 |


Расчетно-графическое задание №2
|
|
|
|
Определение положения центра тяжести плоского тела
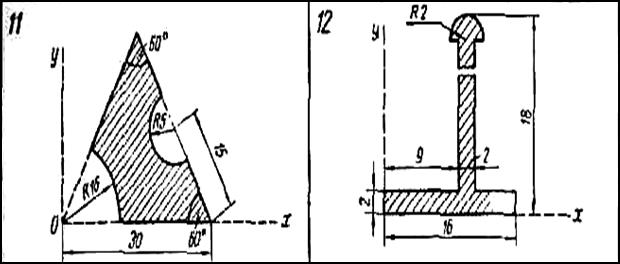
Найти координаты центра тяжести плоской фигуры, размеры — в сантиметрах.
Пример выполнения задания:
Определить координаты центра тяжести плоской фигуры, показанной на рис. 1.
Решение

Рис.1
Координаты центра тяжести площади определяем по формулам:
xC =  ; y C =
; y C =  . (1)
. (1)
Чтобы воспользоваться этими формулами, площадь фигуры делим на отдельные части, положения центров тяжести которых известны. В данном случае такими частями являются: прямоугольник, треугольник и половина круга (рис.2). Площадь половины круга, вырезанную из площади прямоугольника, считаем отрицательной.
Имеем:
площадь прямоугольника
F 1 = 40 • 30 = 1200 см2,
площадь треугольника
F 2 =  = 1000 см2;
= 1000 см2;
площадь половины круга
F 3 =  = 200 p = 628 см 2
= 200 p = 628 см 2

Рис.2
Центры тяжести рассматриваемых частей сечения имеют следующие координаты:
для прямоугольника
х 1 = 15 см; у 1 = 20 см;
для треугольника
x 2 = 30 +  = 46,7 см; y 2 =
= 46,7 см; y 2 =  = 13,3 см;
= 13,3 см;
для половины круга
х 3 =  =
=  = 8,5 см; y 3 = 20 см.
= 8,5 см; y 3 = 20 см.
Для вычисления координат центра тяжести плоской фигуры составляем таблицу.
| Номер элемента | Fi,см 2 | xi,см | yi,см | Siy = Fi xi, см 3 | Six = Fi yi, см 3 |
| -628 | 15,0 46,7 8,5 | 20,0 13,3 20,0 | -5338 | -12560 | |
| S | -- | -- |
По формулам (1) вычисляем координаты центра тяжести плоской фигуры:
x C =  =37,8 см; y C =
=37,8 см; y C =  =15,7 см.
=15,7 см.
Центр тяжести площади указан на рис. 2.




 |
 |










Определение траектории, скорости и ускорения точки, при движении её в координатной форме.
Если точка движется относительно некоторой системы координат, то координаты точки изменяются с течением времени. Уравнения, выражающие функциональные зависимости координат движущейся точки от времени, называют уравнениями движения точки в системе координат.
|
|
|
Движение точки в пространстве задается тремя уравнениями:
 (3.1)
(3.1)
Движение точки в плоскости (рис. 17) задается двумя уравнениями:
 (3.2)
(3.2)
Системы уравнений (1) или (2) называют законом движения точки в координатной форме.

рис.17
Ниже рассматривается движение точки в плоскости, поэтому используется только система (2).
Если закон движения точки задан в координатной форме, то
A). траектория плоского движения точки выражается уравнением
 ,
,
которое образуется из данных уравнений движения после исключения времени  ;
;
B). числовое значение скорости точки находится из формулы

после предварительного определения проекции (см. рис. 17) скорости на оси координат
 и
и 
C). числовое значение ускорения находится из формулы

после предварительного определения проекций ускорения на оси координат
 и
и  ;
;
Направления скорости и ускорения относительно осей координат определяются из тригонометрических соотношений между векторами скорости или ускорения и их проекциями.
Используя уравнения движения точки в координатной форме, можно определить радиус кривизны траектории движущейся точки без непосредственного исследования уравнения траектории. Этот способ основан на том, что радиус кривизны траектории движущейся точки входит в формулу

