 |


Принцип кэширования данных
|
|
|
|
ЛЕКЦИЯ № 5
«УПРАВЛЕНИЕ ПАМЯТЬЮ»
УЧЕБНЫЕ ВОПРОСЫ:
1. Функции ОС по управлению памятью. Типы адресов.
2. Методы распределения памяти без использования дискового пространства.
3. Кэширование данных.
УЧЕБНАЯ ЛИТЕРАТУРА:
Основная. 1. Олифер В.Г., Олифер Н.А. Сетевые операционные системы/Электр. версия. – Гл. 2. Управление локальными ресурсами, 2.2. Управление памятью.
ВВЕДЕНИЕ
Под памятью (memory) подразумеваем оперативную память (ОП), которой в отличие от внешней памяти (жесткого диска) для сохранения информации требуется постоянное электропитание. Память является важнейшим ресурсом, требующим тщательного управления со стороны мультипрограммной операционной системы.
Особая роль памяти объясняется тем, что процессор может выполнять инструкции программы только в том случае, если они находятся в памяти. Память распределяется как между модулями прикладных программ, так и между модулями самой ОС. Распределению подлежит вся оперативная память, не занятая операционной системой. Обычно ОС располагается в самых младших адресах, однако может занимать и самые старшие адреса.
В ранних ОС управление памятью сводилось просто к загрузке программы и ее данных из некоторого внешнего накопителя (ПЛ, МЛ или МД) в память. С появлением мультипрограммирования перед ОС были поставлены новые задачи, связанные с распределением имеющейся памяти между несколькими одновременно выполняющимися программами.
Рассмотрим основные из известных и наиболее широко применяющихся механизмов управления памятью.
1. ФУНКЦИИ ОС ПО УПРАВЛЕНИЮ ПАМЯТЬЮ. ТИПЫ АДРЕСОВ.
Функциями ОС по управлению памятью в мультипрограммной системе являются:
|
|
|
· отслеживание свободной и занятой памяти,
· выделение памяти процессам и освобождение памяти при завершении процессов,
· вытеснение кодов и данных процессов из оперативной памяти на диск (полное или частичное), когда размеры основной памяти не достаточны для размещения в ней всех процессов, и возвращение их в оперативную память, когда в ней освобождается место,
· настройка адресов программы на конкретную область физической памяти.
Помимо первоначального выделения памяти процессам при их создании ОС должна также заниматься динамическим распределением памяти, т.е. выполнять запросы приложений на выделение им дополнительной памяти во время выполнения. После того как приложение перестает нуждаться в дополнительной памяти, оно может возвратить ее системе. Выделение памяти случайной длины в случайные моменты времени из общего пула памяти приводит к фрагментации и, вследствие этого, к неэффективному ее использованию. Поэтому дефрагментация памяти тоже является функцией ОС.
Во время работы ОС ей часто приходится создавать новые служебные информационные структуры, такие, как описатели процессов и потоков, различные таблицы распределения ресурсов, буферы, используемые процессами для обмена данными, синхронизирующие объекты и т.п. Все эти системные объекты требуют памяти. В некоторых ОС заранее (во время их установки) резервируется некоторый фиксированный объем памяти для системных нужд. В других же ОС используется более гибкий подход, при котором память для системных целей выделяется динамически. В таком случае разные подсистемы ОС при создании своих таблиц, объектов, структур и т.п. обращаются к подсистеме управления памятью с запросами.
Защита памяти – это еще одна важная задача ОС, которая состоит в том, чтобы не позволить выполняемому процессу записывать или читать данные из области памяти, выделенной другому процессу. Эта функция ОС, как правило, реализуется программными модулями ОС в тесном взаимодействии с аппаратными средствами.
|
|
|
Типы адресов
Для идентификации переменных и команд используются символьные имена (метки), виртуальные адреса и физические адреса (рисунок 2.7).
· Символьные имена присваивает пользователь при написании программы на алгоритмическом языке или ассемблере.
