 |


ШИР, ШИМ, ПИД-регулирование. Учебные вопросы
|
|
|
|
|
ШИР, ШИМ, ПИД-регулирование | |
|
Учебные вопросы | |
| 1 Широтно – импульсное регулирование (ШИР) | |
| 2 Широтно – импульсная модуляция (ШИМ) | |
| 3 ПИД-регулирование | |
| 3. 1 Классификация автоматических регуляторов | 3. 2 Законы регулирования |
| 3. 3 Временная характеристика регуляторов непрерывного типа | 3. 4 Сравнительная характеристика типов регуляторов и области их применения |
| Вопросы для самопроверки | |
| Цель лекции –получить представление о способах регулирования параметров. | |
1 Широтно – импульсное регулирование (ШИР) [1]
Для регулирования среднего значения напряжения (тока), а значит и мощности, подаваемой на нагрузку, применяются современные способы регулировки: широтно-импульсное регулирование (ШИР) и способ широтно-импульсной модуляции (ШИМ). Переход на импульсные способы регулирования стал возможен с развитием технологии промышленного изготовления полевых MOSFET транзисторов и биполярных IGBT транзисторов с изолированным затвором, что позволило уменьшить габариты и вес и повысить коэффициент полезного действия современной электротехнической и электронной техники (отсутствие силовых трансформаторов).
Принцип импульсного регулирования
 Основными элементами любого типа импульсного регулятора мощности являются полупроводниковые ключи – транзисторы или тиристоры. В простейшем виде схема импульсного источника питания имеет вид, изображенный на рисунке 1. 1. Ключ переключается с определенной частотой и
Основными элементами любого типа импульсного регулятора мощности являются полупроводниковые ключи – транзисторы или тиристоры. В простейшем виде схема импульсного источника питания имеет вид, изображенный на рисунке 1. 1. Ключ переключается с определенной частотой и
Рисунок 1. 1
остается во включенном состоянии определенную длительность времени.