выражающую числовое значение нормального ускорения.
Отсюда
 . (а)
. (а)
Скорость  точки определяется по формуле
точки определяется по формуле
. (б)
Следовательно,
 . (б’)
. (б’)
Числовое значение нормального ускорения  входит в выражение полного ускорения точки
входит в выражение полного ускорения точки
 ,
,
откуда
 , (в)
, (в)
где квадрат полного ускорения
 (г)
(г)
и касательное ускорение
 . (д)
. (д)
Расчетно-графическое задание №3.
Определение кинематических параметров для материальной точки, движущейся криволинейно.
Задание
|
|
|
Определение скорости и ускоренна точки по заданным уравнениям ее движения По заданным уравнениям движения точки М установить вид ее траектории и для момента времени t= t 1 (сек) найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории в соответствующей точке.
Необходимые для решения данные приведены в табл.1.
Пример выполнения задания
Исходные данные в см и сек:
 } (1)
} (1)
t 1 = 
Решение
Уравнения движения (1) являются параметрическими уравнениями траектории точки М. Чтобы получить уравнение траектории в обычной координатной форме, исключим время t из уравнений движения.
Тогда
у = х 2 - 1. (2)
Это выражение есть уравнение параболы.
Для определения скорости точки находим проекции скорости на оси координат:
ux =  = 4 см/сек;
= 4 см/сек;
uy =  = 32 t см/сек.
= 32 t см/сек.
Модуль скорости точки
u =  . (3)
. (3)
Аналогично проекции ускорения точки
wx =  = 0; wy =
= 0; wy =  = 32 см/сек2.
= 32 см/сек2.
Модуль ускорения точки
w =  = 32 см/сек2.
= 32 см/сек2.
Координаты точки, а также ее скорость, ускорение и их проекции на координатные оси для заданного момента времени t = 1/2 сек приведены в табл.2.
Таблица 2
| Координаты, См | Скорость, см/сек | Ускорение, см/сек2 | Радиус кривизны, см | |||||||
| x | Y | ux | uy | u | wx | wy | wn | wt | w | r |
| 16,5 | 7,94 | 34,3 |
Касательное ускорение находим путем дифференцирования модуля скорости (З):
wt =  ;
;
 =
=  =
=  .
.
При t = 1/2 сек
=  = 31 см/сек2
= 31 см/сек2
Следовательно, модуль касательного ускорения
wt = 31 см/сек 2.
Знак «+» при показывает, что движение точки ускоренное и, следовательно, направления  и
и  совпадают.
совпадают.
Нормальное ускорение точки в данный момент времени
wn =  =
=  = 7,94 см/сек 2
= 7,94 см/сек 2
Радиус кривизны траектории в той точке, где при t = 1/2 сек находится в точке М,
r =  =
=  = 34,3 см.
= 34,3 см.
Полученные значения wt и wn и r также приведены в таблице.
Пользуясь уравнением (2), вычерчиваем траекторию (рис.1) и показываем на ней положение точки М в заданный момент времени. Вектор строим по составляющим  и
и  , причем этот вектор должен быть направлен по касательной к траектории точки. Вектор
, причем этот вектор должен быть направлен по касательной к траектории точки. Вектор  находим как по составляющим
находим как по составляющим  и
и  , так и по и
, так и по и  , чем контролируется правильность вычислений.
, чем контролируется правильность вычислений.

Рис.1
Таблица 1
| Номер варианта | Уравнения движения | t 1, сек | |
| x = x(t) см | y = y(t) см | ||
| —2 t 2+3 | — 5 t | ½ | |
4 cos2  t + 2 t + 2
| 4 sin2 t
| ||
| -cos t 2 + 3
| sin t 2 - 1
| ||
| 4 t + 4 | - 
| ||
| 2sin t
| — 3 cos t + 4
| ||
| 3 t 2 + 2 | —4 t | ½ | |
| Зt2 - t + 1 | 5 t 2 -  t - 2 t - 2
| ||
7 sin  t 2 + 3 t 2 + 3
| 2 — 7 cos t 2
| ||
- 
| 3 t + 6 | ||
| — 4 cos t
| —2sin t — 3
| ||
| — 4 t 2 + 1 | - 3 t | ½ | |
| 5 sin2 t
| — 5 cos2 t— 3
| ||
| 5 cos t 2
| — 5 sin t 2
| ||
| -2 t - 2 | 
| ||
| 4cos t
| —3sin t
| ||
| 3t | 4 t 2 + 1 | ½ | |
| 7 sin2 t — 5
| — 7 cos2 t
| ||
| 1 + 3 cos t 2
| 3 sin t 2 + 3
| ||
| — 5t2 — 4 | 3 t | ||
| 2 — 3 t — 6 t2 | 3 -  t - 3 t 2 t - 3 t 2
| ||
| 6 sin t 2 — 2
| 6 cos t 2 + 3
| ||
| 22. | 7 t 2—3 | 5 t | 
|
| 3 — 3 t 2 + t | 4 - 5 t 2 + t
| ||
| — 4 cos t — 1
| — 4 sin t
| ||
| —6 t | — 2 t 2 — 4 | ||
| 8 cos2 t + 2
| — 8 sin2 t — 7
| ||
| — 3 - 9 sin t 2
| —9cos t 2 + 5
| ||
| — 4 t 2 + 1 | —З t | ||
| 5 t 2 + t - 3
| 3 t 2 + t + 3 | ||
| 2 cos t 2 — 2
| - 2 sin  t 2 + 3 t 2 + 3
|
СПИСОК ЛИТЕРАТУРЫ
|
|
|
- Сборник заданий для курсовых работ по теоретической механики. Под ред. проф. А.А. Яблонского. Учеб. пособие для втузов. М., «Высшая школа», 1972.- 432 с.
- Бать М. И. И др. Теоретическая механика в примерах и задачах. М., «Политехника», 1995. – 670 с.
- Мещерский И. В. Задачи по теоретической механики. М.: «Лань», 2001.- 448 с.
- Тарг С. М. Краткий курс теоретической механики: Учебник для втузов. – 12 изд., стер. – М.: Высшая школа, 2002. – 416 с.
- Федута А. А., Чигарёв А. В., Чигарёв Ю. В. Теоретическая механика и методы математики: - Уч. пособие, - Минск.: УП «Технопринт», 2000. – 504 с.
- Яблонский А. А., Никифорова В. А. Курс теоретической механики. М.: «Лань», 2001. – 768 с.
- Цывильский В. Л. Теоретическая механика. М., «Высшая школа» 2001. – 319 с.
Игорь Павлович Карначев
|
|
|
