 |


Потери мощности и КПД машин постоянного тока
|
|
|
|
КПД машины является отношением полезной выходной мощности Р2 к подводимой Р1. Для определения КПД, как правило, применяются косвенные методы, при которых вычисляются потери мощности при нагрузке.
Наиболее просто определяются электрическая мощность на выходе генератора Р2 и мощность, подводимая к двигателю, Р1. Поэтому выражения КПД для генераторов и двигателей обычно отличаются друг от друга:
для генераторов  ; (27)
; (27)
для двигателей  . (28)
. (28)
Определение выходной мощности и порядка учета потерь двигателя с параллельным возбуждением показаны на диаграмме (рис. 17).
Потери в цепи якоря двигателя параллельного возбуждения рм состоит из потерь в сопротивлениях обмотки якоря rя, обмотки добавочных полюсов rд.п, компенсационной rк (при наличии), а также потерь в контакте щетки – коллектор. Сопротивление цепи берется при температуре 750С, падение напряжения в контакте щетки – коллектор ΔU принимается неизменным (1,5…2 В). Исходя из этого,
 . (29)
. (29)
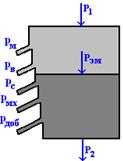
Рисунок 17
Потери в цепи якоря двигателя последовательного возбуждения состоят из потерь в сопротивлениях обмотки якоря rя, добавочных полюсов rд.п, последовательной обмотки rп.о и потерь в контакте щетки – коллектор ΔU:
 . (30)
. (30)
Потери в сопротивлении цепи возбуждения двигателя параллельного возбуждения
 . (31)
. (31)
Вращение сердечника якоря, обусловливает потери мощности в стали рс при перемагничивании: на гистерезис (потери пропорциональны частоте перемагничивания и наибольшей магнитной индукции в степени, близкой ко второй); на вихревые токи (потери пропорциональны частоте перемагничивания и магнитной индукции в квадрате). Двигатели параллельного возбуждения работают в большинстве случаев при малоизменяющихся скоростях вращения и магнитных потоках, поэтому эти потери можно считать неизменными. У двигателей с последовательным возбуждением произведение скорости вращения на магнитный поток остается примерно неизменным, что определяет некоторое уменьшение потерь при увеличении нагрузки. Вихревые токи и гистерезис оказывают тормозящее действие на якорь.
|
|
|
Механические потери рмх обусловлены трением вала якоря в подшипниках, трением щеток по коллектору при вращении, трением якоря в воздухе и вентиляционным действием при вращении якоря и вентилятора двигателя. Эти потери при малоизменяющейся скорости вращения остаются неизменными.
Добавочные потери рдоб принимаются равными 1% от мощности двигателя, в них учитываются различные трудноопределимые потери: потери в полюсных наконечниках, обусловленные пульсациями магнитного поля, и пр.
В потери холостого хода рх.х входят потери рс, рмх и рдоб:
 . (32)
. (32)
После вычитания из значения подводимой мощности Р1 потерь рм и рв получим электромагнитную мощность Рэм, передаваемую якорю, равную произведению электромагнитного момента Мэм на частоту вращения ω:
 . (33)
. (33)
Мощность на валу двигателя
 . (34)
. (34)
ЛИТЕРАТУРА
Основная
8. Касаткин В.С., Немцов М.В., Электротехника. - М.; Энергоатомиздат, 2000.
9. Основы промышленной электроники /Под ред. В.Г. Герасимова.- М.: Высшая школа, 1985.
10. Основы теории цепей; Учебник для ВУЗов. /В.П. Бакалов и др. 2-ое изд. перераб. и доп. – М.; 2000.
11. Сборник задач по электротехнике и основам электроники / Под ред. В.Г. Герасимова.- М.: Высшая школа, 1987.
12. Прянишников В.А. Электроника. - СПб; Корона принт, 2002.
13. Хоровиц П., Хилл У.. Искусство схемотехники.- М.: Мир, 1997.
14. Амочаева Г.Г. Электронный конспект лекций.
Дополнительная
6. Алексеенко А.Г., Шагурин Н.И. Микросхемотехника. Учебное пособие для вузов.- М.: Радио и связь, 1990.
|
|
|
7. Жеребцов И.П. Основы электроники.- Л.: Энергоатомиздат, 1990.
8. Попов В.П., Основы теории цепей.- Учебник для ВУЗов.- 3-е изд. испр.-М.: Высшая школа, 2000.
9. Электротехника и электроника в экспериментах и упражнениях: Практикум на Electronics Workbench. в 2-х томах, Под ред. Д.И. Панфилова ДОДЭКА, 1999.-т.1-Электроника.
