 |


Частота вращения ротора асинхронного двигателя
|
|
|
|
МДС трехфазной обмотки
При включении трехфазной обмотки статора в сеть трехфазного тока в обмотках фаз появятся токи, сдвинутые по фазе (во времени) относительно друг друга на 120 эл. град
IА = IAmax sin ωt; iB = IBmax sm (ωt -120°); iC = ICmax sin(ωt - 240°).
Ток каждой обмотки создает пульсирующую МДС, а совокупное действие этих МДС создает результирующую МДС, вектор которой вращается относительно статора.
Для определения амплитуды основной гармоники МДС трехфазной обмотки необходимо
сложитъ основные гармоники МДС обмоток фаз, оси которых смещены в пространстве относительно друг друга на 120 эл. град:

fA = Fф1 sin ω1t cos α = 0,5 Fф1 [sin (ω1t – α) + sin(ω1t + α)];
fB = Fф1 sin(ω1t – 120  )cos(α – 120 ) = 0,5 Fф1[sin (ω1t – α) + sin(ω1t + α – 120 )];
)cos(α – 120 ) = 0,5 Fф1[sin (ω1t – α) + sin(ω1t + α – 120 )];
fC = Fф1 sin(ω1t– 240 )cos(α – 240 ) = 0,5 Fф1[sin (ω1t – α) + sin(ω1t + α – 120 )].
Следовательно, МДС трехфазной обмотки
f1 = fA + fB + fC =1,5 Fф1 sin(ω1t - α) = F1 sin(ω1t - α),
амплитуда МДС трехфазной обмотки на один полюс при симметричиой нагрузке фаз равна 1,5 амплитуды МДС обмотки фазы.
Способы пуска синхронных двигателей
Пуск синхронного двигателя непосредственным включением в сеть невозможен, так как ротор из-за своей значительной инерции не может быть сразу увлечен вращающимся полем статора, частота вращения которого устанавливается мгновенно. В результате устойчивая магнитная связь между статором и ротором не возникает.
В настоящее время практическое применение имеет асинхронный пуск. Этот способ пуска возможен при наличии в полюсных наконечниках ротора пусковой обмотки (клетки), аналогичной успокоительной обмотке синхронного генератора. Невозбужденный синхронный двигатель включают в сеть. Возникшее при этом вращающееся магнитное поле статора наводит в стержнях пусковой клетки ЭДС, которые создают токи  .
.
|
|
|

Взаимодействие этих токов с полем статора вызывает появление на стержнях пусковой клетки электромагнитных сил  . Под действием этих сил ротор приводится во вращение После разгона ротора до частоты вращения, близкой к синхронной
. Под действием этих сил ротор приводится во вращение После разгона ротора до частоты вращения, близкой к синхронной  , обмотку возбуждения подключают к источнику постоянного тока. Образующийся при этом синхронный момент втягиваем ротор двигателя в синхронизм. После этого пусковая обмотка двигателя выполняет функцию успокоительной обмотки, ограничивая качания ротора.
, обмотку возбуждения подключают к источнику постоянного тока. Образующийся при этом синхронный момент втягиваем ротор двигателя в синхронизм. После этого пусковая обмотка двигателя выполняет функцию успокоительной обмотки, ограничивая качания ротора.
Чем меньше нагрузка на валу двигателя, тем легче его вхождение в синхронизм. Явнополюсные двигатели малой мощности, пускаемые без нагрузки на валу, иногда входят в синхронизм лишь за счет реактивного момента, т. е. даже без включения обмотки возбуждения.
При асинхронном пуске синхронного двигателя возникает значительный пусковой ток. Поэтому пуск синхронных двигателей непосредственным включением в сеть на номинальное напряжение применяют при достаточной мощности сети, способной выдерживать без заметного падения напряжения броски пускового тока пяти- или семикратного значения (по сравнению с номинальным током). Если же мощность сети недостаточна, то можно применить пуск двигателя при пониженном напряжении (см. § 15.2): автотрансформаторный или реакторный.
Регулирование частоты вращения асинхронного двигателя
Частота вращения ротора асинхронного двигателя
n2 =n1(1 - s) = (f160/ p)(l - s).
Регулирование частоты вращения изменением подводимого напряжения. Возможность этого способа регулирования подтверждается графиками М = f (s), построенными для разных значений U1.
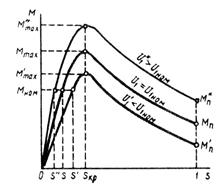
При неизменной нагрузке на валу двигателя увеличение подводимого к двигателю напряжения вызывает рост частоты вращения. Однако диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя, ограниченным значением критического скольжения и недопустимостью значительного превышения номинального значения напряжения.
|
|
|
Подводимое к двигателю напряжение изменяют либо регулировочным автотрансформатором, либо реакторами, включаемыми в разрыв линейных проводов.
Узкий диапазон регулирования и неэкономичность (необходимость в дополнительных устройствах) ограничивают область применения этого способа регулирования частоты вращения.
Регулирование частоты вращения изменением частоты тока в статоре.
Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой (преобразователи частоты). Чтобы регулировать частоту вращения, достаточно изменить частоту тока f 1. Но с изменением частоты f 1 = ω1p/ (2π) будет изменяться и максимальный момент. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f 1 изменять и напряжение питания U1.
Частотное регулирование двигателей позволяет плавно изменять частоту вращения в широком диапазоне (до 12:1). Однако источники питания с регулируемой частотой тока удорожают установку.
Регулирование частоты вращения изменением числа полюсов обмотки статора.
Этот способ регулирования частоты вращения дает ступенчатую регулировку (см. формулу).
Изменять число полюсов в обмотке статора можно либо укладкой на статоре двух обмоток с разным числом полюсов, либо укладкой на статоре одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Последний способ получил наибольшее применение.
Принцип преобразования четырехполюсной обмотки в двухполюсную (для одной фазы) показан на рис. 15.12: при последовательном согласном соединении двух катушек возбуждаемое ими магнитное поле образует четыре полюса (рис. 15.12, а); при последовательном встречном (рис. 15.12, б) или параллельном соединениях (рис. 15.12, в) — два полюса. Таким образом, принцип образования полюсно переключаемой обмотки основан на том, что каждая фаза обмотки делится на части (катушечные группы), изменяя схему соединения которых получают разное число полюсов.
|
|
|

