,5 мм. Он обеспечивается изменением угла 60° поворота поводка 10 за счет регулирования упоров 13 и 15. Примечания: 1. Положение "М" регулируйте упором 13. 2. Шток гидроусилителя перед началом проверки должен быть убран полностью до собственного упора. 6. Произведите регулировку кулачка микровыключателя П (см. рис. 2, вид Р) электромеханизма МПК-13А-5 в следующем порядке: а) отвинтите винты крепления крышки "ДОСТУП К КУЛАЧКАМ" и снимите крышку; | ||||||
|
|
|
 65.45.00
Стр. 502 1 октября 2000 г. 65.45.00
Стр. 502 1 октября 2000 г.
| Содержание операции и технические требования (ТТ) | Работы, выполняемые при отклонениях от ТТ | Конт-роль | РУКОВОДСТВО ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ Ми-26Т | ||
| б) поверните одну половину кулачка с помощью ключа (черт. 90-9102-3170) в сторону увеличения или уменьшения продолжительности замкнутости цепи так, чтобы срабатывание микровыключателя П происходило, когда поводок 10, перемещаясь из положения "Л", не дошел до положения "М" на 2-3°, что соответствует зазору 1-1,6 мм между болтом-упором 13 и упором 14. Примечание. Поворот выходного вала электромеханизма на 1° соответствует повороту кулачка на 1°; в) проверьте регулировку кулачка путем замера щупом зазора между упором 14 и болтом-упором 13. При величине зазора в пределах 1-1,6 мм должно загореться желтое табло сигнализации "УПОР СПУУ", расположенное на центральной приборной доске летчиков, а при величине зазора более 1,6 мм - табло не должно гореть; г) установите крышку "ДОСТУП К КУЛАЧКАМ", законтрите и опломбируйте винты ее крепления. ВНИМАНИЕ: 1. КОЛИЧЕСТВО РЕГУЛИРОВОК КУЛАЧКОВ МЕХАНИЗМА МПК-13А-5 ОГРАНИЧЕНО (см. паспорт механизма). 2. ПО ОКОНЧАНИИ РЕГУЛИРОВКИ КУЛАЧКОВ МПК-13А-5 СДЕЛАЙТЕ ОТМЕТКУ В ПАСПОРТЕ МЕХАНИЗМА. 7. Отклонение поводков ДОС и МУ-615 достигается за счет изменения радиусов. | ||||||
| Контрольно-проверочная аппаратура (КПА) | Инструмент и приспособления | Расходные материалы | ||||
| Ключ тарированный до 2 кгс·м Набор щупов № 2 (№3) | Плоскогубцы комбинированные Отвертка L = 150 мм Линейка L = 500 мм Ключи: S=8 S = 10 Ключ специальный 90-9102-3170 | Проволока контровочная КО 0,8 | ||||
|
|
|
СХЕМА ЭЛЕКТРИЧЕСКАЯ ПРИПЦИПИАЛЬНАЯ СПУУ-52-4 –
ОПИСАНИЕ И РАБОТА
