 |


Оценка устойчивости по ЛЧХ
|
|
|
|
Построение амплитудно-фазовых частотных характеристик разомкнутых систем связано с громоздкими вычислениями, поэтому целесообразно оценивать их устойчивость по логарифмическим частотным характеристикам. Для этого необходимо построить ЛЧХ разомкнутой системы (рис.5.14). На рис.5.14 условно показано четыре варианта возможного прохождения ЛФХ.
В том случае, когда АФЧХ не имеет точек пересечения с вещественной осью слева от точки с координатами (-1, j0), то для устойчивости замкнутой системы необходимо и достаточно, чтобы выполнялось условие wс< wкр. То есть замкнутая система будет абсолютно устойчивой, если ЛАХ разомкнутой системы принимает отрицательные значения раньше, чем ЛФХ достигнет значения фазы -1800 (кривая 4 на рис.5.14).
Если ЛАХ разомкнутой системы принимает отрицательные значения позже, чем ЛФХ достигнет значения фазы -1800 (кривая 1 на рис.5.14), то замкнутая система неустойчивая.
Если ЛАХ разомкнутой системы принимает значение амплитуды 0 дб на одной частоте, что и ЛФХ достигнет значения фазы -1800 (кривая 2 на рис.5.14), то это соответствует колебательной границе устойчивости.
В условно устойчивых системах (кривая 3 на рис.5.14) для оценки устойчивости следует в диапазоне частот, где ЛАХ больше нуля, подсчитать число переходов ЛФХ через прямую -1800. Если число положительных (сверху вниз) переходов через эту прямую равняется числу отрицательных (снизу вверх), то система в замкнутом состоянии устойчива.
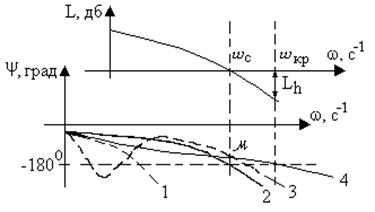
Рис. 5.14. ЛЧХ разомкнутой системы:
1 - система неустойчива;
2 - система нейтральная;
3 - система условно устойчивая;
4 - система абсолютно устойчивая
По ЛЧХ разомкнутой системы можно определить запасы устойчивости: запас по фазе m отсчитывается по ЛФХ на частоте среза wс, а запас по амплитуде Lh соответствует значению ЛАХ на критической частоте wкр, взятому с обратным знаком (кривая 4 на рис.5.14).
|
|
|
Если wс=wкр, то система находится на границе устойчивости.
Граничное значение общего коэффициента передачи разомкнутой системы kгр определяется из выражения
20 lg kгр = 20 lg k + Lh, (5.16)
где k - общий коэффициент передачи разомкнутой системы.
В заключение дадим некоторые рекомендации, которые следуют из практики проектирования систем. Во-первых, для того чтобы в системе были обеспечены необходимые запасы устойчивости, наклон ЛАХ в диапазоне частот, в котором расположена частота среза, должен быть равным -20дб/дек. При наклоне характеристики, равном -40дб/дек, трудно обеспечить необходимый запас устойчивости по фазе. При наклоне характеристики, равном 0 дб/дек, получают излишне большие запасы устойчивости по фазе, система становится передемпфированной с длительным переходным процессом. Во-вторых, запас устойчивости по фазе в системе зависит от диапазона частот, в котором ЛАХ разомкнутой системы на частоте среза имеет наклон -20дб/дек. Чем больше этот диапазон частот, тем выше запас устойчивости по фазе и наоборот.
ВОПРОСЫ К РАЗДЕЛУ 5
1. Дайте определение устойчивости системы с физической и математической точек зрения.
2. Какой характер имеет переходный процесс в устойчивой и неустойчивой системах?
3. Сформулируйте необходимое условие устойчивости.
4. Что такое критерии устойчивости?
5. Что такое граница устойчивости? Каким образом при этом расположены корни характеристического уравнения системы на плоскости комплексного переменного?
6. Сформулируйте критерий устойчивости Гурвица.
7. Каким образом по критерию Гурвица определяются границы устойчивости?
8. Сформулируйте критерий устойчивости Найквиста.
9. Что такое запасы устойчивости? Каким образом они определяются по АФЧХ разомкнутой системы?
|
|
|
10.Как определяются запасы устойчивости по ЛЧХ?
Содержание Глоссарий
ОЦЕНКА КАЧЕСТВА УПРАВЛЕНИЯ
вопросы
Общие понятия
Качество представляет собой комплексную оценку работы системы управления, включающую устойчивость, точность, быстродействие и зависящую от назначения системы.
Устойчивость системы обеспечивает затухание переходных процессов с течением времени, т.е. обеспечивает принципиальную возможность прихода системы в некоторое установившееся состояние при любом внешнем воздействии. Однако далее требуется, во-первых, чтобы это установившееся состояние было достаточно близко к заданному и, во-вторых, чтобы затухание переходного процесса было достаточно быстрым, а отклонения при этом были бы невелики.
Качество работы любой системы управления в конечном счете определяется величиной ошибки, равной разности между требуемым и действительным значениями управляемой величины: x(t)=g(t)-y(t).
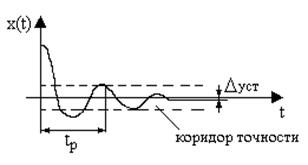
Рис. 6.1. Временная диаграмма изменения ошибки
Характер процесса изменения ошибки, представленного на рис.6.1, позволяет сделать вывод об устойчивости системы, так как процесс сходится, оценить точность работы системы по величине установившейся ошибки Dуст =x(¥) и оценить быстродействие системы по времени регулирования tр, то есть времени, за которое ошибка системы достигает допустимое значение и при дальнейшем росте времени не превышает его.
Процесс изменения ошибки во времени определяется решением дифференциального уравнения (4.1) динамики замкнутой системы
D(p)x(t) = Q(p)g(t) + N(p)f(t). (6.1)
Это решение включает в себя две составляющие
x(t) = xn(t) + xв(t), (6.2)
где xn(t) - общее решение однородного уравнения D(p)x(t)=0, представляющее собой переходный процесс в системе и имеющее вид
 , (6.3)
, (6.3)
причем ci - постоянные коэффициенты, определяемые из началь-ных условий процесса, а pi - корни характеристического уравнения D(p)=0;
xв(t) - частное или вынужденное решение определяется правой частью дифференциального уравнения динамики замкнутой системы (6.1) и представляет собой установившуюся часть процесса управления.
Таким образом, полное решение (6.2), описывающее процесс в линейной системе, представляет собой собственное движение системы xn(t), наложенное на установившуюся составляющую xB(t).
|
|
|
Знание мгновенного значения ошибки в течение всего времени работы системы дает возможность наиболее полно судить о ее свойствах.
Однако ошибка системы зависит не только от характеристик самой системы (полиномов D(p), Q(p), N(p)), но и от свойств, действующих на нее воздействий. Вследствие случайности задающего g(t) и возмущающего f(t) воздействий такой подход не может быть реализован. Поэтому приходится оценивать качество системы управления по некоторым ее свойствам, проявляющимся при различных типовых воздействиях. Для определения качественных показателей системы управления в этом случае используются так называемые критерии качества.
В настоящее время разработано большое число различных критериев качества, с помощью которых оценивается либо точность системы в установившемся состоянии, либо качество переходного процесса.
Точность системы задается и определяется в установившихся режимах величиной установившейся ошибки. Для анализа качества переходного процесса существует три основных вида приближенных оценок: частотные, корневые, интегральные.
|
|
|