Если на статоре расположить две полюсно переключаемые обмотки, то получим четырехскоростной двигатель. Однако возможно применение и одной обмотки, допускающей путем переключения катушечных групп получение до четырех вариантов различных чисел полюсов.
Регулирование частоты вращения изменением числа полюсов на статоре применяют исключительно в асинхронных двигателях с короткозамкнутым ротором, так как число полюсов в обмотке этого ротора всегда равно числу полюсов статора и для изменения частоты вращения достаточно изменить число полюсов в обмотке ротора. В случае же фазного ротора пришлось бы и на роторе применить полюсно переключаемую обмотку, что привело бы к недопустимому усложнению двигателя.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора.
Этот способ регулирования частоты вращения возможен лишь в двигателях с фазным ротором. С увеличением активного сопротивления ротора возрастает скольжение, соответствующее заданному нагрузочному моменту.

Частота вращения двигателя при этом уменьшается.
Практически изменение активного сопротивления цепи ротора достигается включением в цепь ротора регулировочного реостата (РР), подобного пусковому реостату (ПР) (см. рис. 15.2), но рассчитанного на длительный режим работы. Уменьшение частоты вращения (увеличение скольжения) сопровождается ростом электрических потерь в цепи ротора и снижением КПД двигателя. Так, если при неизменном нагрузочном моменте на валу двигателя увеличить скольжение от 0,02 до 0,5, что соответствует уменьшению частоты вращения примерно вдвое, то потери в цепи ротора составят почти половину электромагнитной мощности двигателя. Это свидетельствует о неэкономичности рассматриваемого способа регулирования. К тому же необходимо иметь в виду, что рост потерь в роторе сопровождается ухудшением условий вентиляции из-за снижения частоты вращения, что приводит к перегреву двигателя.
|
|
|
Рассматриваемый способ регулирования имеет еще и тот недостаток, что участок механической характеристики, соответствующий устойчивой работе двигателя, при введении в цепь ротора добавочного сопротивления становится более пологим и колебания нагрузочного момента на валу двигателя сопровождаются значительными изменениями частоты вращения ротора.
Но несмотря на указанные недостатки, рассмотренный способ регулирования частоты вращения широко применяется в асинхронных двигателях с фазным ротором. Способ обеспечивает регулирование частоты вращения в широком диапазоне, но только вниз от синхронной частоты вращения. Вместе с тем он обеспечивает двигателю улучшенные пусковые свойства.
|
|
|
