 |


Кинематический анализ и синтез механизмов.
|
|
|
|
Структурный анализ и синтез механизьмов.
1.Основные понятия теории машин и механизьмов: машина, механизьм, звено, виды звеньев.
ТММ наука в которой рассматривают вопросы анализа механизмов в разделах стр-ры и классификация мех., 1) кинематика мех. 2) методы кинетостатического расчета мех-мов.3) методы синтеза частных мех-мов. 4) Методы динамического исследования механизма. Машина – единый комплекс мех-мов предназначенный для механизации тенолог. процесса. Механизм – искусственная кинематическая цепь с одним не подвижным звеном предназначенная совершать вполне определенные целесообразные движения.Звено механизма – деталь или жесткая система деталей. Стоика – деталь или жесткая система деталей (неподвижн). Кривошип – звено, соединенное со стойкой и совершающее вращательное движение (полный оборот). Коромысло – звено, соединенное со стойкой совершающее не полный оборот вокруг нее. Кулиса – звено, соединенное со стойкой и являющееся подвижной направляющей для ползуна.Шатун – звено, соединяющее 2 неподвижных звена и совершающее сложное плоско параллельное движение Ползун – звено, совершающее поступательное движение относительно направляющей. Зубчатое колесо – звено с замкнутой системой зубьев обеспечивающее за свой полный оборот непрерывное движение парного звена. Кулачок – звено, профиль которого имеет переменную кривизну, определяемую законом движения ведомого звена.
2.Кинематическая пара. Класс кинематических пар и их классификация. Примеры.
Кинематическая пара – подвижное соединение двух звеньев. По геометрическому признаку низшие и высшие. Низшие – звенья соприкасаются по поверхности (вращат., поступательное, винт.). Высшие – звенья соприкасающиеся в точки или по линии касания двух кривошипных контуров. Могут быть плоскими пространственными. Плоские – все точки звеньев движутся в плоскости.
3.Кинематические цепи и их классификация. Структурные формулы кинематических цепей и механизьмов.
Связанная система звеньев образующая между собой кинематические пары. Простые P<=2 сложные P>2. Кинематическая цепь характеризующаяся числом степеней свободы или числом независимых движений которые можно сообщить звеньям. W=f(n;Ps;s) W=6(k-1)-5p5-4p4-3p3-2p2-p1
4.Структурная классификация плоских механизьмов. Группы Ассура. Класс и порядок групп Ассура. Класс механизьмов. Примеры.
W=3n-2p5-p4 Ф-ла Чебышева Механизмы классифицируют по различным признакам, и в первую очередь их делят на механизмы с низшими и высшими парами; Порядок- это число кинемат. пар которыми группа присоединяется к механизму. Класс гр. асура определяется числом кинематических пар на внутреннем контуре. Наиболее распространенные механизмы с низшими парами — рычажные, клиновые и винтовые; с высшими парами — кулачковые, зубчатые, фрикционные, мальтийские и храповые.Механизмы классифицируют и по их назначению: «кривошипно-ползунный механизм поршневого компрессора», «кулачковый механизм двигателя» Группа Ассура это кинемат. цепь которая состоит из звеньев 5 класса W=0. Класс механизма определятся по классу гр. Ассура
5.Формулы строения механизьмов с примерами. Избыточные связи, лишние степени свободы.
Избыточные связи q повторяют ограничения наложенные другими связями и они не оказывают влияния на хар-р движения их вводят для повышения жесткости и прочности. Для определения ф-лы определяют группы Ассура и записывают в порядке их присоединения к ведущему звену, римскими цифрами записывают класс группы Ассура в скобках входящие в данную группу нумерованные звенья.
6.Замена высших кинематических пар. Условия замены. Примеры.
При замене число ст. свободы мГн движение звеньев основного и замен эквив. Мех-мов должны быть равны. Высшая пара 4го класса плоских мех-мов накладывает 1усл связи. Цепь, состоящая из пар 4го класса должна также накладывать одно условие связи. Высшая пара 4го класса плоских мех-мов эквивалентна одному звену имеющему 2 низшие кин пары 5го класса.
|
|
|
|
|
|
Кинематический анализ и синтез механизмов.