· Виртуальные адреса вырабатывает транслятор, переводящий программу на машинный язык. Так как во время трансляции в общем случае не известно, в какое место оперативной памяти будет загружена программа, то транслятор присваивает переменным и командам виртуальные (условные) адреса, обычно считая по умолчанию, что программа будет размещена, начиная с нулевого адреса.
· Физические адреса соответствуют номерам ячеек оперативной памяти, где в действительности расположены или будут расположены переменные и команды. Переход от виртуальных адресов к физическим может осуществляться двумя способами.
Совокупность виртуальных адресов процесса называется виртуальным адресным пространством. Каждый процесс имеет собственное виртуальное адресное пространство, но диапазон возможных адресов виртуального пространства у всех процессов является одним и тем же. Тем не менее каждый процесс имеет собственное виртуальное адресное пространство – транслятор присваивает виртуальные адреса переменным и кодам каждой программе независимо. Совпадение виртуальных адресов переменных и команд различных процессов не приводит к конфликтам, так как в том случае, когда эти переменные одновременно присутствуют в ОП, ОС отображает их на разные физические адреса.
Максимальный размер виртуального адресного пространства ограничивается разрядностью адреса, присущей данной архитектуре компьютера, и, как правило, не совпадает с объемом физической памяти, имеющимся в компьютере.
В разных ОС используются разные способы структуризации виртуального адресного пространства (ВАП). В одних ОС ВАП процесса подобно физической памяти представлено в виде непрерывной линейной последовательности виртуальных адресов. При этом виртуальным адресом является единственное число, представляющее собой смещение относительно начала ВАП. Адрес такого типа называют линейным виртуальным адресом.
|
|
|
В других ОС ВАП делится на части, называемые сегментами (секциями, областями и т.п.). В этом случае помимо линейного адреса может быть использован виртуальный адрес, представляющий собой пару чисел (n, m), где n определяет сегмент, а m – смещение внутри сегмента.
Существуют и более сложные способы структуризации ВАП, когда виртуальный адрес образуется тремя или даже более числами.
Задачей ОС является отображение индивидуальных ВАП всех одновременно выполняющихся процессов на общую физическую память. При этом ОС отображает либо все ВАП, либо только его определенную часть. Процедура преобразования виртуальных адресов в физические должна быть максимально прозрачна для пользователя и программиста.
Существуют два принципиально отличающихся подхода к преобразованию виртуальных адресов в физические.

Рис. 2.7. Типы адресов
В первом случае замену виртуальных адресов на физические делает специальная системная программа - перемещающий загрузчик. Перемещающий загрузчик на основании имеющихся у него исходных данных о начальном адресе физической памяти, в которую предстоит загружать программу, и информации, предоставленной транслятором об адресно-зависимых константах программы, выполняет загрузку программы, совмещая ее с заменой виртуальных адресов физическими.
Второй способ заключается в том, что программа загружается в память в неизмененном виде в виртуальных адресах, при этом операционная система фиксирует смещение действительного расположения программного кода относительно виртуального адресного пространства. Во время выполнения программы при каждом обращении к оперативной памяти выполняется преобразование виртуального адреса в физический. Второй способ является более гибким, он допускает перемещение программы во время ее выполнения, в то время как перемещающий загрузчик жестко привязывает программу к первоначально выделенному ей участку памяти. Вместе с тем использование перемещающего загрузчика уменьшает накладные расходы, так как преобразование каждого виртуального адреса происходит только один раз во время загрузки, а во втором случае - каждый раз при обращении по данному адресу.
|
|
|
В некоторых случаях (обычно в специализированных системах), когда заранее точно известно, в какой области оперативной памяти будет выполняться программа, транслятор выдает исполняемый код сразу в физических адресах.
2. Методы распределения памяти без использования дискового пространства
 | |
| |
 |
 |
 | ||
 |
Рис. 2.8. Классификация методов распределения памяти
Все методы управления памятью могут быть разделены на два класса: методы, которые используют перемещение процессов между оперативной памятью и диском, и методы, которые не делают этого (рисунок 2.8). Начнем с последнего, более простого класса методов.