| 1. | Описание Схема электрическая принципиальная предназначена для обеспечения работы системы и функциональных связей агрегатов. В систему СПУУ-52-4 входят (рис. 1): блок управления БУ-32 (ЭН110), датчик температуры ДТ (ЭН120), датчик давления ДД (ЭН118), датчик обратной связи ДОС (ЭН137). Кроме того, на вертолете установлен контрольный штепсельный разъем ШРКЗ на правой стенке центрального пульта летчиков, электромеханизм МПК-13А-5 (ЭН136), реле ТКЕ26П1Г (Р101), расположенные в РК-1 центрального пульта летчиков, выключатель В70 (ВГ-15К-2С) "ПОДВИЖН. УПОРЫ" на центральном пульте летчиков и желтое табло сигнализации "УПОР СПУУ", расположенное на центральной приборной доске летчиков, работающие с этой системой. | |||
| 1.1. | Основные технические данные: | |||
| Напряжение питания постоянного тока: | ||||
| · основной источник....................………………………….. | 27 ± 2,7 В | |||
| · резервный источник....................………………………... | 27 ±.2,7 В | |||
| Напряжение питания переменного тока...........……................ | 36  В В
| |||
| Частота переменного тока.......................................……….….. | 400 ± 8 Гц | |||
| Напряжение питания ламп подсвета.....................………........ | не более 6 В | |||
| Потребляемые токи: | ||||
| · от источников постоянного тока: | ||||
| § в длительном режиме.............…………………...…. | не более 0,3 А | |||
| § основного кратковременно.....…………………...…. | не более 2,3 А | |||
| § резервного.................................…………………….. | не более 0,1 А | |||
| · от источника переменного тока....................………….. | не более 0,3 А | |||
| · от источника напряжения подсвета............…………… | не более 0,2 А | |||
| 2. | Работа Питание системы СПУУ-52 осуществляется постоянным и переменным током. Питание постоянным током напряжением 27 В поступает от аккумуляторной шины 1 и шины ВУ через предохранители Пр43 (ПМ-2) и Пр46 (ПМ-5). Переменный однофазный ток напряжением 36 В частотой 400 Гц подается от шин трансформатора А и В через предохранители Пр53 (ПМ-2). Лампа подсвета шкалы блока БУ-32 получает питание от трансформатора системы красного подсвета через контакт 10 ШР блока БУ-32. |
|
|
|