Чтобы понять принцип импульсного регулирования воспользуемся примером, изображенным на рисунке 1. 2 (слева). Разобьем ось времени на равные промежутки, называемые периодом T. Теперь, например, половину периода мы будем замыкать ключ. Когда ключ (транзистор) замкнут, к нагрузке подается напряжение от источника питания. Вторую часть полупериода ключа находится в закрытом (разомкнутом) состоянии. А потребитель останется без питания.
|
|
|
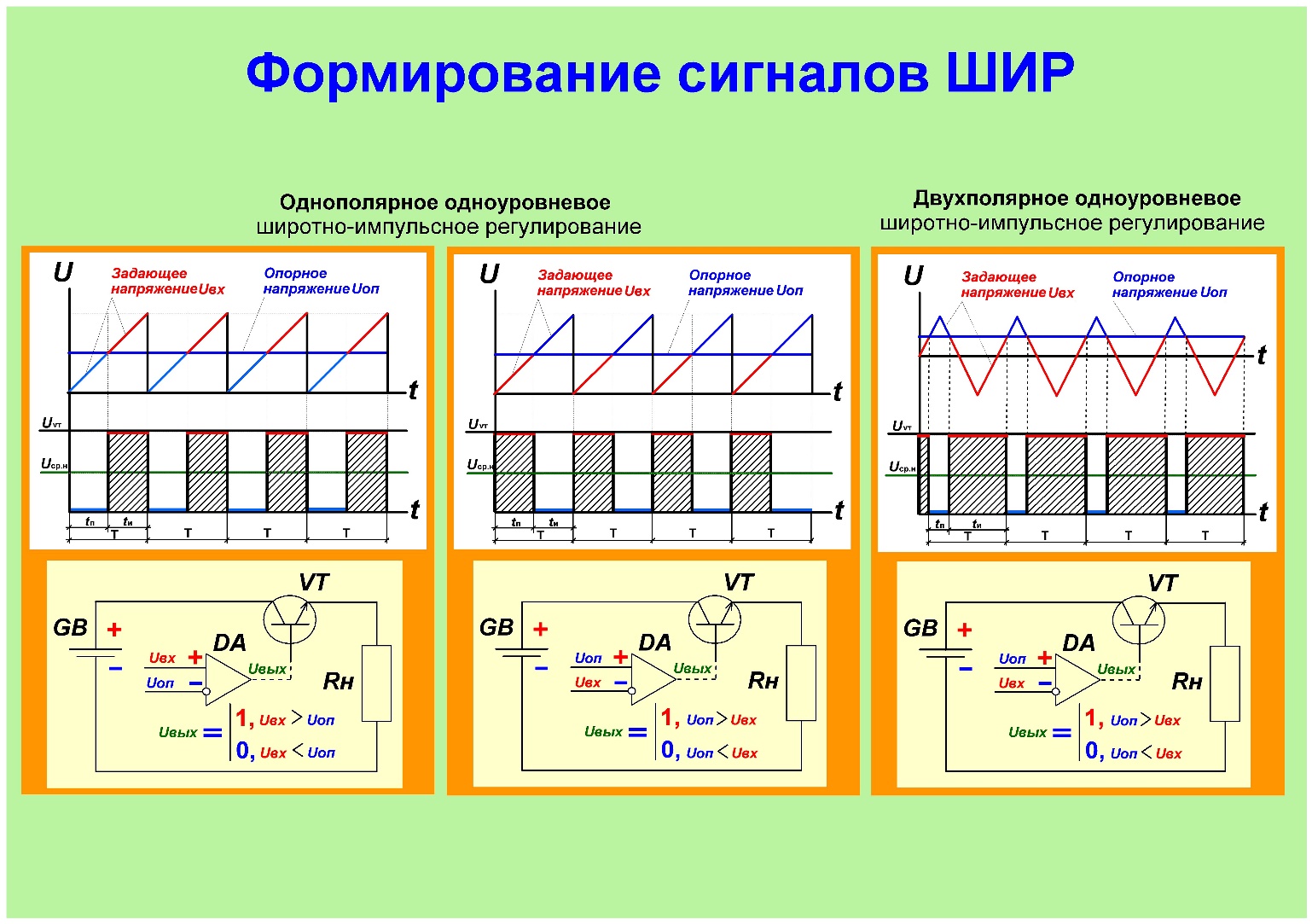
Рисунок 1. 2
Время, в течение которого ключ замкнут, называется временем импульса tи. А время длительности разомкнутого ключа называют временем паузы tп.
Среднее значение напряжения на нагрузке можно выразить следующей зависимостью: Uср. н = Uип ·tи/T.
Отношение времени импульса tи к периоду T (D=tи/T) называют коэффициентом заполнения D. А величина, обратная ему называется скважностью: S = 1/D = T/tи.
На практике удобнее пользоваться коэффициентом заполнения, который зачастую выражают в процентах. Когда транзистор (ключ) полностью открыт на протяжении всего времени, то коэффициент заполнения D равен единице или 100 %.
Если D = 50 %, то это означает, что половину времени за период транзистор находится в открытом состоянии, а половину в закрытом. В таком случае форма
сигнала называется меандр. Следовательно, изменяя коэффициент D от 0 до единицы или до 100 % можно изменять величину Uср. н от 0 до Uип:
Uср. н = Uип∙ D.
А соответственно регулировать и величину подводимой мощности:
Pср. н = Pип∙ D.
Принцип широтно-импульсного регулирования [1]
В западной литературе практически не различают понятия широтно-импульсного регулирования ШИР и широтно-импульсной модуляции ШИМ.
Сейчас во многих микросхемах, особенно применяемых в DC-DC преобразователях, реализован принцип ШИР. Но при этом их называют ШИМ контроллерами. Поэтому теперь различие в названии между этими двумя способами практически отсутствует. Однако у нас различие между ними все же существует.