10. Электротехника/Ю.М. Борисов, Д.Н. Липатов, Ю.Н. Зорин. Учебник для вузов.- 2-е изд., перераб. и доп.- М.: Энергоатомиздат, 1985.
Лекция №29-30
Электропривод
План лекции
1. Общие сведения.
2. Понятие об электроприводе.
3. Режимы работы электродвигателей. Выбор мощности.
4. Релейно-контакторное управление электродвигателями.
Общие сведения.
Электропривод – электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Теория электропривода охватывает многие вопросы, знание которых позволяет рассчитать и выбрать элементы электропривода, а также разработать схему автоматического управления как двигателем, так и всем производственным процессом в соответствии с технологическими требованиями.
К этим вопросам относятся:
- механические характеристики электроприводов в двигательном и тормозном режимах;
- регулирование частоты вращения электроприводов;
- переходные процессы в электроприводах;
- расчет пусковых, тормозных и регулировочных резисторов;
- определение мощности электродвигателя и выбор его по каталогу;
- разработка схемы управления двигателем и всем производственным процессом;
- выбор электрической аппаратуры управления.
Переходным процессом называется процесс перехода электропривода от одного установившегося состояния к другому, когда одновременно изменяются скорость, момент и ток двигателя, а также скорость и моменты всех звеньев кинематической цепи, соединяющей двигатель с рабочим органом механизма.
К переходным процессам относятся пуск, торможение и реверс электропривода, переход с одной скорости на другую, а также процессы, вызванные изменениями момента на валу двигателя, изменением напряжения сети.
|
|
|
Потери в двигателе при пуске и торможении могут оказаться соизмеримыми с потерями в установившихся режимах. Поэтому при определении мощности двигателя необходимо учитывать потери при пуске и торможении, особенно когда число пусков и торможений в час относительно велико.
Характер и длительность переходного процесса определяются моментом двигателя, моментами сил сопротивления, массами и моментами инерции движущихся тел.
Определение мощности двигателя для производственного механизма выполняется в соответствии с нагрузкой на его валу по условиям нагрева. После того как двигатель выбран по условиям нагрева по каталогу, его проверяют по перегрузочной способности и условиям пуска. Необходимо выбрать такой двигатель по номинальной мощности, при которой он бы нагревался за время работы до температуры, не превосходящей допустимую. Превышение допустимой температуры приводит к потере изоляцией электрической и механической прочности и к выходу двигателя из строя.
Завышение мощности двигателя связано с дополнительными капитальными затратами, увеличением расхода энергии, а для асинхронных двигателей – с ухудшением коэффициента мощности.
Защита силовых цепей и двигателя от коротких замыканий осуществляется плавкими предохранителями, защита двигателя от перегрева, вызванного перегрузками – тепловым реле. Включение и отключение двигателя производится электромагнитным аппаратом – контактором. В некоторых случаях вместо контактора используются автоматы или бесконтактные схемы включения на тиристорах.
Понятие об электроприводе
Электроприводом называется электромеханическое устройство, предназначенное для электрификации и автоматизации рабочих процессов. Электропривод состоит из преобразующего, электродвигательного, передаточного и управляющего устройств (рис. 1).

Рис. 1 Структурная схема электропривода
Преобразующее устройство ПрУ преобразует напряжение, ток или частоту напряжения. Оно может быть выполнено в виде магнитного усилителя, магнитного усилителя с выпрямлением, управляемого выпрямителя на тиристорах и т.д. В электродвигательном устройстве ЭДУ происходит преобразование электрической энергии в механическую.
|
|
|
Передаточное устройство ПУ служит для изменения скорости до значения, необходимого рабочему механизму РМ. Оно может быть выполнено в виде редуктора, т.е. быть неуправляемым.
Управляемое ПУ представляет собой коробку передач с электромагнитными муфтами, изменяющими ее передаточное число. Управляющее устройство УУ регулирует работу всех блоков электропривода, изменяя мощность на валу рабочего механизма, значение и частоту напряжения, схему включения электродвигателя, передаточное число коробки передач, направление вращения электродвигателя и т.д. На практике электропривод бывает автоматизированный и неавтоматизированный. В автоматизированном электроприводе человек создает только начальное управляющее воздействие (пуск электропривода). В неавтоматизированном человек периодически управляет работой электропривода в зависимости от отклонений от заданного режима.
Электроприводы делят на три группы:
1) групповые;
2) одиночные;
3) многодвигательные.
В групповых электроприводах электродвигатель с помощью механической передачи (трансмиссии) приводит в действие несколько рабочих механизмов.
В одиночных электроприводах механизм приводится в действие индивидуальным электродвигателем. При этом все элементы рабочего механизма соединяются с приводным двигателем соответствующими передачами.
