 |


Примеры различных видов групп Ассура
|
|
|
|
| Класс | Пор | Вкл | Схема | И | Р | Пример механизма |
| 
| |||||

| 
|
Окончание табл. 2.1
| Класс | Пор | Вкл | Схема | И | Р | Пример механизма |

| 
| |||||

| 
| |||||

| 
| |||||

| 
| |||||

|
Контрольные вопросы
1. Для чего предназначен механизм?
2. Какая кинематическая цепь является механизмом?
3. Что такое шатун?
4. Что является кинематической парой?
5. Какая кинематическая пара относится к 5-му классу?
6. Какая кинематическая пара относится к 1-му классу?
7. Какая кинематическая пара является плоской?
8. Какая кинематическая пара является низшей?
9. Сколько неподвижных звеньев в 6-звенном механизме?
10. Чему равна степень подвижности группы Ассура?
11. Чему равна степень подвижности группы начальных звеньев, состоящей из стойки и одного подвижного звена?
12. Чем определяется класс группы Ассура?
13. Чем определяется порядок группы Ассура?
14. Чем определяется класс и порядок механизма по классификации Л.В. Ассура?
Полностью материал по данной теме изложен в учебниках [1, с. 38-66], [2, с. 22-43], [3, с. 6-31], [4, с. 7-13], [5, с. 32-66], [6, с. 11-14].
2.2. Лекция №2. Кинематический анализ механизмов
Задачей кинематического анализа является нахождение траекторий, скоростей и ускорений точек звеньев механизма, угловых скоростей и угловых ускорений звеньев механизма. Исходные данные: кинематическая схема механизма (с размерами звеньев) и закон движения начального звена (обычно – кривошипа). Методы кинематического анализа: метод планов, метод кинематических диаграмм, аналитический метод (метод замкнутого векторного контура).
|
|
|
На стадии установившегося движения достаточно произвести кинематический анализ в пределах одного цикла (периода изменения обобщенной координаты начального звена), как правило, это один или два оборота кривошипа. Движение выходных и промежуточных звеньев определяется в два этапа:
1. Устанавливается зависимость кинематических параметров звеньев и точек от обобщенной координаты (функции положения и передаточные функции).
2. Определяется закон изменения обобщенной координаты во времени (после динамического анализа) и, соответственно, кинематические параметры остальных звеньев от времени.
В качестве примера рассмотрим очередность определения кинематических параметров для механизмов с одной степенью свободы (рис. 2.1 и 2.3) при заданной обобщенной координате j1 (t). Для механизма, изображенного на рис. 2.3, искомыми параметрами являются угловые перемещения третьего звена j3 (t), его угловая скорость w3 (t) и угловое ускорение e3 (t). При нахождении углового перемещения j3 (t) на первом этапе определяют функцию положения – это зависимость координаты выходного звена (звена 3) от обобщенной координаты j3 (j1), а затем угловое перемещение от времени j3 (t).
j3 (j1) ® j1 (t) ® j3 (t). (2.4)
 |