|
|
|
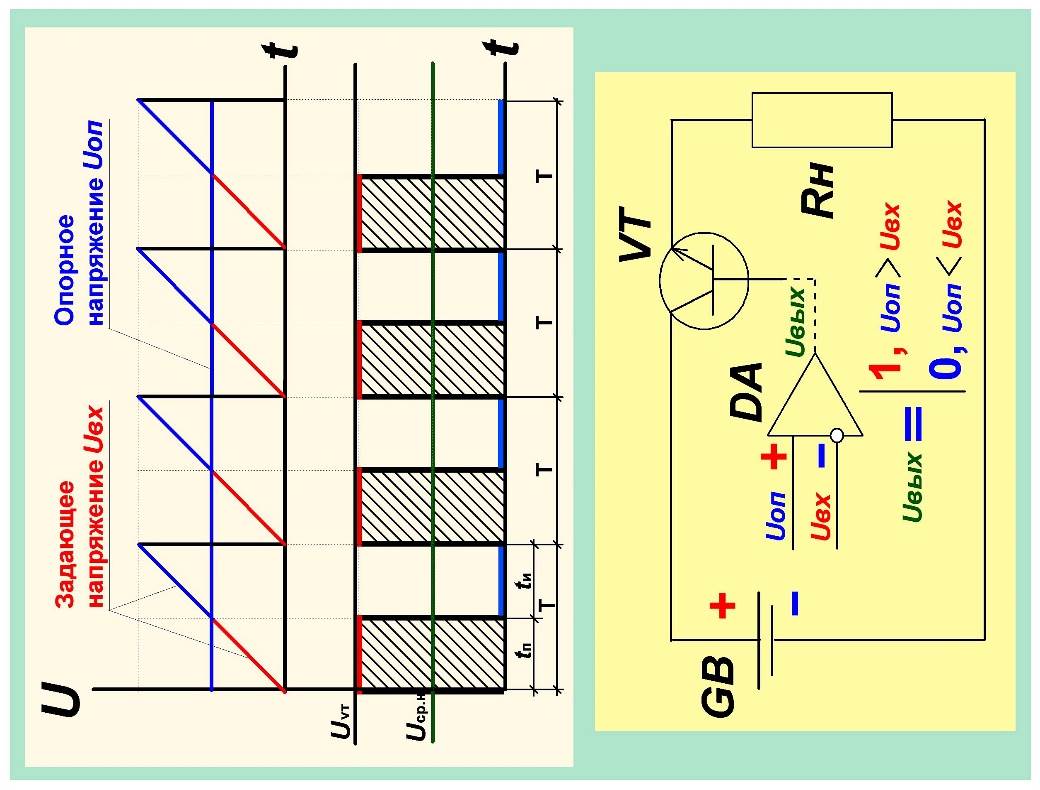
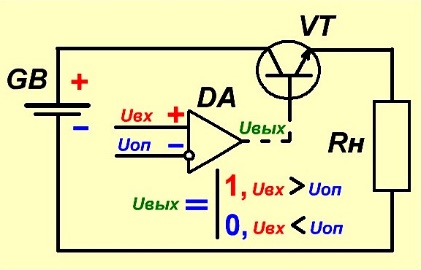 В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного Uоп и задающего Uвх напряжения, а также компаратор DA. Рассмотрим упрощенную схему (рисунок 1. 3), в которой аккумуляторная батарея GB питает потребитель Rн импульсным способом посредством транзистора VT, который управляется компаратором DA. [1]
В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного Uоп и задающего Uвх напряжения, а также компаратор DA. Рассмотрим упрощенную схему (рисунок 1. 3), в которой аккумуляторная батарея GB питает потребитель Rн импульсным способом посредством транзистора VT, который управляется компаратором DA. [1]
Рисунок 1. 3
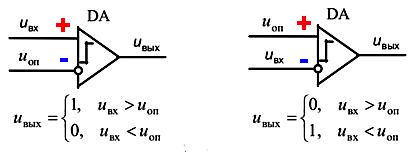
Основой построения ШИР является аналоговый компаратор (рисунок 1. 4). Два входа для подачи аналоговых сигналов носят названия неинвертирующий (+) и инвертирующий (-). Если на неинвертирующем входе напряжение больше, чем на инвертирующем, выходной сигнал равен логической «1», иначе – логическому «0».
 Компаратор позволяет сравнивать значения напряжений, присутствующих на соответствующих входах микроконтроллера.