1.Задачи и методы кинематики. Масштабные коэффициенты. Построение плана механизьма.
Задачи: определение перемещений звеньев и траекторий точек, скорости точек звеньев и угловых скоростей звеньев, ускорений и угловых ускорений точек звеньев, траектории для исключения столкновения звеньев, определение хода звеньев, установления очертаний корпусов картеров машин, скорости и ускорения для расчета инерционных нагрузок уравновешивающих сил, реакции кинемат пар. Методы: Аналитический, Графический, Графо-Аналитич, Экспериментальное. M=истина/чертеж. План мех-зма это кинемат. схема механизма для данного положения, ведущего звена. Построение плана механизма начинают с построения крайних положений. Масштабные коэф-ты отношение размеров на чертеже к действительным размерам.
2.Построение планов скоростей для шарнирного четырехзвенника в промежуточном и в 3 крайних положениях. Свойства плана скоростей.
1) Масштабный коэф. M=l(ab)/AB 2)Уравнение скоростей(векторное)Vc=Vb+Vcb 3) нахождение велечин векторов из кинемат соотношений Vb=ω*AB. Сва-ва планов скоростей: сво-во подобия прямые линии соеденяющие концы векторов скоростей этих точек на плане скоростей образуют подобные фигуры. Фигура на плане повернуто относительно фигуры на 90. План скоростей дает возможность находить угловую скорость звено по модулю и направлению ω=V/l Vàω
3.Построение планов ускорений для шарнирного четырехзвенника в промежуточном и в 3 крайних положениях. Свойства плана ускорений.
Св-ва планов ускорений: сво-во подобия прямые линии соеденяющие концы векторов ускорений этих точек на плане ускорений образуют подобные фигуры. Подобные фигуры должны быть сходственно расположены. План ускорений дает возможность находить угловое ускорений звена по модулю и направлению ξ=aτ/l ξà aτ 2) Ускорение любой точки можно найти используя свойство подобия 3) План ускорений дает возможность находить радиусы кривизны траекторий точек без их построения. 1) Масштабный коэф. M=l(ab)/AB 2)Уравнение ускорений (векторное) 3) нахождение велечин векторов из кинемат соотношений.
4.Построение планов скоростей и ускорений для кривошипно-шатунного механизьма в промежуточном и в 3 крайних положениях.
5.Кривошипный механизьм с поступательно движущийся кулисой – синусный механизьм. План скоростей и ускорений в промежуточном и в 3 крайних положениях.
6.Кориолисово ускорение в кулисных механизьмах. Кулисный механизьм с качающейся кулисой. План скоростей и ускорений в промежуточном и в 3 крайних положениях.
При непоступательном переносном движении возникает добавочное кориолисово ускорение. ak=2wevr, we- переносная угловая скорость, vr- относительная скорость (линейная) Направление кориолисова ускорения: вектор относительной скорости повернуть на 900 в сторону переносного вращения по часовой стрелке или против.
7.Общие сведения о зубчатых передачах. Классификация зубчатых передач и их краткой характеристикой.
Зубчатая передача – это передаточный механизм, звенья которого зубчатые колеса, служат для передачи движения и сил путем непосредственного зацепления. Принято меньшее зубчатое колесо наз. шестерней, большое колесом. Передаточное отношение – отношение угловых скростей ведущего и ведомого колес. U12=W1/W2 Предаточное число – отношение числа зубьев колес к числу зубьев шестерни. U12=Z2/Z1 Зубчатые передачи в которых происходит понижение угловой скорости при передачи движения от входного звена к выходному – понижающие передачи, редукторы. То же самое, но для повышения угловой скорости – повышающие передачи, мультипликаторы. Пределы измерения перед. отношения: -цилиндр передачи 1-6(10) - конические передачи 1-4 (6) – червячно-винтовые 10-40 (80) 1.По взаимному расположению осей: -цилиндрические передачи – конические с пересекающимися осями – с перекрещивающимися осями; червячные, винтовые, гипоидные 2.В зависимости от расположения зубьев относительно образующей начального цилиндра колеса. – прямозубые, направление зуба совпадает с осью колеса. – косозубые. – шевронные передача углы наклона зубьев до 40 – обеспечивают передачу больших усилий (до 40квт) последние 3 вида обеспечивают повышенную нагрузочную способность и плавность хода. 3.В зависимости от формы профайла зуба, т.е в зависимости от формы кривой.