| При выключенной системе СПУУ-52-4 загорается красная кнопка-лампа на лицевой панели блока БУ-32, получая питание от аккумуляторной шины 1 через предохранитель Пр43 и контакт 9 ШР блока БУ-32. Включение системы производится выключателем В70. При его включении срабатывает реле Р101, которое через контакты 2-3 подает питание от шины ВУ в блок БУ-32 на контакт 2 его ШР и в датчик давления ДД через контакт 1 его ШР. В блоке БУ-32 срабатывает цепь контроля наличия питания, кнопка-лампа гаснет и система готова к работе. При изменении температуры t и давления p наружного воздуха сигналы от датчиков ДТ и ДЦ поступают в блок БУ-32 через клеммы 11 и 12 его ШР. В блоке эти сигналы алгебраически суммируются и подаются с контактов 7 или 8 ШР на контакты 15-14 или 18-17 реле Р101 и далее на контакты 7 или 8 ШР исполнительного электромеханизма ЭМ. Сигнал в электромеханизме ЭМ поступает на соответствующую обмотку его электродвигателя и вращает выходной вал в соответствующую сторону. При вращении выходной вал перемещает упор и одновременно поворачивает вал датчика обратной связи ДОС до тех пор, пока сигнал от него через контакт 13 ШР блока БУ-32 не скомпенсирует суммарный сигнал датчиков температуры ДТ и давления ДД. В случае поворота выходного вала электромеханизма в крайнее левое положение срабатывает микровыключатель электромеханизма. Микровыключатель выключает электромеханизм ЭМ и включает сигнальное табло желтого цвета "УПОР СПУУ" (Л63) на средней панели приборной доски летчиков. Питание на лампу табло поступает от шины ВУ через предохранитель Пр-46, контакт 5 ШР электромеханизма и корпус вертолета. Выключение системы СПУУ-52-4 производится выключателем В70. В этом случае реле Р101 обесточивается. Напряжение с шины ВУ поступает через контакты 2-1 реле на контакт 7 ШР электромеханизма ЭМ и на соответствующую обмотку его электродвигателя. Электродвигатель приходит во вращение и поворачивает поводок механизма в крайнее правое положение. После этого микровыключатель отключает электромеханизм ЭМ, при этом подвижный упор будет находиться в крайнем правом положении и не будет препятствовать перемещению педалей. При крайнем правом положении электромеханизма сигнал с контакта 3 ДОС поступает на контакт 13 ШР блока БУ-32. Этот сигнал вызывает отклонение стрелки индикатора нуля (рис. 2) до совмещения с крайним левым неподвижным индексом. На панели блока БУ-32 загорается красная кнопка-лампа, сигнализирующая об отключении системы. Для обеспечения