 |


Пропорционально-интегрально-дифференциальный закон регулирования
|
|
|
|
ПИД-закон регулирования включает в себя три вида управляющих воздействий: пропорциональное, интегральное, дифференциальное:
Параметрами настройки ПИД-регулятора являются:  — коэффициент усиления;
— коэффициент усиления;  — время изодрома;
— время изодрома;  — время предварения. Вполне очевидно, что ПИД-закон регулирования является наиболее совершенным по сравнению с другими законами регулирования. Если время изодрома увеличить до бесконечности
— время предварения. Вполне очевидно, что ПИД-закон регулирования является наиболее совершенным по сравнению с другими законами регулирования. Если время изодрома увеличить до бесконечности  , а время предварения уменьшить до нуля
, а время предварения уменьшить до нуля  , то действие ПИД-регулятора будет аналогично действию П-регулятора (ПИД-регулятор при
, то действие ПИД-регулятора будет аналогично действию П-регулятора (ПИД-регулятор при  аналогичен ПИ-регулятору, а при
аналогичен ПИ-регулятору, а при  аналогичен ПД-регулятору).
аналогичен ПД-регулятору).
Позиционные регуляторы
По сравнению с линейными алгоритмами (линейными законами регулирования) нелинейные алгоритмы распространены в меньшей степени.
Из нелинейных алгоритмов регулирования наиболее употребительны алгоритмы с релейной статической характеристикой: двухпозиционный и трехпозиционный. Такие регуляторы можно отнести к группе регуляторов дискретного действия.
Двухпозиционные регуляторы
Выходная величина двухпозиционного регулятора может принимать только два значения: минимальное или максимальное.
Область применения двухпозиционного регулятора: для регулирования технологических параметров в инерционных объектах с большой емкостью и малым запаздыванием, когда не требуется особой точности; для сигнализации о выходе контролируемой величины за заданные границы.
Трехпозиционные регуляторы
У трехпозиционных регуляторов помимо двух крайних положений (открыто и закрыто) регулирующий орган имеет еще одно — промежуточное (среднее) положение, что способствует более плавному изменению регулируемой величины и сокращению числа срабатываний регулирующего органа в единицу времени.
|
|
|
Преимущество трехпозиционного регулирования перед двухпозиционным: возможность прекращения автоколебательного процесса и достижение равновесного состояния, если регулируемая величина находится в пределах зоны нечувствительности,
Лекция 8
Регулируемые параметры.
Регулирование основных технологических параметров
Основные технологические параметры, характеризующие химико-технологические процессы — это расход, уровень, давление, температура, рН, а также параметры качества: концентрация готового продукта и его физико-химические свойства (плотность, вязкость, влажность и др.).
Регулирование расхода
При регулировании расхода нужно учитывать некоторые особенности, не присущие обычно системам регулирования других технологических параметров.
Первая особенность — небольшая (обычно пренебрежимо малая) инерционность объекта регулирования, который представляет собой, как правило, участок трубопровода между первичным измерительным преобразователем для измерения расхода и регулирующим органом. После перемещения штока регулирующего органа в новое положение новое значение расхода устанавливается за доли секунды или, в крайнем случае, за несколько секунд. Это означает, что динамические характеристики системы определяются главным образом инерционностью измерительного устройства, регулятора, исполнительного устройства и линией передачи сигнала (импульсных линий).
Вторая особенность проявляется в том, что сигнал, соответствующий измеренному значению расхода, всегда содержит помехи, уровень которых высок. Частично шум представляет собой физические колебания расхода, частота которых настолько велика, что система не успевает на них реагировать. Наличие высокочастотных составляющих в сигнале изменения расхода — результат пульсаций давления в трубопроводе, которые в свою очередь являются следствием работы насосов, компрессоров, случайных колебаний расхода, например, при дросселировании потока через сужающее устройство. Поэтому при наличии шума, чтобы избежать усиления в системе случайных возмущений, следует применять малые значения коэффициента усиления регулятора.
|
|
|
Рассмотрим объект регулирования расхода — участок трубопровода 1, расположенный между местом измерения расхода (местом установки первичного измерительного преобразователя, например диафрагмы 2) и регулирующим органом 3 (рис. 1). Длина прямого участка трубопровода определяется правилами установки нормальных сужающих устройств и регулирующих органов и может составить несколько метров. Динамику объекта (трубопровода) — канала расход вещества через регулирующий клапан—расход вещества через расходомер — можно представить статическим
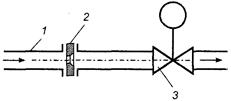
Рис. 1. Фрагмент системы регулирования расхода.
звеном первого порядка с транспортным запаздыванием. Значение постоянной времени  составляет несколько секунд; время транспортного запаздывания
составляет несколько секунд; время транспортного запаздывания  для газа — доли секунды, для жидкости — несколько секунд.
для газа — доли секунды, для жидкости — несколько секунд.
Поскольку инерционность объекта при регулировании расхода незначительна, к выбору технических средств управления и методов расчета АСУ предъявляются повышенные требования.
В системах регулирования расхода применяют различные способы изменения расхода:
• дросселирование потока вещества через регулирующий орган (клапан, заслонка, шибер и др.), установленный на трубопроводе;
• изменение угловой скорости вращения рабочего вала насоса или вентилятора;
• байпасирование потока (под байпасированием понимается переброс части вещества из основной магистрали в обводную линию).
|
|
|