8.Структура и кинематика зубчатой пары. Структура и кинематика паразитного ряда. Структура и кинематика ступенчатого ряда. Картина скоростей.
Основным кинематическим параметром зубчатого механизма является передаточное отношение. Передаточным отношением  называется отношение угловой скорости звена 1 (
называется отношение угловой скорости звена 1 ( ) к угловой скорости звена 2 (
) к угловой скорости звена 2 ( ) (рис.15.1).
) (рис.15.1).  Очевидно, что
Очевидно, что  (15.1) Если
(15.1) Если  и
и  , то
, то  (15.2) где
(15.2) где  и
и  – частота вращения, мин-1, звена 1 и звена 2. Для механизмов с параллельными осями передаточное отношение считается положительным при одинаковом направлении угловых скоростей и отрицательным – при противоположном. Для цилиндрической передачи знак "плюс" соответствует внутреннему зацеплению (рис. 15.1 б), а "минус" – внешнему (рис. 15.1 а). Передаточное отношение можно представить в виде
– частота вращения, мин-1, звена 1 и звена 2. Для механизмов с параллельными осями передаточное отношение считается положительным при одинаковом направлении угловых скоростей и отрицательным – при противоположном. Для цилиндрической передачи знак "плюс" соответствует внутреннему зацеплению (рис. 15.1 б), а "минус" – внешнему (рис. 15.1 а). Передаточное отношение можно представить в виде  (15.3) Многоступенчатый зубчатый механизм можно образовать последовательным соединением колес (рис. 15.2), при котором вращение от ведущего вала О1 передается ведомому валу О4 через промежуточные валы О2 и O3, на каждом из которых помещено по два колеса 2 и 2´, 3 и 3´. Колеса 2 и 2´ жестко соединены с валом O2 и имеют общую угловую скорость ; аналогично колеса 3 и 3´ также жестко соединены с валом О3 и имеют общую угловую скорость
(15.3) Многоступенчатый зубчатый механизм можно образовать последовательным соединением колес (рис. 15.2), при котором вращение от ведущего вала О1 передается ведомому валу О4 через промежуточные валы О2 и O3, на каждом из которых помещено по два колеса 2 и 2´, 3 и 3´. Колеса 2 и 2´ жестко соединены с валом O2 и имеют общую угловую скорость ; аналогично колеса 3 и 3´ также жестко соединены с валом О3 и имеют общую угловую скорость  .
.
|
|
|
|
|
|
 На одной проекции (см. рис. 15.2) направление угловых скоростей показано круговыми стрелками, а на второй – прямыми. При последовательном ступенчатом соединении колес передаточное отношение равно произведению передаточных отношений промежуточных зацеплений (см. рис. 15.2)
На одной проекции (см. рис. 15.2) направление угловых скоростей показано круговыми стрелками, а на второй – прямыми. При последовательном ступенчатом соединении колес передаточное отношение равно произведению передаточных отношений промежуточных зацеплений (см. рис. 15.2)  (15.4) В данном случае имеем трехступенчатую передачу. В общем случае передаточное отношение
(15.4) В данном случае имеем трехступенчатую передачу. В общем случае передаточное отношение  (15.5) где K – число внешних зацеплений. При простом последовательном соединении зубчатых колес (рис. 15.3) величина общего передаточного отношения не зависит от количества промежуточных (паразитных) колес.
(15.5) где K – число внешних зацеплений. При простом последовательном соединении зубчатых колес (рис. 15.3) величина общего передаточного отношения не зависит от количества промежуточных (паразитных) колес. 