Р и с. 2.3. Четырехшарнирный механизм
Угловая скорость w3 (t) и угловое ускорение e3 (t) соответственно равны:
 , (2.5)
, (2.5)
где  – аналог угловой скорости звена;
– аналог угловой скорости звена;
U31 =  – передаточное отношение.
– передаточное отношение.
e3(t) =  (2.6)
(2.6)
где  – аналог углового ускорения третьего звена;
– аналог углового ускорения третьего звена;
 – угловое ускорение начального звена.
– угловое ускорение начального звена.
Для механизма, изображенного на рис. 2.1, определению подлежат S3 (t), V3 (t), a3 (t) – перемещение, скорость и ускорение третьего звена.
 (2.7)
(2.7)
 (2.8)
(2.8)
где  – аналог скорости третьего звена.
– аналог скорости третьего звена.
 , (2.9)
, (2.9)
где  – аналог ускорения третьего звена.
– аналог ускорения третьего звена.
В частном случае, при  вторые слагаемые выражений (2.6) и (2.9) равны нулю.
вторые слагаемые выражений (2.6) и (2.9) равны нулю.
Метод планов включает в себя планы механизма, скорости и ускорения. План механизма – это графическое изображение в масштабе взаимного расположения звеньев при заданном значении обобщенной координаты.
|
|
|
Планы скоростей и ускорений – это соответствующие графические изображения в виде пучка векторов абсолютных скоростей или ускорений точек звеньев и отрезков, соединяющих концы векторов, представляющих относительные скорости и ускорения точек в данном положении механизма. Точку, из которой откладываются вектора, называют полюсом. Обычно за полюс принимают стойку. При построении планов используют масштабные коэффициенты, представляющие отношение некоторой физической величины к изображающему ее отрезку на чертеже: ml (м/мм), mV (м/с/мм), ma (м/с2/мм). План механизма строят в 8 или 12 последовательных положениях, начиная с начального звена (в пределах одного периода изменения обобщенной координаты) рис. 2.4.
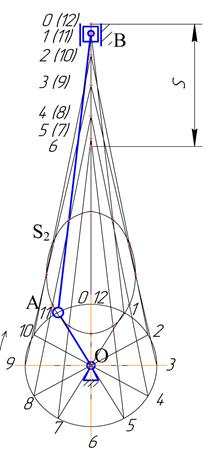
Р и с. 2.4. План кривошипно-ползунного механизма
Положения остальных звеньев находят методом засечек. За нулевое принимают то положение механизма, в котором ведомое (выходное) звено занимает одно из крайних положений ("мертвая точка"). Расчеты при построении планов скоростей и ускорений начинают с нахождения абсолютных скорости и ускорения точки начального звена, угловую скорость которого принимаем постоянной (рис. 2.5):
w1 =pn/30 (с-1). (2.10)
Поэтому строящиеся планы представляют собой планы возможных скоростей и ускорений. Их используют для приблизительной оценки скоростей и ускорений. Дальнейшее построение планов производится последовательным наслоением планов групп Ассура. Для этого используется теорема о сложении скоростей и ускорений. Абсолютная скорость точки Vi звена равна векторной сумме переносной Vj и относительной скоростей Vij. Абсолютное ускорение точки ai равно векторной сумме переносного aj и относительного aij ускорений, причем последний состоит из двух составляющих: нормальной  , направленной по радиусу к центру кривизны траектории, и тангенциальной
, направленной по радиусу к центру кривизны траектории, и тангенциальной  , направленной перпендикулярно радиусу кривизны
, направленной перпендикулярно радиусу кривизны
 ;
; 
 . (2.11)
. (2.11)
Пример (рис. 2.4 (положение 11)):
Дано: ОА, АВ,  .
.
Скорость точки А равна  .
.
Выбираем масштаб плана скоростей  (рис. 2.5) и из точки Р, называемой полюсом, откладываем вектор
(рис. 2.5) и из точки Р, называемой полюсом, откладываем вектор  перпендикулярно звену ОА. Этот вектор изображает в выбранном масштабе абсолютную скорость точки А. Далее записываем векторные уравнения для скорости точки В и решаем их графически:
перпендикулярно звену ОА. Этот вектор изображает в выбранном масштабе абсолютную скорость точки А. Далее записываем векторные уравнения для скорости точки В и решаем их графически:
|
|
|
 (2.12)
(2.12)
Планы скоростей и ускорений обладают изобразительными свойствами, то есть на них получают фигуры, подобные плану механизма, таким образом, находятся VS2 и аS2.
Угловая скорость любого звена по модулю равна отношению вектора относительной скорости к плечу:
 . (2.13)
. (2.13)
Для нахождения направления угловой скорости вектор относительной скорости Vij мысленно помещают в искомую точку (т. i), принимая известную точку j за неподвижную.
Ускорение точки А равно:
 . (2.14)
. (2.14)
Выбираем масштаб плана ускорений  и откладываем из точки Р вектор параллельно ОА от точки А к центру вращения. Он изображает в выбранном масштабе абсолютное ускорение точки А. Векторные уравнения абсолютного ускорения точки В имеют вид:
и откладываем из точки Р вектор параллельно ОА от точки А к центру вращения. Он изображает в выбранном масштабе абсолютное ускорение точки А. Векторные уравнения абсолютного ускорения точки В имеют вид:
 (2.15)
(2.15)
где
 (мм). (2.16)
(мм). (2.16)
| |||||
 | |||||
| |||||