2.1. Распределение памяти фиксированными разделами
Самым простым способом управления оперативной памятью является разделение ее на несколько разделов фиксированной величины. Это может быть выполнено вручную оператором во время старта системы или во время ее генерации. Очередная задача, поступившая на выполнение, помещается либо в общую очередь (рисунок 2.9,а), либо в очередь к некоторому разделу (рисунок 2.9,б).
Подсистема управления памятью в этом случае выполняет следующие задачи:
· сравнивая размер программы, поступившей на выполнение, и свободных разделов, выбирает подходящий раздел,
·
 |
осуществляет загрузку программы и настройку адресов.
Рис. 2.9. Распределение памяти фиксированными разделами:
а - с общей очередью; б - с отдельными очередями
При очевидном преимуществе - простоте реализации - данный метод имеет существенный недостаток - жесткость. Так как в каждом разделе может выполняться только одна программа, то уровень мультипрограммирования заранее ограничен числом разделов не зависимо от того, какой размер имеют программы. Даже если программа имеет небольшой объем, она будет занимать весь раздел, что приводит к неэффективному использованию памяти. С другой стороны, даже если объем оперативной памяти машины позволяет выполнить некоторую программу, разбиение памяти на разделы не позволяет сделать этого.
2.2. Распределение памяти разделами переменной величины
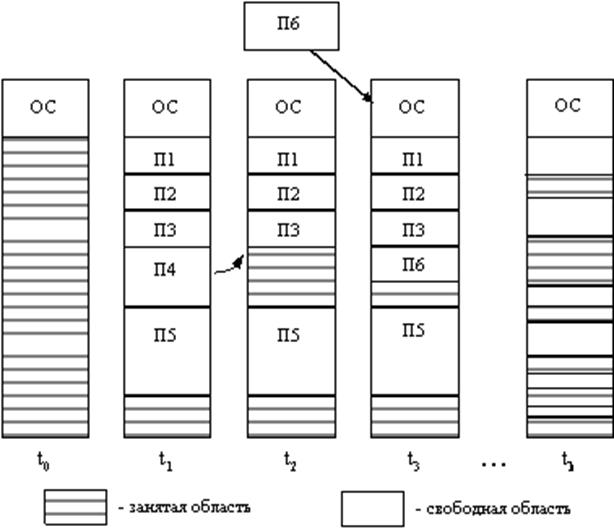
В этом случае память машины не делится заранее на разделы. Сначала вся память свободна. Каждой вновь поступающей задаче выделяется необходимая ей память. Если достаточный объем памяти отсутствует, то задача не принимается на выполнение и стоит в очереди. После завершения задачи память освобождается, и на это место может быть загружена другая задача. Таким образом, в произвольный момент времени оперативная память представляет собой случайную последовательность занятых и свободных участков (разделов) произвольного размера.
|
|
|
На рисунке 2.10 показано состояние памяти в различные моменты времени при использовании динамического распределения. Так в момент t0 в памяти находится только ОС, а к моменту t1 память разделена между 5 задачами, причем задача П4, завершаясь, покидает память. На освободившееся после задачи П4 место загружается задача П6, поступившая в момент t3.
Задачами операционной системы при реализации данного метода управления памятью являются:
· ведение таблиц свободных и занятых областей, в которых указываются начальные адреса и размеры участков памяти,
· при поступлении новой задачи - анализ запроса, просмотр таблицы свободных областей и выбор раздела, размер которого достаточен для размещения поступившей задачи,
· загрузка задачи в выделенный ей раздел и корректировка таблиц свободных и занятых областей,
· после завершения задачи корректировка таблиц свободных и занятых областей.