 (15.6) В общем случае
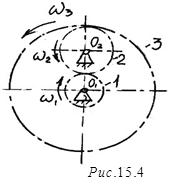
(15.6) В общем случае  (15.7) где K – число внешних зацеплений. "Паразитные" колеса могут изменить знак передаточного отношения; например, при внешнем зацеплении (см. рис. 15.3) каждое четное колесо 2 и 4 вращается в сторону, противоположную вращению входного колеса 1, а каждое нечетное колесо 3 – в сторону вращения входного колеса 1. На рис. 15.4 показано последовательное соединение, состоящее из трех колес: 1, "паразитное" 2 и выходное 3 с внутренним зацеплением. Передаточное отношение
(15.7) где K – число внешних зацеплений. "Паразитные" колеса могут изменить знак передаточного отношения; например, при внешнем зацеплении (см. рис. 15.3) каждое четное колесо 2 и 4 вращается в сторону, противоположную вращению входного колеса 1, а каждое нечетное колесо 3 – в сторону вращения входного колеса 1. На рис. 15.4 показано последовательное соединение, состоящее из трех колес: 1, "паразитное" 2 и выходное 3 с внутренним зацеплением. Передаточное отношение  Передаточное отношение червячной передачи равно отношению числа зубьев колеса к числу витков червяка.
Передаточное отношение червячной передачи равно отношению числа зубьев колеса к числу витков червяка. 
 (15.8)
(15.8)
|
|
|
где  – число зубьев червячного колеса;
– число зубьев червячного колеса;  –число витков червяка; и – частота вращения червяка и колеса, мин-1. Механизм, изображенный на рис. 15.5, состоит из пары цилиндрических колес 1 и 2, пары конических колес 2´, 3 и червячной пары 3´ и 4, где звено 3´ – червяк, а 4 – червячное колесо. Общее передаточное отношение для этого механизма
–число витков червяка; и – частота вращения червяка и колеса, мин-1. Механизм, изображенный на рис. 15.5, состоит из пары цилиндрических колес 1 и 2, пары конических колес 2´, 3 и червячной пары 3´ и 4, где звено 3´ – червяк, а 4 – червячное колесо. Общее передаточное отношение для этого механизма  где
где  – число зубьев червячного колеса, а
– число зубьев червячного колеса, а  – число витков червяка. Знак для общего передаточного отношения можно поставить лишь для того случая, когда входной и выходной валы вращаются относительно осей, параллельных друг другу. Последовательный (ступенчатый) ряд зубчатых колес.
– число витков червяка. Знак для общего передаточного отношения можно поставить лишь для того случая, когда входной и выходной валы вращаются относительно осей, параллельных друг другу. Последовательный (ступенчатый) ряд зубчатых колес.  Данный ряд служит для получения значительных передаточных отношений. На крайних валах закреплено по 1 зубчатому колесу, на промежуточных - по 2. Определим передаточное отношение.
Данный ряд служит для получения значительных передаточных отношений. На крайних валах закреплено по 1 зубчатому колесу, на промежуточных - по 2. Определим передаточное отношение.  .
.  , т.о. для получения общего передаточное отношения следует перемножить передаточное отношения отдельных ступеней.
, т.о. для получения общего передаточное отношения следует перемножить передаточное отношения отдельных ступеней. 
 9.Передача с подвижными осями. Классификация. Схема. Названия звеньев. Степень подвижности. Требования к планетарным передачам (3 условия проектирования).
9.Передача с подвижными осями. Классификация. Схема. Названия звеньев. Степень подвижности. Требования к планетарным передачам (3 условия проектирования).
a-солнечное колесо,c-сателит,h-водило,b-эпициклическое колесо. Планетарная передача-одно колесо заторможено. Дифференциал-все колёса подвижны Планетарные передачи-такие передачи,у которых есть колёса с подвижными осями. Z(a),Z(2)-центральное колесо с наружными зубьями(солнечное) Z(h)-неподвижное колесо(в данной схеме) центральное с внутренними зубьями-эпициклическое. Сателлиты вводят с целью уменьшения габаритов, снижения усилий зацепления, разгрузки подшипников центральных колёс, улучшения уравновешивания водила. При кинематическом расчёте учитывается один сателлит. Достоинства планетарных передач: 1)малые габариты и массы(вписывается в эпициклическое колесо) 2)удобство компановки-соосность ведущего и ведомого валов 3)меньший шум при работе 4)малые нагрузки на опоры,что упрощает конструкции и снижает потери в ней 5)большие передаточные числа(1000 и более) Недостатки: 1)повышенные требования изготовления и монтажа 2)снижение КПД Применение: 1)редукторы в силовых передачах и приборах 2)коробка переменных передач 3)дифференциал в автомобилях,станках и т.д. 3 условия для исследования (проектирования): 1)соосности Z(2)+2Z(1)=Z(4) 2)сборки при симметрично расположенных сателлитах (Z(2)+2Z(h))/c=q q-целое число,с-число сателлитов Для определения U в планетарных передачах используется метод остановленного водила (метод Виллиса): Всей планетарной передаче сообщается дополнатильное вращение с угловой скоростью водила,но в обротнам направлении. Результат:водило остановится,закреплённое колесо освобождается,начинает вращаться со скоростью –wh.Остальным колёсам сообщается дополнительное вращение. Получим обращённый механизм:обычная непланетарная зубчатая передача,геометрические оси всех колёс неподвижны.