|

|
Р и с. 2.5. Планы скоростей и ускорений
и направлен от В к А,  – отрезок на плане скоростей.
– отрезок на плане скоростей.
Планы скоростей и ускорений рассматриваемого механизма изображены на рис. 2.5.
Угловое ускорение звена по модулю равно отношению тангенциальной составляющей относительного ускорения к плечу. Для определения направления  вектор тангенциального ускорения помещаем в точку i, считая точку j за неподвижную
вектор тангенциального ускорения помещаем в точку i, считая точку j за неподвижную
 . (2.17)
. (2.17)
Метод кинематических диаграмм позволяет графическим способом определять положения отдельных точек звеньев, их скорости и ускорения. Построение начинают с плана механизма. Период изменения обобщенной координаты изображают на оси абсцисс произвольным отрезком L (мм), который разделен на части, пропорциональные углу поворота кривошипа, начиная с начального положения. По оси ординат в масштабе  откладываются перемещения интересуемой точки по отношению к ее позиции в начальном положении механизма. Соединяя полученные точки плавной кривой, получим диаграмму перемещения рассматриваемой точки в масштабах
откладываются перемещения интересуемой точки по отношению к ее позиции в начальном положении механизма. Соединяя полученные точки плавной кривой, получим диаграмму перемещения рассматриваемой точки в масштабах
|
|
|

 . (2.18)
. (2.18)
Построение диаграмм аналога скорости и аналога ускорения производится методом графического дифференцирования, имея в виду, что  tg
tg  , а
, а  . Рассмотрим алгоритм построения графика аналога скорости
. Рассмотрим алгоритм построения графика аналога скорости  . Весь график
. Весь график  разбиваем на элементарные участки, заменяя его хордами. На будущем графике аналога скорости выбираем полюсное расстояние Н= (20-50) мм, из которого проводим линии, параллельные хордам. Точки пересечения этих линий с осью ординат являются значениями аналогов скоростей на серединах соответствующих участков в масштабе
разбиваем на элементарные участки, заменяя его хордами. На будущем графике аналога скорости выбираем полюсное расстояние Н= (20-50) мм, из которого проводим линии, параллельные хордам. Точки пересечения этих линий с осью ординат являются значениями аналогов скоростей на серединах соответствующих участков в масштабе  =
=  ,
,  . Аналогично, графически дифференцируя график аналога скорости, получаем график аналога ускорения
. Аналогично, графически дифференцируя график аналога скорости, получаем график аналога ускорения  в масштабе
в масштабе
 , ,
, ,
где Н1, H2 – полюсные расстояния при дифференцировании.
Если w1 = const, то ось абсцисс является не только осью перемещений, но и одновременно осью времени в масштабе:
 , (2.19)
, (2.19)
где Т – время одного оборота кривошипа.
 (с). (2.20)
(с). (2.20)
При w1 = const полученные диаграммы являются одновременно диаграммами скорости и ускорения исследуемой точки в масштабах
 ,
,  ;
;  ,
,  . (2.21)
. (2.21)
Метод замкнутого векторного контура заключается в том, что звенья механизма изображают в виде векторов, которые образуют на схеме механизма замкнутый контур. Затем составляются векторные уравнения замкнутости каждого контура. Проецируя эти уравнения на оси координат, получают аналитические зависимости положений звеньев от обобщенной координаты (функции положений). За обобщенную координату в дальнейшем принимается угол поворота кривошипа  . Дифференцируя по времени или по обобщенной координате уравнения проекций, получают формулы для определения скоростей и ускорений и их аналогов.
. Дифференцируя по времени или по обобщенной координате уравнения проекций, получают формулы для определения скоростей и ускорений и их аналогов.
Условие замкнутости кинематической цепи механизма, изображенного на рис. 2.6, представляется векторным уравнением
 . (2.22)
. (2.22)
Из геометрических соображений находим координаты точек А и В, а также тригонометрические функции угла  :
:
 ;
;  ; (2.23)
; (2.23)
 ; (2.24)
; (2.24)
 ;
;  . (2.25)
. (2.25)