Программный код не перемещается во время выполнения, то есть может быть проведена единовременная настройка адресов посредством использования перемещающего загрузчика. Выбор раздела для вновь поступившей задачи может осуществляться по разным правилам, таким, например, как "первый попавшийся раздел достаточного размера", или "раздел, имеющий наименьший достаточный размер", или "раздел, имеющий наибольший достаточный размер". Все эти правила имеют свои преимущества и недостатки.
 |
Выбор раздела для вновь поступившей задачи может осуществляться по разным правилам, таким, например, как "первый попавшийся раздел достаточного размера", или "раздел, имеющий наименьший достаточный размер", или "раздел, имеющий наибольший достаточный размер". Все эти правила имеют свои преимущества и недостатки.
Рис. 2.10. Распределение памяти динамическими разделами
По сравнению с методом распределения памяти фиксированными разделами данный метод обладает гораздо большей гибкостью, но ему присущ очень серьезный недостаток - фрагментация памяти. Фрагментация - это наличие большого числа несмежных участков свободной памяти очень маленького размера (фрагментов). Настолько маленького, что ни одна из вновь поступающих программ не может поместиться ни в одном из участков, хотя суммарный объем фрагментов может составить значительную величину, намного превышающую требуемый объем памяти.
2.3. Перемещаемые разделы
 |
Одним из методов борьбы с фрагментацией является перемещение всех занятых участков в сторону старших либо в сторону младших адресов, так, чтобы вся свободная память образовывала единую свободную область (рисунок 2.11). В дополнение к функциям, которые выполняет ОС при распределении памяти переменными разделами, в данном случае она должна еще время от времени копировать содержимое разделов из одного места памяти в другое, корректируя таблицы свободных и занятых областей. Эта процедура называется "сжатием".
Рис. 2.11. Распределение памяти перемещаемыми разделами
Сжатие может выполняться либо при каждом завершении задачи, либо только тогда, когда для вновь поступившей задачи нет свободного раздела достаточного размера. В первом случае требуется меньше вычислительной работы при корректировке таблиц, а во втором - реже выполняется процедура сжатия. Так как программы перемещаются по оперативной памяти в ходе своего выполнения, то преобразование адресов из виртуальной формы в физическую должно выполняться динамическим способом.
Хотя процедура сжатия и приводит к более эффективному использованию памяти, она может потребовать значительного времени, что часто перевешивает преимущества данного метода.
Принцип кэширования данных
Память вычислительной машины представляет собой иерархию запоминающих устройств (внутренние регистры процессора, различные типы сверхоперативной и оперативной памяти, диски, ленты), отличающихся средним временем доступа и стоимостью хранения данных в расчете на один бит (рисунок 2.17). Пользователю хотелось бы иметь и недорогую и быструю память. Кэш-память представляет некоторое компромиссное решение этой проблемы.
 |
Рис. 2.17. Иерархия ЗУ
Кэш-память - это способ организации совместного функционирования двух типов запоминающих устройств, отличающихся временем доступа и стоимостью хранения данных, который позволяет уменьшить среднее время доступа к данным за счет динамического копирования в "быстрое" ЗУ наиболее часто используемой информации из "медленного" ЗУ.
Кэш-памятью часто называют не только способ организации работы двух типов запоминающих устройств, но и одно из устройств - "быстрое" ЗУ. Оно стоит дороже и, как правило, имеет сравнительно небольшой объем. Важно, что механизм кэш-памяти является прозрачным для пользователя, который не должен сообщать никакой информации об интенсивности использования данных и не должен никак участвовать в перемещении данных из ЗУ одного типа в ЗУ другого типа, все это делается автоматически системными средствами.
Рассмотрим частный случай использования кэш-памяти для уменьшения среднего времени доступа к данным, хранящимся в оперативной памяти. Для этого между процессором и оперативной памятью помещается быстрое ЗУ, называемое просто кэш-памятью (рисунок 2.18). В качестве такового может быть использована, например, ассоциативная память. Содержимое кэш-памяти представляет собой совокупность записей обо всех загруженных в нее элементах данных. Каждая запись об элементе данных включает в себя адрес, который этот элемент данных имеет в оперативной памяти, и управляющую информацию: признак модификации и признак обращения к данным за некоторый последний период времени.
