 |


Регулировка скорости вращения асинхронных двигателей
|
|
|
|
Контрольное задание
Контрольное задание выдается в виде двух задач посвященных расчетам параметров двигателей с регулируемой частотой вращения, данные для решения заданы в таблицах 1,2.
Номер варианта соответствует двум последним цифрам зачётной книжки, если этот номер больше 30, то необходимо отнять от данного номера 30, или число кратное тридцати, чтобы получить номер варианта. Например: две последние цифры зачетной книжки - 76, тогда 76-2×30=16, следовательно – вариант 16.
Решение задач осуществлять в соответствии с методикой, приведенной после заданий.
Задача 1. Посвящена расчету параметров двигателя в двигательном режиме и угла управления в рекуперативном режиме.
Регулирование скорости двигателя постоянного тока независимого возбуждения производится по схеме (рисунок 1). Номинальные данные двигателя: мощность Рном; напряжение Uном; угловая скорость ω; ток якоря Iя.ном; сопротивление якоря Rя; постоянная двигателя с  Ф; угол управления α; напряжение питания Uп;
Ф; угол управления α; напряжение питания Uп;
Индуктивность якорной цепи предполагается достаточной для обеспечения непрерывности тока якоря и отсутствия пульсаций.
1. В режиме выпрямления (в двигательном режиме) для угла управления α и номинального тока якоря необходимо рассчитать: момент и скорость двигателя и коэффициент мощности.
2.. В режиме инвертирования (рекуперативного торможения) полярность ЭДС двигателя изменяется на противоположную, например путем реверса потока возбуждения. Для этого режима требуется найти угол управления α, при котором в якорной цепи протекает номинальный ток, а также мощность, возвращаемую в питающую сеть.

Рисунок 1.
УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
|
|
|
Тиристорные преобразователи в электромеханических системах
Одним из основных видов регулируемых электромеханических систем являются системы с электродвигателями постоянного тока независимого возбуждения (ДПТ НВ). Для питания якорных цепей двигателей и обмоток возбуждения двигателей и генераторов используются полупроводниковые преобразователи напряжения. В большинстве современных преобразователей используются тиристоры.
Тиристорные преобразователи (ТП) напряжения переменного тока в постоянный имеют высокий КПД, малую инерционность, высокий коэффициент усиления по мощности и высокую надежность, обеспечиваемую быстродействующей защитой и блочным исполнением системы управления. Применение ТП для регулирования напряжения на якоре двигателя постоянного тока позволяет на 5... 7 % повысить КПД электропривода по сравнению с системой генератор—двигатель. Тиристорные преобразователи не содержат вращающихся частей, имеют меньшую массу, чем электромашинные преобразователи напряжения, и не требуют для своей установки дорогостоящих фундаментов.
Основные недостатки ТП: низкий коэффициент мощности при глубоком регулировании выпрямленного напряжения и значительное влияние мощных преобразователей на амплитуду и форму напряжений питающей сети. Кроме того, ТП обладают меньшей помехоустойчивостью и повышенным уровнем излучаемых радиопомех по сравнению с электромашинными преобразователями.
Неблагоприятное влияние на коэффициент мощности ТП оказывают высшие гармонические составляющие в кривой тока, потребляемого преобразователем из сети. Однако основная причина низкого значения коэффициента мощности ТП в режимах с глубоким регулированием заключается в сильном возрастании потребляемой преобразователем реактивной мощности при снижении выпрямленного напряжения.
|
|
|

Рисунок 2.
Функциональная схема ТП представлена на рисунке 1. Входной координатой ТП является напряжение управления Uу , выходной – выпрямленная ЭДС, определяемая как среднее на интервале проводимости значение в установившемся режиме Ed и в переходных процессах e d. Входной блок Б1 преобразует напряжение Uy в угол открывания тиристоров а, а выходной блок Б2 преобразует угол а в ЭДС ТП. Технически блок Б1 представляет собой систему импульсно-фазового управления (СИФУ), а блок Б2 — вентильную группу ВГ. Конструктивно вентильная группа состоит из комплекта тиристоров, предназначенных для определенного направления тока нагрузки.
На выходную координату ТП оказывает влияние возмущающее воздействие — ток нагрузки Id, который через функциональный блок нагрузки БН поступает на вход блока Б2. Влияние Id на Ed проявляется только в режиме прерывистых токов. В режиме непрерывных токов ЭДС ТП является функцией только угла открывания.
. Основные уравнения и режимы работы двигателей постоянного тока независимого возбуждения

Рисунок 3.
На рисунке 3 приведена схема двигателя постоянного тока независимого возбуждения ДПТ НВ при питании от выпрямителя, который может быть управляемым или полууправля-
|