Р и с. 2.6. Векторный контур кривошипно-ползунного механизма
Уравнение замкнутости векторного контура (2.22) в проекциях на оси X и Y имеют вид
 ;
;
 sin
sin  +
+  sin
sin  = YВ = e =const. (2.26)
= YВ = e =const. (2.26)
После дифференцирования второго уравнения (2.26) по  и преобразований получим
и преобразований получим
 , (2.27)
, (2.27)
где  – аналог скорости звена 2.
– аналог скорости звена 2.
Дифференцирование первого уравнения 2.26 дает
 , (2.28)
, (2.28)
где и 31  – аналог скорости звена 3.
– аналог скорости звена 3.
Дифференцируя выражения (2.27) и (2.28) по еще раз, получим
 . (2.29)
. (2.29)
При этом аналог ускорения звена 2

 . (2.30)
. (2.30)
Соответственно ускорение точки В равно
 , (2.31)
, (2.31)
где  – аналог ускорения звена 3.
– аналог ускорения звена 3.
Для определения кинематических характеристик центра масс шатуна т. S 2 рассмотрим векторный контур  , при этом
, при этом  , где
, где  – проекция на ось Х аналога скорости т. S2.
– проекция на ось Х аналога скорости т. S2.
|
|
|
 , где
, где  – проекция на ось Y аналога скорости т. S 2.
– проекция на ось Y аналога скорости т. S 2.
 ; (2.32)
; (2.32)
 ; (2.33)
; (2.33)
 , (2.34)
, (2.34)
где  ;
;
 ;
;
 .
.
Контрольные вопросы (см. рис. 2.1)
1. Какой вектор на плане скоростей изображает скорость точки S2 звена АВ?
2. С помощью, какой скорости можно определить угловую скорость звена АВ?
3. Для какого положения механизма скорость точки А равна скорости точки В?
4. Для какого положения механизма скорость точки В равна нулю?
5. Для какого положения механизма скорость точки А равна относительной скорости звена АВ?
6. Для какого положения механизма относительная скорость звена AВ равна нулю?
7. С помощью какого ускорения можно определить угловое ускорение звена АВ?
8. Вектор какого ускорения определяет направление углового ускорения звена АВ?
9. Для какого положения механизма угловая скорость звена АВ равна нулю?
10. Для какого положения механизма угловое ускорение звена АВ равно нулю?
11. Угловая скорость кривошипа рычажного механизма постоянна. Угловое ускорение какого звена этого механизма будет равно нулю?
12. Какое положение является крайним ("мертвым") для центрального кривошипно-шатунного механизма?
13. Рычажный механизм состоит из группы начального звена и трех групп Ассура. С какой группы следует начинать кинематический расчет этого механизма?
14. Какой из методов кинематического анализа дает наибольшую точность?
15. Вектора каких скоростей (ускорений) исходят из полюса плана скоростей (плана ускорений)?
16. Как направлен вектор скорости точки А кривошипа ОА при известном направлении его вращения?
17. Как направлено ускорение точки А кривошипа ОА, если его угловая скорость постоянна?
18. Какой вектор на плане скоростей изображает относительную скорость звена АВ?
Полностью материал по данной теме изложен в учебниках [1, с. 67-125], [2, с. 78-96], [3, с. 33-64], [4, с. 13-21], [5, с. 47-100], [6, с. 82-102].
2.3. Лекция №3. Силовой анализ механизма
Задачами силового анализа являются: определение реакций в кинематических парах и вычисление уравновешивающего момента, являющегося реактивным со стороны отсоединенной части машинного агрегата.
Определение реакций в кинематических парах методом планов сил (кинетостатический расчет) основано на двух принципах:
а) принцип Даламбера – когда механическая система, не имеющая внешних связей, с учетом инерционных сил, находится в равновесии, т.е. к ней применимы уравнения статики;
б) принцип отделимости: от механизма, начиная с исполнительного звена, отсоединяются статически определимые группы Ассура. Точки разрыва между группой и оставшейся частью механизма заменяются реакциями, которые находятся по уравнениям статики.
Исходными данными для силового анализа являются: кинематическая схема с результатами кинематического анализа и значения всех внешних сил. Внешние силы разделяют на пять классов в зависимости от их возникновения и воздействия на машину:
1. Движущие силы Fдс, Мдс, приводящие машину в движение, являются исходными данными для машин-двигателей. Как правило, их задают в виде индикаторной диаграммы.
2. Силы полезного сопротивления Fпс, Мпс задают для рабочих машин. Зависимость, определяющая закон изменения сил полезного сопротивления, приложенных к исполнительному звену, называется механической характеристикой.
Например:
Fпс =const (грузоподъемные машины, металлорежущие станки);
Fпс = f (V) (вентиляторы, центробежные насосы, гребные винты);
Fпс = f (S) (компрессоры, насосы, прессы);
Fпс = f (t) (камнедробилки, тестомесильные машины, машины химического и нефтехимического производств);
Fпс = f (S,V) (транспортные машины).
3. Силы вредного сопротивления Fвс, Mвс.
4. Веса звеньев G=  .
.
5. Инерционные силы  =-
=-  и моменты сил инерции
и моменты сил инерции  .
.
Силами вредного сопротивления при расчетах в первом приближении пренебрегают.
Пример схемы внешних сил для кривошипно-ползунного механизма, кинематика которого рассмотрена во второй лекции (рис. 2.4) представлен на рис. 2.7.
Иногда удобно избавиться от момента сил инерции MФи путем параллельного переноса главного вектора сил инерции на плечо 
 , при этом система инерционных нагрузок эквивалентно заменяется одной результирующей силой
, при этом система инерционных нагрузок эквивалентно заменяется одной результирующей силой  , приложенной в точке К (рис. 2.8). Алгоритм определения реакций для группы Ассура (рис. 2.9) следующий:
, приложенной в точке К (рис. 2.8). Алгоритм определения реакций для группы Ассура (рис. 2.9) следующий:
  Р и с. 2.7. Схема
внешних сил
Р и с. 2.7. Схема
внешних сил
|
  Р и с. 2.8. Определение результирующей силы
Р и с. 2.8. Определение результирующей силы
|
Р и с. 2.9. Определение реакций в группе Ассура |