В многодвигательных электроприводах каждый орган рабочего механизма снабжен своим двигателем. Так, например, на расточном станке вращение фрезы производится с помощью одного двигателя, продольное перемещение детали - другого, поперечное перемещение - третьего.
Основные элементы автоматизированного электропривода показаны на рис. 2.
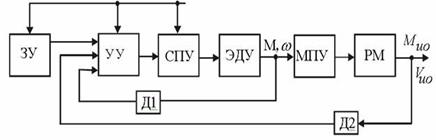
Рис. 2 Структурная схема автоматизированного электропривода
Дадим более подробную характеристику перечисленных элементов АЭП.
Под рабочими машинами понимают механические устройства, осуществляющие изменение формы, свойств, состояния и положение предметов труда или сбор, переработку и использование информации. Примерами рабочих машин для изменения формы предметов труда могут служить металлообрабатывающие станки, прессы, прокатные станы металлургического производства и др. Изменение свойств и состояния предметов труда осуществляется, например, с помощью установок для закалки, нанесения покрытий, химических установок, компрессоров и др. Для изменения местоположения объектов используются подъемные краны, лифты, эскалаторы, конвейеры, электрифицированные транспортные средства и др. Учитывая столь широкую область применения АЭП, можно сказать, что он охватывает практически все области современной техники.
|
|
|
Электродвигательное устройство является в электроприводе основным элементом, преобразующим механическую энергию в электрическую. В качестве ЭДУ используются асинхронные двигатели синхронные двигатели, двигатели постоянного тока независимого, последовательного и смешанного возбуждения, шаговые, вентильные двигатели и др.
Механическая энергия от ЭДУ передается к исполнительным органам РМ через механическое передаточное устройство (механический редуктор, цепная передача, ходовая пара «винт-гайка» и т.д.). МПУ позволяет при необходимости преобразовать выходные переменные ЭДУ в требуемые для приведения в движения РМ. Например, преобразовать вращательное движение вала двигателя в линейное перемещение суппорта токарного станка, понизить с помощью редуктора частоту вращения вала двигателя, обеспечить необходимую величину момента или усилия на исполнительном органе РМ.
Для создания регулирующего воздействия на ЭДУ используется силовое преобразовательное устройств. На вход СПУ поступают сигналы от управляющего устройства. Желаемые значения регулируемых переменных задаются с помощью задающего устройства.
Современные АЭП при жестких требованиях к качеству регулирования выходных переменных выполняются в виде замкнутых систем автоматического управления. При этом на входы УУ кроме сигналов задания поступают сигналы обратной связи, формируемые датчиками обратных связей Д1, Д2, и т.д., например, сигналы пропорциональные частоте вращения двигателя wд, моменту на валу двигателя, моменту Mио и скорости Vио исполнительного органа, и др. В замкнутой системе УУ формирует командные сигналы на СПУ в функции сигналов рассогласования, получаемых в результате сравнения задающих сигналов с сигналами соответствующих датчиков обратных связей.
Автоматизированным электроприводом называется электромеханическая система, предназначенная для приведения в движение исполнительных органов рабочих машин и управления их технологическими процессами, состоящая из задающего, управляющего, силового преобразовательного, электродвигательного и механического передаточного устройств.
В тех случаях, когда нет жестких требований к качеству управления движением исполнительных органов рабочей машины, используются более простые привода, состоящие из силового выключателя и электродвигателя.
С точки зрения способов распределения механической энергии разнообразные электроприводы можно разделить на 3 вида: групповой, индивидуальный, взаимосвязанный.
Групповой электропривод применялся на первых этапах развития техники привода и обеспечивал движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной и той же машины. Передача механической энергии и ее распределение в этом случае осуществлялось от одного двигателя с помощью трансмиссий. Очевидные недостатки такого привода – громоздкость механических связей, сложность управления движением каждого исполнительного органа. Вследствие этого групповой электропривод в настоящее время почти не применяется.
В индивидуальном электроприводе управление движением каждого исполнительного органа обеспечивается отдельным двигателем, что упрощает механические передачи, облегчает управление движением, позволяет достичь более высоких энергетических показателей.
Взаимосвязанный электропривод имеет два или несколько электрически или механически связанных между собой двигателей. Примером взаимосвязанного ЭП может служить привод цепного конвейера большой протяженности. Исполнительным органом такого конвейера служит цепь, приводимая в движение несколькими двигателями, установленными по длине конвейера. Взаимосвязанный ЭП широко применяется в транспортных установках, бумагоделательных машинах, текстильных агрегатах, прокатных станах металлургического производства и т.д. Одной из разновидностей взаимосвязанного электропривода является многодвигательный привод – это электропривод, в котором несколько двигателей работают на общий вал.
|
|
|