Рисунок 4.
Квадранты II и IV соответствуют генераторному режиму работы ДПТ, который предполагает создание усилия на ротор двигателя для управления замедлением приводного механизма. В системе осуществляется обратная передача энергии: двигатель получает механическую энергию от приводного механизма и отдает ее в виде электрической энергии через преобразователь в питающую сеть или другому потребителю. При этом ДПТ работает в генераторном режиме.
Для вращения двигателя в прямом направлении (квадрант I) Uя, Ея и /я должны быть положительными; скорость и момент также положительными. При торможении из прямого вращения (квадрант II) двигатель вращается в прямом направлении, при этом ЭДС остается положительной. Для обеспечения отрицательного момента и рекуперации энергии ток якоря должен быть отрицательным. В этом случае питающее напряжение 1/я должно поддерживаться меньше, чем ЭДС Ея.
При вращении в обратном направлении (квадрант III) Uя, Ея и 1я отрицательны. Чтобы момент также был отрицательным, и энергия передавалась бы от источника к двигателю, ЭДС должна удовлетворять условию | 1/я I > | Ея |. Полярность Ея должна быть изменена на обратную путем изменения полярности тока возбуждения или переключением зажимов обмотки якоря. При торможении из обратного вращения (квадрант IV) U яи Ея остаются отрицательными. Для создания положительного момента и передачи энергии от двигателя к источнику ток якоря должен быть положительным. В этом случае наведенная ЭДС Ея должна удовлетворять условию \ UЯ\<\ Ея\.
|
|
|
Возможность работы электропривода в одном или нескольких квадрантах определяется выбранным преобразователем.
Преобразователи для регулирования скорости ДПТ подразделяются на однофазные и трехфазные. Выбор наиболее подходящей схемы для соответствующего применения преобразователя зависит от числа фаз питающей сети, мощности привода, допустимых пульсаций напряжения, необходимости изменения направления вращения и рекуперации энергии в сеть.
Полууправляемый преобразователь обеспечивает работу электропривода лишь на электрических характеристиках, расположенных в одном квадранте, так как направление напряжения и тока на его выходе неизменны. Полностью управляемый преобразователь обеспечивает работу в двух квадрантах, поскольку он дает возможность изменять по направлению напряжение на якоре двигателя, однако однонаправленная проводимость тиристоров не позволяет изменить направление тока через якорь двигателя. Преобразователи с двумя комплектами тиристоров позволяют регулировать скорость двигателя во всех четырех квадрантах. Двухкомплектные схемы с полууправляемыми мостами обеспечивают работу электропривода в двух квадрантах.
Задача 2 Посвящена расчету параметров асинхронного двигателя при инвертировании.
Трехфазный асинхронный двигатель с фазным ротором напряжением Uл ; частотой 50 Гц; включен по схеме вентильного каскада (рисунок 5). имеет следующие номинальные параметры схемы замещения (рисунок 6): r, r/, x1, x2/,x12. Отношение чисел витков фаз обмоток ротора к статорным К= w2/w1; Индуктивность L велика, поэтому выпрямленный ток имеет пренебрежительно малые пульсации. Отношение переменного напряжения преобразователя к питающему n2; Момент нагрузки М при n. Рассчитать для случая когда двигатель работает при частоте вращения n1; ток в индуктивности Id; напряжение постоянного тока Ed; угол опережения инвертора β; КПД η. Скорость вращения магнитного поля ω0. Потерями пренебречь.
|
|
|


Рисунок 5 Рисунок 6
Регулировка скорости вращения асинхронных двигателей
Скорость асинхронного двигателя можно регулировать изменением напряжения, подводимого к статору, при этом частота напряжения на двигателе не изменяется и равна стандартной частоте сети 50 Гц.
Для регулирования напряжения на статоре АД в настоящее время наибольшее распространение получили тиристорные регуляторы напряжения (ТРН), которые обладают большим быстродействием, высоким КПД, небольшой стоимостью, простотой обслуживания. Трехфазная схема ТРН для регулирования напряжения на статоре АД, построенная на основе однофазных схем ТРН представлена на рис. 7, а. Она состоит из шести тиристоров VS1... VS6. В каждую фазу трехфазного ТРН включаются два тиристора по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U 1. Тиристоры получают импульсы управления Ua от системы импульсно-фазового управления (СИФУ), которая обеспечивает их сдвиг на угол управления а в функции внешнего сигнала Uу Изменяя угол управления а от 0 до 180°, можно регулировать напряжение на статоре от полного напряжения сети U1 до нуля.