возможности записи основных параметров СПУУ-52-4 и подсоединения системы автоконтроля на правой стенке центрального пульта летчика вертолета установлен контрольный штепсельный разъем ШРК3 (см. рис. 1). На разъем выведены контакты цепей для записей входных и выходных сигналов СПУУ-52-4, а также ряд других цепей, необходимых при проверке и отладке СПУУ-52-4. Проверка работоспособности системы осуществляется летчиком с помощью встроенного контроля. Органы управления встроенным контролем (кнопка-лампа и переключатель) расположены на лицевой панели блока управления БУ-32 (см. рис. 2). Для проверки нажимается кнопка-лампа, а переключатель устанавливается в положение "р". При этом стрелка индикатора нуля совместится с левой риской на его шкале, что соответствует вращению вала электромеханизма. При выключении переключателя и отпускании кнопки-лампы стрелка индикатора |
|
|
|
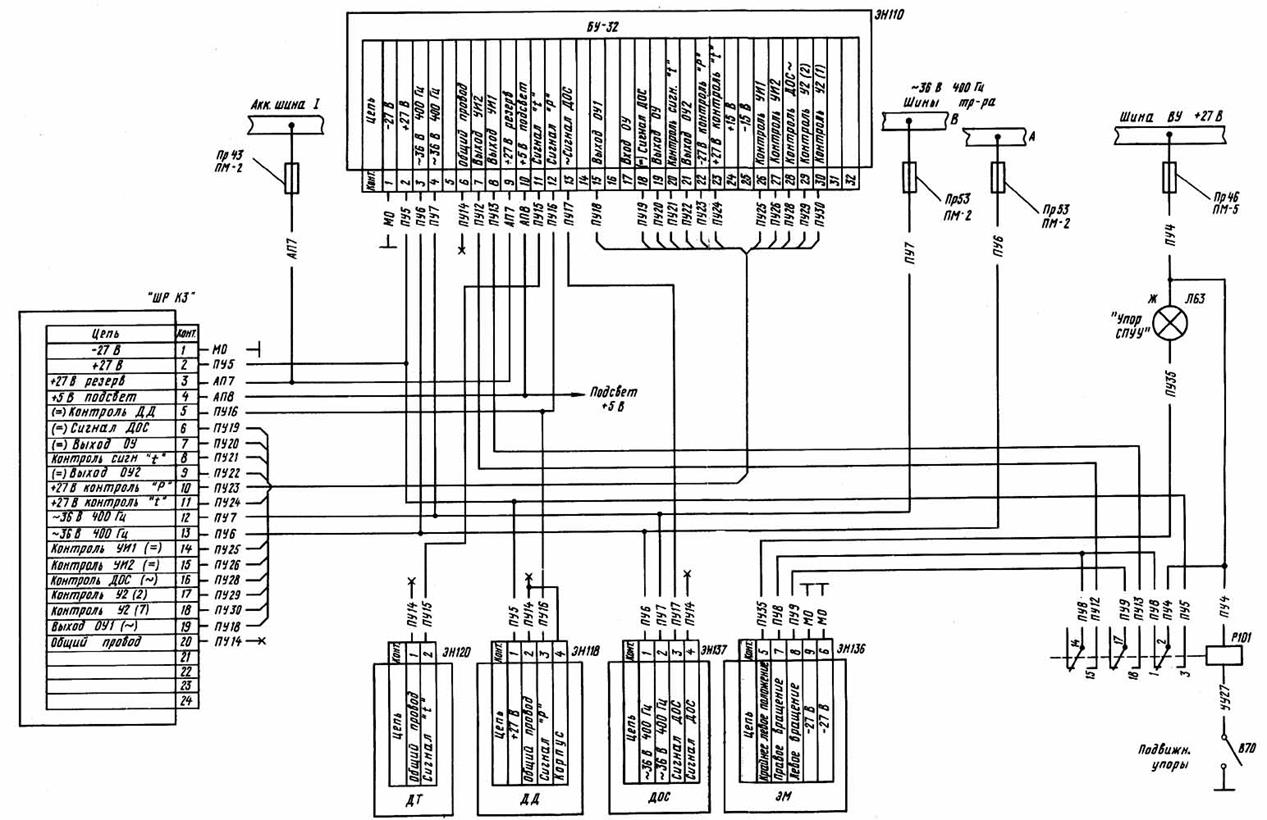
Система СПУУ-52-4
Рис. 1 (лист 1 из 2)
| ШРКЗ | - контрольный штепсельный разъем |
| Пр43 | - предохранитель ПМ-2 в цепи питания СПУУ-52-4 постоянным током (резерв) |
| ЭН110 | - блок управления БУ-32 |
| Пр53 | - предохранитель Ш-2 в цепи питания СПУУ-52-4 переменным током 36 В (фазы А и В) |
| Пр46 | - предохранитель ПМ-5 в цепи питания СПУУ-52-4 постоянным тоном (основной) |
| Л63 | - желтое табло сигнализации положения "УПОР СПУУ" |
| Р101 | - реле ТКЕ26П1Г включения СПУУ-52-4; |
| В70 | - выключатель "ПОДВИЖН. УПОРЫ" ВГ-15К-2С |
| ЭН136 | - электромеханизм (ЭМ) МПК-13А-5-2 сер. |
| ЭН137 | - датчик обратной связи ДОС |
| ЭН118 | - датчик давления (ДД) ИКД-27Да-400-830 |
| ЭН120 | - приемник электрического термометра сопротивления (ДТ) П-1 |
Система СПУУ-52-4
Рис. 1 (лист 2 из 2)
| перемещается в среднее положение, а вал электромеханизма возвращается в исходное положение. Контроль канала температуры осуществляется аналогично проверке канала давления, но переключатель устанавливают в положение "t". |
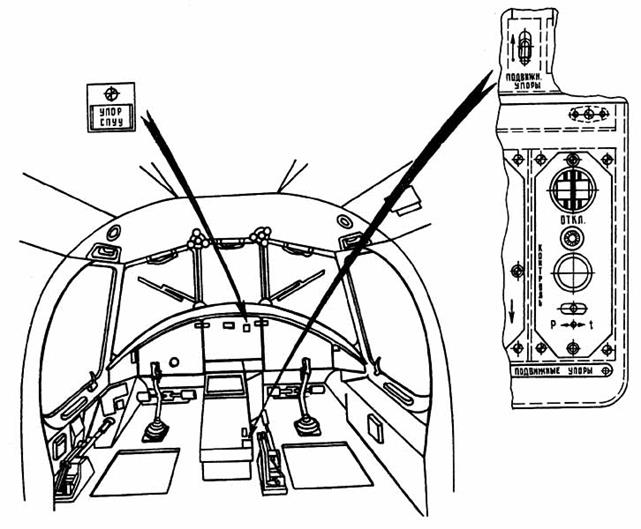
Схема расположении блока БУ-32, выключателя "ПОДВИЖН. УПОРЫ" и сигнального табло "УПОР СПУУ"
Рис. 2
СХЕМА ЭЛЕКТРИЧЕСКАЯ ПРИНЦИПИАЛЬНАЯ СПУУ-52-4 –
|
|
|
Воспользуйтесь поиском по сайту:

©2015 - 2026 megalektsii.ru Все авторские права принадлежат авторам лекционных материалов. Обратная связь с нами...