 |


Практическая работа № 2. Изучение системы управления пропульсивным комплексом ГД-ВРШ. Судовой дизель 16ЧН 25/30 Вяртсиля
|
|
|
|
Практическая работа № 2
Изучение системы управления пропульсивным комплексом ГД-ВРШ
(MAIN ENGINE CONTROL)
Цель работы: ознакомление с составом системы управления пропульсивным комплексом ГД-ВРШ. Изучить основные элементы системы, приборы, индикаторы и панель управления.
Общие положения
Судовой дизель 16ЧН 25/30 Вяртсиля
Поперечный разрез судового дизеля представлен на рис. 7. Дизель V-образный, с газотурбинным наддувом изготовлен по лицензии фирмы MAN B& W.
Основные характеристики:
- цилиндровая мощность 200 кВт;
- среднее эффективное давление 18, 7 бар;
- скорость поршня 10, 0 м/с;
- габаритные размеры L*B*H 5, 65*2, 2*2, 9, м.
- масса двигателя 21, 1 т.
- топливо – Marine Diesel Oil.
Остов дизеля – литой чугунный, станина и блок цилиндров выполнены как одно целое. Крышка цилиндров включает по два впускных и два выпускных клапана. Поршень без отъемной головки и без жидкостного охлаждения, шатун без отъемной пятки стержня.
Для устранения крутильных колебаний в системе «двигатель – валопровод – гребной винт» на свободном конце коленчатого вала установлено демпфирующее устройство.
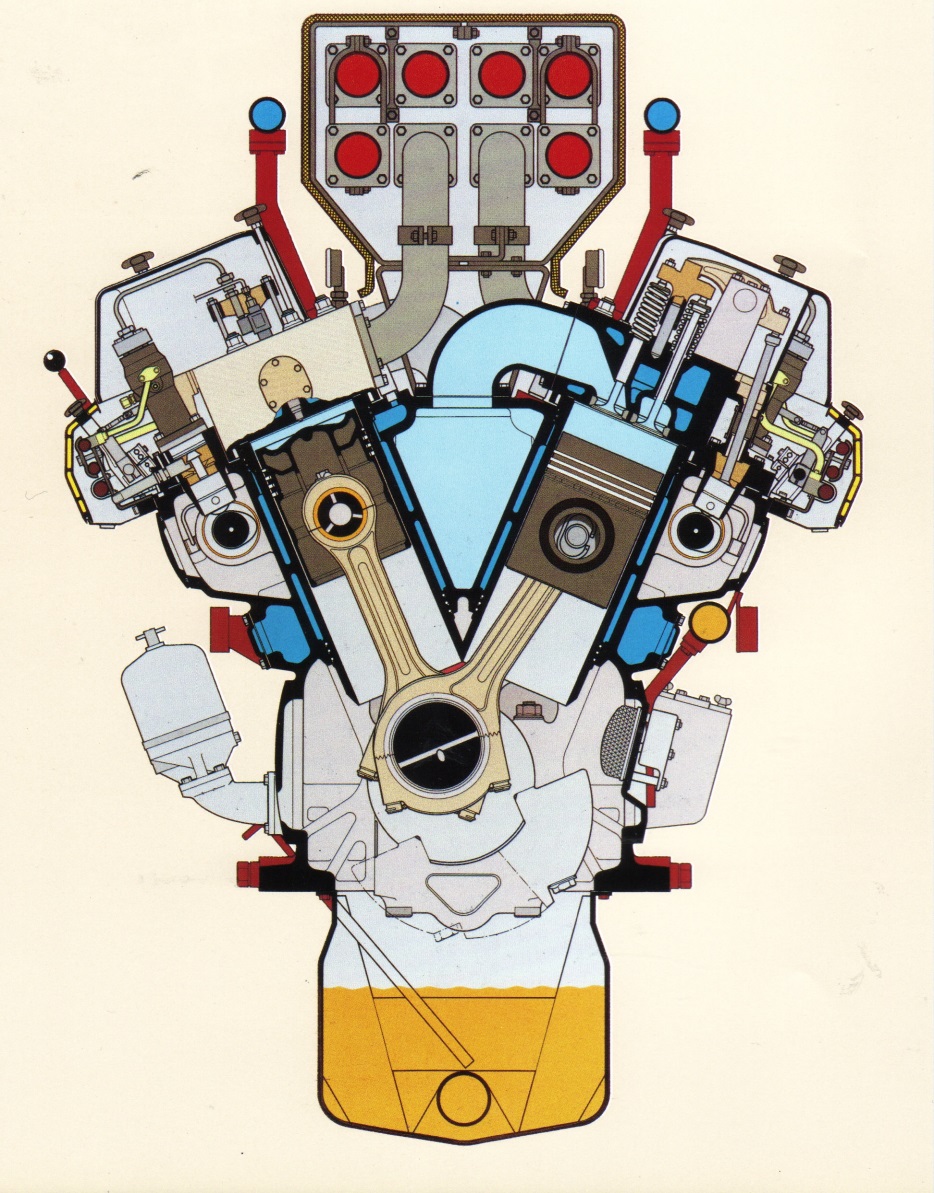
Рис. 7. Поперечный разрез дизеля 16 ЧН 25/30 фирмы Вяртсиля
Редуктор с муфтами сцепления
На рис. 8 показана сборка редуктора фирмы Валмет со снятым верхним кожухом.