В системах, оснащенных кэш-памятью, каждый запрос к оперативной памяти выполняется в соответствии со следующим алгоритмом:
 |
Рис. 2.18. Кэш-память
1. Просматривается содержимое кэш-памяти с целью определения, не находятся ли нужные данные в кэш-памяти; кэш-память не является адресуемой, поэтому поиск нужных данных осуществляется по содержимому - значению поля "адрес в оперативной памяти", взятому из запроса.
2. Если данные обнаруживаются в кэш-памяти, то они считываются из нее, и результат передается в процессор.
3. Если нужных данных нет, то они вместе со своим адресом копируются из оперативной памяти в кэш-память, и результат выполнения запроса передается в процессор. При копировании данных может оказаться, что в кэш-памяти нет свободного места, тогда выбираются данные, к которым в последний период было меньше всего обращений, для вытеснения из кэш-памяти. Если вытесняемые данные были модифицированы за время нахождения в кэш-памяти, то они переписываются в оперативную память. Если же эти данные не были модифицированы, то их место в кэш-памяти объявляется свободным.
На практике в кэш-память считывается не один элемент данных, к которому произошло обращение, а целый блок данных, это увеличивает вероятность так называемого "попадания в кэш", то есть нахождения нужных данных в кэш-памяти.
Покажем, как среднее время доступа к данным зависит от вероятности попадания в кэш. Пусть имеется основное запоминающие устройство со средним временем доступа к данным t1 и кэш-память, имеющая время доступа t2, очевидно, что t2<t1. Обозначим через t среднее время доступа к данным в системе с кэш-памятью, а через p - вероятность попадания в кэш. По формуле полной вероятности имеем:
t = t1(1 - p) + t2p =(t2 - t1)р + t1
Из нее видно, что среднее время доступа к данным в системе с кэш-памятью линейно зависит от вероятности попадания в кэш и изменяется от среднего времени доступа в основное ЗУ (при р=0) до среднего времени доступа непосредственно в кэш-память (при р=1).
В реальных системах вероятность попадания в кэш составляет примерно 0,9. Высокое значение вероятности нахождения данных в кэш-памяти связано с наличием у данных объективных свойств: пространственной и временной локальности.
Пространственная локальность. Если произошло обращение по некоторому адресу, то с высокой степенью вероятности в ближайшее время произойдет обращение к соседним адресам.
Временная локальность. Если произошло обращение по некоторому адресу, то следующее обращение по этому же адресу с большой вероятностью произойдет в ближайшее время.
Все предыдущие рассуждения справедливы и для других пар запоминающих устройств, например, для оперативной памяти и внешней памяти. В этом случае уменьшается среднее время доступа к данным, расположенным на диске, и роль кэш-памяти выполняет буфер в оперативной памяти.
<basefont size=3>
ЗАКЛЮЧЕНИЕ
1. ОП является важнейшим ресурсом ВС, требующим тщательного управления со стороны мультипрограммной ОС. Особая роль памяти объясняется тем, что процессор может выполнять инструкции программы только в том случае, если они находятся в ОП.
2. ОП распределяется как между модулями прикладных программ, так и между модулями самой ОС.
3. Функциями ОС по управлению памятью в мультипрограммной ОС являются:
· отслеживание наличия свободной и занятой памяти,
· выделение памяти процессам и освобождение памяти при завершении процессов,
· вытеснение кодов и данных процессов из оперативной памяти на диск (полное или частичное), когда размеры основной памяти не достаточны для размещения в ней всех процессов, и возвращение их в оперативную память, когда в ней освобождается место,
· настройка адресов программы на конкретную область физической памяти;
· защита памяти процессов от взаимного вмешательства.
4. На разных этапах жизненного цикла программы для представления переменных и кодов требуются три типа адресов: символьные (имена, используемые программистом), виртуальные (условные числа, вырабатываемые компилятором), и физические (адреса фактического размещения в ОП).
|
|
|