10.Основное уравнение планетарного ряда abH.
Это однорядный планетарный редуктор с одним внешним,одним внутренним зацеплением (механизм Джемса). Ведущее-солнце. U(h ab)=Z(c)/Z(a)*Z(b)/Z(c)*(-1)^1=-Z(b)/Z(a) U(h ab)=w(h a)/w(h b)=(w(a)-w(h))/-w(h)=1-w(a)/w(h)=1-U(b ah) U(b ah)=1-U(h ab)
Звено мех-ма первонач. w угл. Скорость –w(h)
a w(a) w(a)-w(h)
b w(b)=0 -w(h)
c w(c) w(c)-w(h)
h w(h) 0
K=-U(h ab)=(w(a)-w(h))/-w(h) K-передаточное отношение W(h)*(1-K)-w(a)=0 U(b ah)=вх/вых U(b ah)=1/U(b ah)=1/(1-U(h ab)-водило ведущее U(b ch)=1-U(h cb)=1-Z(b)/Z(c)=(Z(c)-Z(b))/Z(c) W=3n-2p(5)-p(4)=3*3-2*3-2=1
11.Основное уравнение кинематики планетарного механизьма с двумя внешними зацеплениями (ряд Давида).
Двухрядный планетарный редуктор с двумя внешними зацеплениями;ведущее-солнце W=3n-2p(5)-p(4)=3*3-2*3-2=1 1)вход;2)сателлит;3)выход U(a2 a1h)= -12/13
Звено мех-ма первонач. w угл. Скорость –w(h)
a1 w(a1) w(a1)-w(h)
a2 w(a2)=0 -w(h)
h w(h) 0
c1 w(c1) w(c1)-w(h)
c2 w(c2) w(c2)-w(h)
U(h a1a2)=Z(c1)*Z(a2)/(Z(a1)*Z(c2))*(-1)^2
U(h a1a2)=(w(a1)-w(h))/-w(h)=1-w(a1)/w(h)=1-U(a2 a1h)
U(a2 a1h)=1-U(h a1a2)=1-Z(c1)*Z(a2)/(Z(a1)*Z(c2))=(Z(a1)*Z(c2)-Z(c1)*Z(a2))/(Z(a1)*Z(c2))
U(a2 ha1)=1/U(a2 a1h)=1/(1-U(h a1a2))
U(a2 c2h)=1-U(h c2a2=1+Z(a2)/Z(c2)
12.Структура и кинематика планетарного механизьма с 2 центральными колесами с внутренними зацеплениями.