Рисунок 7.
ТАБЛИЦА 1
| № пп | Рном, кВт | Uном, В | ω рад/c | Iя ном, А | Rя, Ом | с∙Ф, В∙с | α,град. | Uп, В |
| 7,8 | 0,35 | 1,75 | ||||||
| 0,33 | 1,83 | |||||||
| 0,26 | 1,68 | |||||||
| 8,7 | 0,22 | 1,77 | ||||||
| 11,2 | 0,21 | 1,74 | ||||||
| 0,24 | 1,85 | |||||||
| 10,5 | 0,31 | 1,88 | ||||||
| 0,28 | 1,72 | |||||||
| 0,13 | 1,68 | |||||||
| 8,5 | 0,18 | 1,85 | ||||||
| 0,07 | 1,83 | |||||||
| 0,05 | 1,77 | |||||||
| 0,11 | 1,75 | |||||||
| 19,3 | 0,08 | 1,83 | ||||||
| 0,07 | 1,81 | |||||||
| 22,5 | 0,1 | 1,78 | ||||||
| 20,3 | 0,11 | 1,82 | ||||||
| 30,5 | 0,08 | 1,76 | ||||||
| 0,09 | 1.72 | |||||||
| 18,5 | 0,12 | 1,78 | ||||||
| 0,14 | 1,75 | |||||||
| 0,05 | 1,74 | |||||||
| 9,5 | 0,17 | 1,77 | ||||||
| 0,08 | 1,81 | |||||||
| 0,18 | 1,79 | |||||||
| 0, 12 | 1,82 |
Продолжение ТАБЛИЦЫ 1
|
|
|
| 0,06 | 1,81 | |||||||
| 0,18 | 1,84 | |||||||
| 11,5 | 0,16 | 1,77 | ||||||
| 25,5 | 0,05 | 1,76 | ||||||
| 0,1 | 1,74 |
ТАБЛИЦА 2
| № пп | Uл, В | r Ом | r′ Ом | x1 Ом | x2′ Ом | x12 Ом | К | n мин-1 | M Н∙м | n2 | n1 мин-1 | ω0 рад/c |
| 0,02 | 0,03 | 0,17 | 0,28 | 3,78 | 0,9 | 0,4 | 104,66 | |||||
| 0,04 | 0,05 | 0,22 | 0,45 | 6,45 | 0,95 | 0,45 | ||||||
| 0,08 | 0,09 | 0,57 | 0,88 | 9,24 | 0,85 | 0,35 | 78,5 | |||||
| 0,03 | 0,04 | 0,19 | 0,31 | 3,95 | 0,9 | 0,4 | ||||||
| 0,09 | 0,11 | 0,61 | 0,92 | 9,55 | 0,85 | 0,5 | 104,66 | |||||
| 0,05 | 0,06 | 0,26 | 0,48 | 6,78 | 0,9 | 0,45 | 78,5 | |||||
| 0,05 | 0,07 | 0,24 | 0,51 | 6,93 | 0,85 | 0,4 | ||||||
| 0,04 | 0,05 | 0,15 | 0,25 | 3,59 | 0,95 | 0,35 | ||||||
| 0,03 | 0,04 | 0,21 | 0,43 | 6,35 | 0,9 | 0,4 | 104,66 | |||||
| 0,02 | 0,03 | 0,18 | 0,27 | 3,67 | 0,95 | 0,45 | ||||||
| 0,07 | 0,08 | 0,55 | 0,85 | 9,33 | 0,85 | 0,35 | 78,5 | |||||
| 0,09 | 0,1 | 0,52 | 0,87 | 9,76 | 0,9 | 0,4 | ||||||
| 0,01 | 0,02 | 0,15 | 0,26 | 6,12 | 0,85 | 0,5 | 104,66 | |||||
| 0,04 | 0,05 | 0,24 | 0,45 | 6,41 | 0,9 | 0,45 | 78,5 | |||||
| 0,03 | 0,04 | 0,16 | 0,23 | 3,32 | 0,9 | 0,4 | ||||||
| 0,05 | 0,06 | 0,24 | 0,47 | 6,82 | 0,95 | 0,35 | 104,66 | |||||
| 0,02 | 0,03 | 0,17 | 0,22 | 3,35 | 0,85 | 0,4 | ||||||
| 0,03 | 0,04 | 0,14 | 0,26 | 3,56 | 0,9 | 0,45 | 78,5 | |||||
| 0,04 | 0,05 | 0,23 | 0,47 | 5,98 | 0,85 | 0,35 |
Продолжение ТАБЛИЦЫ 2
| 0,09 | 0,1 | 0,48 | 0,82 | 10,1 | 0,9 | 0,4 | 104,66 | |||||
| 0,05 | 0,06 | 0,25 | 0,46 | 7,05 | 0,95 | 0,45 | ||||||
| 0,04 | 0,05 | 0,23 | 0,45 | 6,72 | 0,85 | 0,35 | 78,5 | |||||
| 0,09 | 0,1 | 0,52 | 0,86 | 9,45 | 0,9 | 0,4 | ||||||
| 0,03 | 0,04 | 0,18 | 0,21 | 3,22 | 0,85 | 0,5 | 104,66 | |||||
| 0,06 | 0,07 | 0,22 | 0,43 | 6,34 | 0,9 | 0,45 | 78,5 | |||||
| 0,05 | 0,06 | 0,24 | 0,46 | 6,74 | 0,9 | 0,4 | ||||||
| 0,08 | 0,09 | 0,55 | 0,79 | 9,59 | 0,95 | 0,35 | ||||||
| 0,02 | 0,03 | 0,16 | 0,22 | 3,63 | 0,85 | 0,4 | 104,66 | |||||
| 0,06 | 0,07 | 0,23 | 0,44 | 6,46 | 0,9 | 0,45 | ||||||
| 0,07 | 0,08 | 0,51 | 0,88 | 9,55 | 0,85 | 0,35 | 78,5 | |||||
| 0,04 | 0,05 | 0,24 | 0,47 | 6,73 | 0,9 | 0,4 |
Пример решения задачи 1.
Регулирование скорости двигателя постоянного тока независимого возбуждения производится по схеме (рисунок 8). Номинальные данные двигателя: мощность Рном= 7,5 кВт; напряжение Uном = 230 В; угловая скорость ω= 126 рад/c; ток якоря Iя.ном = 38А; сопротивление якоря Rя=0,3Ом; постоянная двигателя с Ф= 1,74 В∙с; угол управления α=30 град; напряжение питания Uп =260 В;
Индуктивность якорной цепи предполагается достаточной для обеспечения непрерывности тока якоря и отсутствия пульсаций.
1. В режиме выпрямления (в двигательном режиме) для угла управления α и номинального тока якоря необходимо рассчитать: момент и скорость двигателя и коэффициент мощности.
2. В режиме инвертирования (рекуперативного торможения) полярность ЭДС двигателя изменяется на противоположную, например путем реверса потока возбуждения. Для этого режима требуется найти угол управления α, при котором в якорной цепи протекает номинальный ток, а также мощность, возвращаемую в питающую сеть.