Редуктор с пластинчатыми муфтами сцепления предназначен для передачи мощности на гребной вал от двух дизелей. Максимально допустимая мощность на выходном валу редуктора 6000 кВт при частоте вращения 250 об/мин. Опорные подшипники передачи – тонкостенные стальные, разъемные, залитые баббитом.
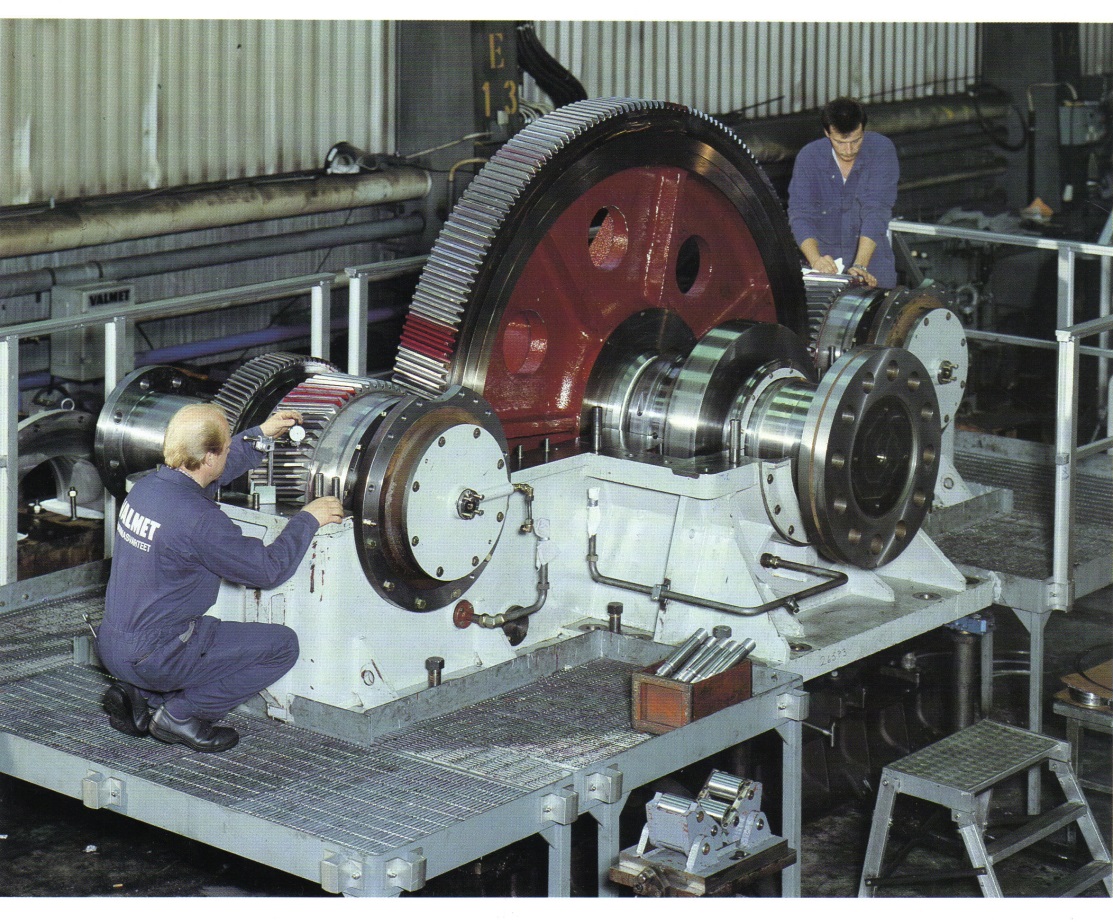
Рис. 8. Редуктор фирмы Валмет
Упорный подшипник выводного вала сегментного типа. Упорное кольцо представляет одно целое с валом. Все сегменты упорного подшипника взаимозаменяемые, с шарнирной опорой в центре.