U(b1 hb2)=-nm/nr
Звено мех-ма первонач. w угл. Скорость –w(h)
b1 w(b1) w(b1)-w(h)
b2 w(b2)=0 -w(h)
h w(h) 0
c1 w(c1) w(c1)-w(h)
c2 w(c2) w(c2)-w(h)
U(b2 hb1)=1/U(b2 b1h)
U(h b1b2)=Z9c1)*Z(b2)/(Z(b1)*Z(c2))*(-1)^0
U(h b1b2)+(w(b1)-w(h))/-w(h)=1-w(b1)/w(h)=1-U(b2 b1h)
U(b2 b1h)=1-U(h b1b2)=1-Z(c1)*Z9b2)/(Z(b1)*Z(c2))
13.Структура и кинематика планетарного механизьма с 3 центральными колесами (редуктор со #свободнымводилом)
U(b1 a1b2)=-mt/mr Водило свободно вращается в опорах,не передавая движения, не несёт нагрузки от внешних моментов(плавающее водило). При кинематическом исследовании этот механизм рассматривается состоящим из двух простых: 1)центральные колёса a1,b1;сателлит c1;водило 2)центральные колёса b1,b2;сателлиты c1,c2;водило
U(b1 a1b2)=w(a1)/w(b2)*w(h)/w(h)=U(b1 a1h)*U(b1 hb2)=1-u(h a1b1)*1/(1-U(h b2b1))=(1+Z(b1)/Z(a1))*1/(1-Z(c2)*Z(b1)/(Z(b2)*Z(c1)))=Z(b2)*Z(c1)*(Z(a1)+Z(b1)/(Z(a1)*(Z(b2)*Z(c1)-Z(c1)*Z(b1)))
14.Основная теорема зубчатого зацепления. Следствие основной теоремы зацепленния.
Осн. теорема зуб. зацепл: Нормаль в точке соприкасания элементов высшей пары делит линию центров на части обратнопропорционально угловым скоростям. 
15.Эвольвента и ее свойства. Угол развернутости, профильный угол, инволюта, радиус кривизны эвольвенты.
 Угол развернутости эвольвенты- угол между двумя нормалями к эвольвенте, ее предельной А0, принадлежащей основной окружности(эволюте) и рассматриваемой точкой А.
Угол развернутости эвольвенты- угол между двумя нормалями к эвольвенте, ее предельной А0, принадлежащей основной окружности(эволюте) и рассматриваемой точкой А.  Профильный угол- угол между радиусом-вектором АО и радиусом ОМ основной окружности, проведенной в точку М касания производящей прямой.
Профильный угол- угол между радиусом-вектором АО и радиусом ОМ основной окружности, проведенной в точку М касания производящей прямой.  Инвалюта Свойства эвольвенты: 1.Производящая прямая во всех положениях касательна к основной окружности и нормальна ко всем производимым ею эвольвентам. 2.Отрезок производящей прямой от эвольвенты до точки касания с основной окружностью является радиусом кривизны эвольвенты в соответствующей точке. 3.С увеличениеи диаметра основной окружности Db эвольвента становится все более пологой, а при
Инвалюта Свойства эвольвенты: 1.Производящая прямая во всех положениях касательна к основной окружности и нормальна ко всем производимым ею эвольвентам. 2.Отрезок производящей прямой от эвольвенты до точки касания с основной окружностью является радиусом кривизны эвольвенты в соответствующей точке. 3.С увеличениеи диаметра основной окружности Db эвольвента становится все более пологой, а при  обращается в прямую. 4.Расстояния между эвольвентами по основной окружности и по нормали равны между собой, следовательно две одноименные эвольвенты являются эквидистальными кривыми. 5.Эвольвента не может существовать внутри основной окружности. Эвольвенты двух окружностей с неподвижными осями имеют общую касательную, пересекающую линию центров в точке Р(полюсе зацепления) и являются взаимоогибающими кривыми.
обращается в прямую. 4.Расстояния между эвольвентами по основной окружности и по нормали равны между собой, следовательно две одноименные эвольвенты являются эквидистальными кривыми. 5.Эвольвента не может существовать внутри основной окружности. Эвольвенты двух окружностей с неподвижными осями имеют общую касательную, пересекающую линию центров в точке Р(полюсе зацепления) и являются взаимоогибающими кривыми.
16.Основные элементы зубчатого эвольвентного зацепления. Основные размеры зубьев.
Из расчета на прочность определяется межосевое расстояние Аw. Аw=Rw1+Rw2. Передаточное отношение U12=Rw2/Rw1 Cмысл: эволевнтное зацепление обеспечивает постоянство передаточного отношения. N1N2 – производящая линия; она же общая нормаль к двум сопряженным эвольвентам, удовлетворяющим условию основной теории зацепления; она же касается к двум основным окружностям Rb1, Rb2; она же геометрическое место зацепления двух сопряженных эвольвент, кроме того линия N1N2 наз-я линией зацепления. Основные размеры зубьев. Эвольвентные зубья после очерчиваются симметричными профилями и могут работать в обе стороны. R- делительная окружность. Делительные диаметры - базовые для определения элементов зубьев и их размеров. Z-число зубьев t-угловой шаг t=360/Z P – шаг (по делительной окружности) P=2pir/z m – модуль зацепления m=2r/z d – делительный диаметр d=mz ha – высота головки ha=0.8m hf – высота ножки hf=1.1m Rf – радиус впадины Rf=m(z/2 – 1.1) Ra- окружность выступов Ra=m(z/2 + 1.1) S – толщина зуба по делительной окружности Sa – толщина зуба по окружности вершин hf>ha – это делают для создания радиусного зазора.