Возможны две схемы присоединения кривошипа к двигателю:
1. Когда двигатель и кривошип совпадают, т.е. кривошип прикреплен к выходному валу двигателя (рис. 2.10).
2.
|

|


Р и с. 2.10. Схема сил кривошипа
3. Кривошип присоединен к двигателю через редуктор, где rВ – радиус основной окружности (рис. 2.11).
 
| 
|
Р и с. 2.11. Схема сил кривошипа с редуктором
Приведение сил основано на принципе возможных перемещений, согласно которого работа всех внешних сил на соответствующие им элементарные перемещения равна нулю.
 (2.35)
(2.35)
Если рассматривается рабочая машина, то все силы сопротивления могут быть заменены одной силой или одним моментом, где сила и момент называются приведенными.
Мощность этой силы равна сумме мощностей приводимых сил. Как правило, приведенную силу помещают в т. А кривошипа, а приведенный момент рассматривают относительно т. О.
 . (2.36)
. (2.36)
Для машины-двигателя ситуация рассматривается подобным способом:
 (2.37)
(2.37)
Графической интерпретацией принципа возможных перемещений является Рычаг Жуковского, когда на план скоростей, повернутый на 90 градусов вокруг полюса, в соответствующие точки прикладываются все внешние силы. Сумма моментов этих сил вокруг полюса с учетом уравновешивающей равна нулю.
Приведение масс основано на равенстве кинетических энергий
 . (2.38)
. (2.38)