Рисунок 8
Решение
1. Режим выпрямления (двигательный режим).
Определяем момент двигателя:
М=с∙Ф∙Iя=1,74∙38=66,1 Н∙м
Напряжение на якоре определяется по формуле:


Пример решения задачи 2
Трехфазный асинхронный двигатель с фазным ротором напряжением Uл =380В; частотой 50 Гц; включен по схеме вентильного каскада (рисунок 9). имеет следующие номинальные параметры схемы замещения (рисунок 10): r=0,041 Ом, r/= 0,044 Ом, x1=0,29 Ом, x2/=0,44 Ом,x12=6,,1 Ом. Отношение чисел витков фаз обмоток ротора к статорным К= w2/w1=0,9; Индуктивность L велика, поэтому выпрямленный ток имеет пренебрежительно малые пульсации. Отношение переменного напряжения преобразователя к питающему n2=0,4; Момент нагрузки М=750 Н∙м при n= 910 мин-1. Рассчитать для случая когда двигатель работает при частоте вращения n1=850 мин-1; ток в индуктивности Id; напряжение постоянного тока Ed; угол опережения инвертора β; КПД η. Скорость вращения магнитного поля ω0. Потерями пренебречь.

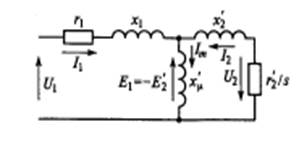
Рисунок 9 Рисунок 10


Без учета параметров двигателя выпрямленный ток равен:
 .
.
Определяем выпрямленное напряжение, которое для инвертора имеет
обратный знак:
 .
.
Входное напряжение переменного тока инвертора:
 .
.
Так как при ХХ  , то:
, то:
 ,
,
откуда  .
.
Скорость определяется следующими независимостями:
 ;
;
 ;
;
95,24-104,66=


Угол опережения при этом:  .
.
Выходная мощность:
 .
.
Действующее значение тока ротора, приведенное к числу витков статора:

Электрические потери в статоре  и ротора
и ротора  :
:


Суммарная мощность:

Коэффициент полезного действия, %:

|
|
|