17.Коэффициент торцевого перекрытия. Дуга зацепления.
Он определяется отношением: Eα=фиα/t 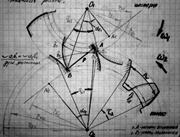 . Отношение угла торцевого перекрытия у его угловому могу наз-я коэф-ом торцевого перекрытия. Дуга, на которой пара касающихся зубьев поворачивают сопряженные колеса – дуга зацепления (дуга)ab. В момент окончания зацепления одной пары зубьев другая пара уже должна быть в зацеплении. Величина этого перекрытия определяется коэффициентом Eα, который показывает сколько времени находиться в зацеплении 1 и 2 пары зубьев. 1<Eα<2 Такое перемещение возможно, когда дуга зацепления больше шага зацепления, измеренных по одной окружности. При этом будет обеспечено постоянное зацепление одной пары профилей и на некотором участке будут работать 2 пары сопряженных профилей, что обеспечит плавность работы. Eα=(дуга)аb/Pw=фиα1/t1=фиα2/t2
. Отношение угла торцевого перекрытия у его угловому могу наз-я коэф-ом торцевого перекрытия. Дуга, на которой пара касающихся зубьев поворачивают сопряженные колеса – дуга зацепления (дуга)ab. В момент окончания зацепления одной пары зубьев другая пара уже должна быть в зацеплении. Величина этого перекрытия определяется коэффициентом Eα, который показывает сколько времени находиться в зацеплении 1 и 2 пары зубьев. 1<Eα<2 Такое перемещение возможно, когда дуга зацепления больше шага зацепления, измеренных по одной окружности. При этом будет обеспечено постоянное зацепление одной пары профилей и на некотором участке будут работать 2 пары сопряженных профилей, что обеспечит плавность работы. Eα=(дуга)аb/Pw=фиα1/t1=фиα2/t2 
18.Скольжение взаимодействующих зубьев. График.
Зацепление 2 зубьев происходит по активным участкам профилей. При вращение колес вследствие неравенства касательных составляющих окружных скоростей возникает относительное скольжение рабочих участков профилей. Различие значений V1^t u V2^t объясняется тем, что эвольвенты профилей взаимодействуют дугами различной длины. Скольжение вызывает износ зубьев, а так же дополнительные потери на трение. Vск.=(W1+W2)P Vск.=V1^t –V2^t (в векторном виде) V1^t=W1p1 V2^t=W2p2
19.Удельная скорость скольжения. График.
Активные части профилей зубьев-дуги различной длины, их взаимодействие сопровождается скольжением. Износ в различных частях профиля будет различным. Интенсивность этого износа характеризуется удельным скольжением. V=Vcк/V^t  V1=((W1+W2)PA)/p1W1=(сноска)|U12=W1/W2=N2P/N1P|=(1+1/U12)PA/p1 V2=(1+U12)PA/p2 (точка)N2: V1=(1+1/U12)N2P/N1N2=(1+1/(N2P/N1P))=1 (точка)N1: V2=…=1 Износ профиля зуба прямо пропорционален удельной скорости скольжения. Участки кривых Э1 и Э2 выше оси обцисс, относятся к головкам зубьев. Большому износу подвергнется ножка. При проектировне зубчатых зацепление линия зацепления должна распологаться в зоне относительных малых удельных скольжений.