|
|
|
Схема управления ГСЭУ
Возможность дополнительного изменения нагрузки дизелей за счет воздействия на шаг винта значительно расширяет область эксплуатационных режимов, улучшает использование мощности и маневровые качества судна, компенсирует влияние внешних факторов на характеристику винта и исключает режимы работы в области «тяжелого» винта. При работе на ВРШ условия для перегрузки дизелей становятся более вероятными, чем при работе на ВФШ. Эти обстоятельства выдвигают специфические требования к системе управления, защиты и к назначению режимов.
Наиболее полно этим требованиям удовлетворяет система автоматизированного программного изменения шага и частоты вращения, представленная на рис. 9.

Рис. 9. Функциональная схема управления ГСЭУ
1 – ВРШ; 2 – маслораспределительная коробка МИШ; 3 – датчик шага винта; 4 - регулирующий клапан МИШ; 5 – ПУ в ЦПУ (комбинаторное или раздельное управление шагом); 6 – ПУ на мостике (комбинаторное управление шагом); 7 – ПУ (ручная точна регулировка шага винта); 8 – комбинатор; 9 – блок управления шагом; 10 – регулятор нагрузки; 11 – электропневмопреобразователь; 12- блок распределения нагрузки; 13, 14 – ВРЧВ и датчики топливоподачи (положение рейки ТНВД); 15 – датчики частоты вращения.
Сигнал задания xзд из ПУ 5 или ПУ 6 поступает в комбинатор 8, где он разделяется и направляется в два канала: х1 для регулирования частоты вращения вала ГД и х2 – для регулирования шага винта. Задающий сигнал по шагу винта х2 сравнивается в блоке управления шагом 9 с сигналом х5 фактического значения шага от датчика шага (ДШ) 3. Результирующий сигнал х3=х2 – х1 поступает в электрогидравлический исполнительный механизм изменения шага гребного винта 4, установленный на масло распределительной коробке 2, которая с помощью МИШ, разворачивает лопасти винта в направлении, ликвидирующем сигнал. Задающий сигнал по частоте вращения х1 воздействует на ЭПП 11, откуда пневматический сигнал, поступает на ВРЧВ 13 ГД. правого борта (ПБ), являющийся ведущим дизелем №1. Сигнал на ВРЧВ 14 ГД левого борта (ЛБ) поступает от ЭПП 11. через блок распределения нагрузки 12, где он несколько корректируется сигналом от регулятора нагрузки. Входными сигналами регулятора нагрузки являются сигналы х6 от датчиков частоты вращения (ДЧВ) 15 и сигналы х7 и х8 от датчиков положения реек ТНВД . 13 и 14, определяющих нагрузку дизеля ГД ПБ и ГД ЛБ. Если значения х7 и х8 не равны, появляется сигнал х4, воздействующий на ВРЧВ ГД ЛБ, тем самым выравнивается нагрузка. Если частота вращения (сигнал х6) и нагрузка ГД (сигналы х7 = х8) не соответствуют установленной кривой нагрузки (рис. 11), появляются сигналы х9 и х3 воздействующие на МИШ гребного винта, приводя нагрузку в требуемое соответствие. В регуляторе нагрузки запрограммированы три различные зависимости h т= f (n), аналогичные кривым, которые характеризуют работу на одном ГД, режим работы на двух ГД и при тяжелых условиях плавания (ход во льдах). Для обеспечения непрерывной подачи информации на мостик и в ЦПУ о шаге винта предусмотрена отдельная система указания шага винта. С ее помощью можно осуществлять аварийное управление шагом гребного винта в случае неисправности главной системы управления. В таком случае управление шагом винта проводится с мостика вручную при помощи кнопок «вперед» и «назад», которые воздействуют непосредственно на регулирующие клапаны на маслораспределительной коробке.
|
|
|
|
|
|