Приведенная масса mп или приведенный момент инерции Jп – это такие фиктивные величины, кинетическая энергия которых равняется сумме кинетических энергий звеньев, составляющих механизм. Приведенную массу обычно приводят в т. А, а приведенный момент – относительно т. О кривошипа.
Контрольные вопросы
1. На каких принципах или законах основан кинетостатический расчет механизмов?
2. На каком принципе или законе основан метод "жесткого рычага" Жуковского?
3. К чему приводятся элементарные силы инерции звена, совершающего равномерное вращательное движение вокруг оси, не проходящей через центр тяжести звена?
4. К чему приводятся элементарные силы инерции звена, совершающего неравномерное вращательное движение вокруг оси, не проходящей через центр тяжести звена?
5. К чему приводятся элементарные силы инерции звена, совершающего плоскопараллельное движение?
6. К чему приводятся элементарные силы инерции звена, совершающего поступательное движение?
7. К чему приводятся элементарные силы инерции звена, совершающего неравномерное вращательное движение при совпадении центра тяжести с центром вращения звена?
8. Почему момент сил инерции кривошипа, совершающего равномерное вращательное движение, равен нулю?
9. Что является неизвестным при определении реакции во вращательной паре?
10. Что является неизвестным при определении реакции в поступательной паре?
11. В чем заключается условие статической определимости групп Ассура?
12. В какой последовательности выполняется силовой расчет механизма?
13. Из какого уравнения статики находят реакции во внутренних кинематических парах групп Ассура?
14. Какая сила определяется по методу "жесткого рычага" Жуковского?
15. Какие силы являются основными расчетными нагрузками, если сила полезного сопротивления мала, а ускорения звеньев значительны?
16. Как направлен главный вектор сил инерции шатуна АВ?
17. Как направлен главный момент сил инерции шатуна АВ?
18. Каким моментом является уравновешивающий момент?
19. Что не требуется для определения уравновешивающего момента по методу "жесткого рычага" Жуковского?
20. На каких принципах основано приведение сил?
21. На каких принципах основано приведение масс?
Полностью материал по данной теме изложен в учебниках: [1, с. 171-188], [2, с. 97-109], [3, с. 65-92], [4, с. 22-26], [5, с. 186-223], [6, с. 141-172].
2.4. Лекция №4. Динамический анализ механизмов
Рассмотрим гипотетический кривошип. Угол поворота кривошипа j является обобщенной координатой. На кривошип действует приведенный момент Мп, он сам обладает моментом инерции Jп и имеет угловую скорость w (рис. 2.12).
 |
|
|
|

Р и с. 2.12. Динамическая модель машины
с одной степенью свободы
В рассматриваемом положении дифференциал кинетической энергии кривошипа равен дифференциалу работ всех внешних сил:
dT = dA; (2.39)
dA = Мп . dj; dT = d (Jп . w 2/2).
Отсюда
Мп = dJп / dj . w 2/2+ dw / dt . Jп. (2.40)
Это уравнение движения машинного агрегата в дифференциальной форме.
Частные случаи:
1. Jп =const, Мп =const – центрифуги, турбины, воздуходувки, смесители, турбины, прокатные станы, печатные машины и т.д.
Мп = e . Jп. (2.41)
Применим II закон Ньютона.
2. Мп (j), Jп (j) – компрессоры, насосы, механические прессы, строгальные станки, дробилки и т.д.
Общее уравнение (2.40) интегрируется в квадратурах. Уравнение (2.39) можно представить в виде уравнения движения механизма в энергетической форме, применяя теорему об изменении кинетической энергии: изменение кинетической энергии механизма ΔТ происходит за счет работы всех сил ΔА
DT = T - Tн = DА = Ад – Апс ± Ад, (2.42)
где Т = Jп . w 2/2 – текущее значение кинетической энергии механизма;
Тн = Jпн . wн 2/2 – начальное значение кинетической энергии механизма.
 (2.43)
(2.43)
Анализ уравнения (2.43) позволяет сделать вывод о том, что угловая скорость кривошипа является функцией обобщенной координаты, то есть меняется в пределах одного цикла. Определение этой закономерности является важнейшей задачей анализа механических систем.
3. Jп (j); Мп = Мд (ω) – Мс(j) – станки с асинхронным электродвигателем, технологические машины. Решение в виде численного интегрирования с помощью ЭВМ
Мп = Мд (ω) – Мс(j) = Jп (j) dω/dt +dJ(j)/dj ·ω2 /2. (2.44)
Коэффициенты уравнения (2.44) задают таблично или графически, используя графоаналитические методы.
Рассмотрим динамический анализ на стадии установившегося движения (рис. 2.13). Задача конструктора – создать машину, у которой колебания угловой скорости кривошипа по отношению к средней ωс будут сведены к минимуму.
На стадии установившегося движения вводится коэффициент неравномерности вращения d:
 , (2.45)
, (2.45)
где  .
.

