 |


Характеристика выбранных средств автоматизации
|
|
|
|
Введение
Структура управления — систематизированный (строго определенный) набор средств сбора сведений о подконтрольном объекте и средств воздействия на его поведение с целью достижения определённых целей. Объектом системы управления могут быть как технические объекты, так и люди. Объект системы управления может состоять из других объектов, которые могут иметь постоянную структуру взаимосвязей.
Дискретные САУ – это такие системы управления, в которой все элементы, устройства, сигналы могут принимать только два значения (лог. 0 или лог). Децентрализованная система управления- При децентрализованной системе управления полномочия распределяются по ниже стоящим уровням управления, в нутрии фирмы создаются производственные отделения, которые пользуются полной хозяйственной самостоятельностью. За высшим руководством фирмы сохраняются только функции контроля и координации деятельности подразделений, а также перспективного планирования. Все производственные подразделения несут ответственность за организацию производственно-сбытовой деятельности; каждое отделение самостоятельно финансирует свою деятельность, вступает в партнерские отношения с любыми третьими сторонами. Однако создание таких отделений не означает, что система управления кампанией является децентрализованной.
Граф функционирования – это графы переходов в наглядной для человека форме отображают переходы между состояниями, а так же «привязку» выходных воздействий автоматов к состояниям и/или переходам. Для упрощения изображения графов переходов допускается применение составных состояний, которые применяются только в тех случаях, когда несколько вершин имеют одинаково помеченные исходящие дуги.
|
|
|
САУ с путевым контролем – это такие САУ в которых выполнение каждого следующего движения или такта может быть начато, только после окончания предыдущего такта, о чем в систему придет подтверждение с обратного датчика.
Такт работы – Это промежуток времени между двумя чем-то различающимися состояниями элементов.
Словесное описание функциональной схемы
С нажатием кнопки «Пуск» (HS) питание подается на катушку реле K1 в следствии чего его контакты замыкаются и двигатель включается в цепь 3-х фазного напряжения подовая питание на катушку Y3. Вал электродвигателя приводится во вращение, при замыкании концевого выключателя S4 срабатывает датчик положения 1а передовая сигнал на контроллер вырабатывающий управляющее воздействие на включение катушки K2. Её контакты замыкаются включая двигатель M2 в сеть 3-х фазного напряжения. Приводя во вращение вал, вращение через редуктор передаётся на суппорт. Суппорт в процессе движения замыкает концевой выключатель S6, при замыкании которого срабатывает датчик положения 2а, сигнал с которого подается на контроллер вырабатывающий управляющее воздействие на включение катушки K3. Контакты реле K2 размыкаются, а контакты реле K3 замыкаются, включает обратный ход двигателя, вал приходит во вращение которое через редуктор передается на суппорт и суппорт также начинает обратный ход замыкая концевой выключатель S5. При замыкании выключателя S5 срабатывает датчик положения 3а, сигнал с которого подается на контроллер вырабатывающий управляющее воздействие на включение Y1. Это приводит к переключению 4-х канального 2-х позиционного пневмораспределителя во второе устойчивое состояние, приводя в движение шток пневмоцилиндра замыкающий концевой выключатель S2. При замыкании выключателя срабатывает датчик положения 4а сигнал скоторого поступает на контроллер вырабатывающий управляющее воздействие на включение Y3. это приводит к остановке двигателя M1 и замыканию концевого выключателя S3, при замыкании выключателя срабатывает датчик положения 5а сигнал с которого поступает на котроллер вырабатывающий управляющее воздействие на включение Y2. Что приводит к переключении 4-х канального 2-х позиционного пневмораспределителя и обратному ходу пневмоцилиндра завершающему цикл.
|
|
|
Характеристика выбранных средств автоматизации
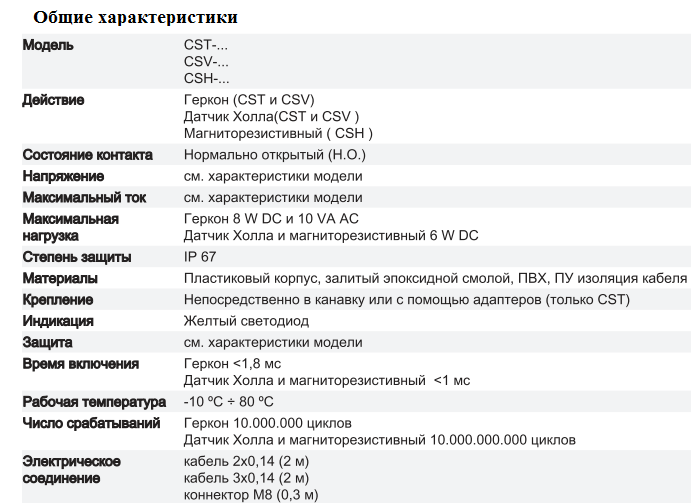
1)Магнитные датчики положения Camozzi. Серия CST-CSV.


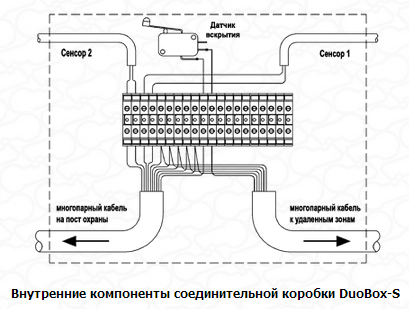
Соединительная коробка DuoBox-S


Блок питания БРП 12-01Л


Logo! 12/24


Распределители с электромагнитным управлением VOFC/VOFD,
Namur
Основные особенности:
1)Пневматическое или Электромагнитное управление с катушкой VACC
2) Электромагнитные катушки VACC
Напряжение:
• 24 В DC
• 230 В AC (50...60Гц)
Потребление энергии:
• 1,2-3,5 Вт
• Выбранные типы соответствуют директиве АТЕХ по взрывозащите
Варианты:
VOFC - 3/2-распределители непрямого управления
VOFD
- 3/2-распределители прямого действия
Датчики положения(концевые выключатели)
Пневмоцилиндры двухстороннего действия без демпфирования ISO 6431

|
|
|