Компаратор позволяет сравнивать значения напряжений, присутствующих на соответствующих входах микроконтроллера.
Рисунок 1. 4
Обе схемы подключения входных сигналов, изображенные на рисунке 1. 4,
являются равнозначными. Одним из сигналов является пилообразный сигнал.
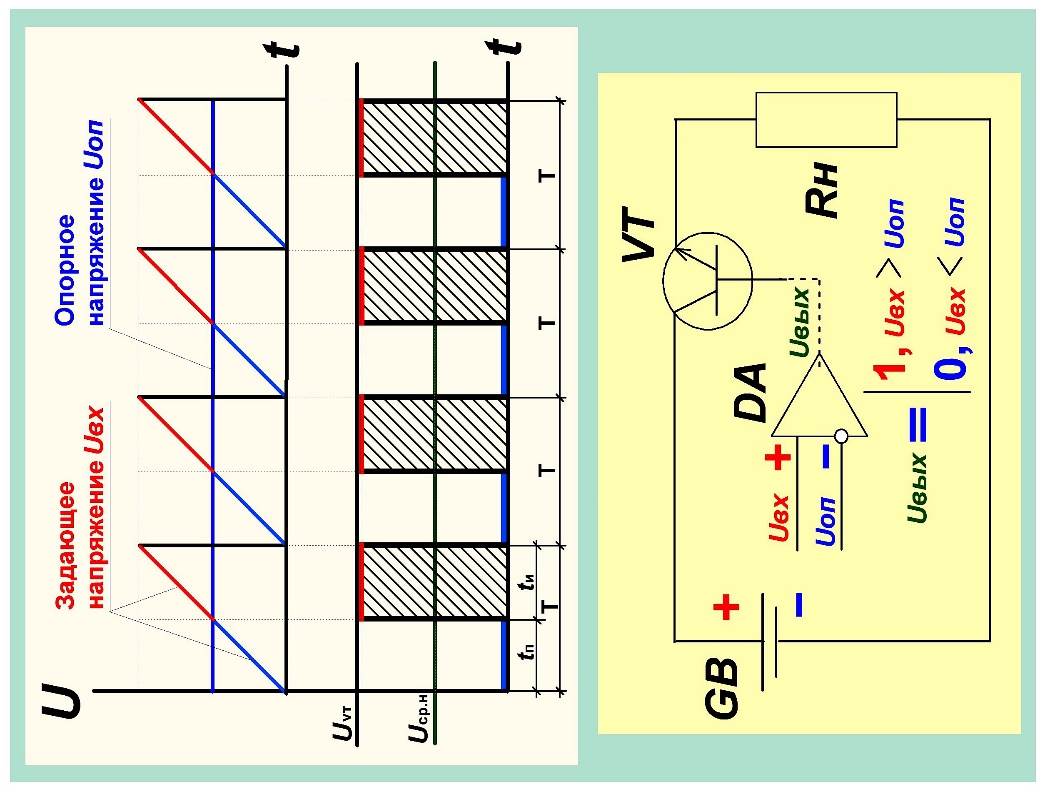
В нашем случае, именно сигнал высокого уровня Uвых> 1 открывает транзистор VT. Рассмотрим, как формируется необходимая длительность времени импульса tи. Для этого воспользуемся графиком, изображенным на рисунке 1. 5 слева.
При ШИР на один из входов компаратора подается сигнал пилообразной формы заданной частоты. Его еще называют задающим. На второй вход подается опорное (постоянное) напряжение, которое сравнивается с задающим. В результате сравнения на выходе компаратора формируется импульс соответствующей длительности.
Если на неинверитирующем входе компаратора опорный сигнал, то сначала будет идти пауза, а затем импульс (рисунок 1. 5 слева). Если на неинвертирующий вход подать задающий сигнал, то сначала будет импульс, затем пауза (рисунок 1. 5 справа).
Таким образом, изменяя значение задаваемого сигнала, можно изменять коэффициент заполнения D, а соответственно и среднее напряжение Uср. н и среднюю мощность Pср. н на нагрузке. [1]
|
|
|