Р и с. 2.13. Стадии работы машинного агрегата:
I – разгон Адц>Асц, когда работа движущих сил за цикл больше работы
сил сопротивления; II – стадия установившегося движения
при Адц=Асц; III – выбег или останов для Адц< Асц
Вычисление момента инерции кривошипа на стадии установившегося движения удобно производить методом Мерцалова. Кинетическую энергию машины Т представляют в виде суммы двух слагаемых
 , (2.46)
, (2.46)
где ТI – кинетическая энергия звеньев, приведенный момент инерции которых  постоянен;
постоянен;
ТII – кинетическая энергия звеньев, приведенный момент инерции которых  переменен.
переменен.
Ввиду того, что  , то
, то  . Предположим, что известны
. Предположим, что известны  ,
,  (рис. 2.14).
(рис. 2.14).
Искомая величина DТI зависит только от конфигурации кривой и не зависит от Тн.
 ; (2.47)
; (2.47)
 . (2.48)
. (2.48)
Порядок решения по методу проф. Н.И. Мерцалова:
1. Приведение сил и моментов и построение диаграмм суммарного приведенного момента Мnc (j).
2. После интегрирования вычисляется работа
 . (2.49)
. (2.49)
3. Приведение масс и определение  и .
и .
4. Построение диаграммы  без численного выявления положения сдвинутой оси абсцисс.
без численного выявления положения сдвинутой оси абсцисс.
5. Подсчет  .
.
 |
 |
Р и с. 2.14. Метод Мерцалова
Примечания:
Маховик выполняет роль периодического регулятора только на стадии установившегося движения, когда å Ац =0 и wс =const.
Решение приведено для Мnd =const.
Непериодическое регулирование. Колебания скорости входного звена при некоторых условиях выходят за пределы периодического изменения, например, при внезапных скачках или сбросе нагрузки, изменении подводимой энергии, пуске, торможении и т.д.
Основным элементом саморегулирующих систем является обратная связь – устройство, передающее часть выходной координаты на вход объекта регулирования (рис. 2.15).
Регулятор – устройство, измеряющее отклонение регулируемого параметра и вырабатывающее воздействие, величина которого зависит от измеренного отклонения параметра. В качестве примера рассмотрено регулирование угловой скорости электрогенератора (рис. 2.16).  – сумма сил в регуляторе (рис. 2.17), где Fи=
– сумма сил в регуляторе (рис. 2.17), где Fи=  – сила инерции от центробежных противовесов;
– сила инерции от центробежных противовесов;  – сила тяжести груза; Fип= f(х) – усилие пружины.
– сила тяжести груза; Fип= f(х) – усилие пружины.
|

Р и с. 2.15. Блок-схема регулирования по замкнутому контуру:
1 – источник энергии; 2 – двигатель – управляемый объект; 3 – потребитель энергии; 4 – регулятор; РО – регулирующий орган; ИО – исполнительный орган; СОС – сигналы обратной связи; СУ – сигналы управления
 | |||||
| |||||
 | |||||
|
|