V1=((W1+W2)PA)/p1W1=(сноска)|U12=W1/W2=N2P/N1P|=(1+1/U12)PA/p1 V2=(1+U12)PA/p2 (точка)N2: V1=(1+1/U12)N2P/N1N2=(1+1/(N2P/N1P))=1 (точка)N1: V2=…=1 Износ профиля зуба прямо пропорционален удельной скорости скольжения. Участки кривых Э1 и Э2 выше оси обцисс, относятся к головкам зубьев. Большому износу подвергнется ножка. При проектировне зубчатых зацепление линия зацепления должна распологаться в зоне относительных малых удельных скольжений.
20.Способ изготовления зубчатых колес методом копирования.
А)
 1.Фреза с режущей частью, выполненной по впадине колеса, вращается по стрелке 1.
1.Фреза с режущей частью, выполненной по впадине колеса, вращается по стрелке 1.
2. Заготовка перемещается по стрелке 2 (подача)
3. В результате этих двух движений фреза прорезает впадину по всей ширине колеса.
Б)Фреза с режущей частью выполненной по контуру впадины колеса, вращается по стрелке 1 и одновременно перемещается вдоль оси колеса перпендикулярно чертежу, прорезая тем самым впадину по всей ширине колеса. Второе движение может быть получено перемещением заготовки. Недостатки: - при высокой точности изготовление большое время нарезания - невозможно одновременно перерезание всех зубьев Преимущества: - универсальность инструмента - простота заточки - возможность получения наивыгоднейшей формы зуба нарезанием со смещением.
21.Способ изготовления зубчатых колес методом обкатки. Исходный и производящий контур инструментальной рейки.
Исходный контур – равнобочная трапеция
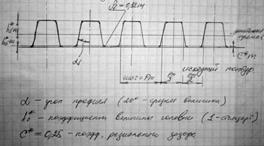 С*m - для обеспечения радиального зазора в зубчатом зацеплении.При нарезании инструментальной резьбой эвольвентная часть зуба образуется прямолинейной частью профиля зуба рейки, а переходная кривая – закруглением на вершине зуба инструмента. Производимая поверхность и изготовляемая поверхность зуба является взаимоогибающим кривыми, поэтому этот способ называют способом огибания или обкатки.
С*m - для обеспечения радиального зазора в зубчатом зацеплении.При нарезании инструментальной резьбой эвольвентная часть зуба образуется прямолинейной частью профиля зуба рейки, а переходная кривая – закруглением на вершине зуба инструмента. Производимая поверхность и изготовляемая поверхность зуба является взаимоогибающим кривыми, поэтому этот способ называют способом огибания или обкатки.
22.Блокировочный контур. Корригирование зубчатых колес.
Зубчатые колеса, изготовленные со смещением режущего инструмента наз. коррегированием. Если передача НЕкоррегированная, начальная и делительная окружности совпадают. Коррегирование делает передачу более прочной и долговечной. Обычно меньшее колесо (с менее прочными зубьями) коррегируют в +, что делает это более прочным, большее, же колесо обычно коррегирируют в -. Колеса становятся равнопрочными, след. Прочность передачи в целом увеличивается. Коррегирование +: Уменьшает износ, получить требуемое межосевое расстояние Aw, увеличивает контактную прочность на 20%, изгибную на 100%, долговечность на 200%, при тех же габаритах и материалах зубчатых колес. Рейку от заготовки отодвигают или придвигают на величину X*m (x-коэф. смещения). Для подбора величин существуют спец. Альбомы блокированных контуров. Блокированный контур – совокупность линий в системе x1, x2, ограничивающих зону допустимых значений коэф. смещения для передачи с фиксированным Zi.
23.Основные обозначения и определения в кулачковых механизьмах. Кинематический анализ кулачковых механизьмов. Законы движения ведомого звена кулачкового механизьма.
Это трёхзвенный механизм, предназначенный для преобразования движения ведущего звена(обычного кулачка),заданного движением ведущего звена(толкателя). Ф(n)-угол подъёма Ф(оп)-угол опускания. Ф(вв)-угол верхнего выстрела. Ф(нВ)-угол нижнего выстрела. В трёхзвенном мезанизме(стойка,кулачок,толкатель) 2 пары 5-го класса и 1 4-го. Профиль кулачка сложный.Его форма определяется воспроизводимым законом движения ведомого звена-толкателя. Достоинства: простота получения сложного движения ведомого звена остановками,наличие возвратного движения ведомого звена.
|
|
|
