 |


Рис. 8. Построение линии заданного уклона
|
|
|
|
Рис. 8. Построение линии заданного уклона
с помощью лазерного нивелира
C - отсчет по рейке
Если уровень нивелира контактный, сначала устанавливают излучатель в горизонтальное положение, совмещают концы пузырька уровня, а затем наклоняют излучатель, смещая пузырек уровня на указанное число делений.
Для закрепления линии с заданным уклоном на местности вдоль по створу забивают колья на такую глубину, чтобы отсчеты по рейке, устанавливаемой на эти колья, были равны между собой. Если хотя бы одна точка должна иметь заданную отметку, забивку кольев начинают с этой точки, т. е. с вынесения в натуру заданной отметки.
Для создания опорной линии заданного уклона наиболее удобны лазерные приборы, снабженные уклономерами, позволяющими придать излучателю заданный уклон с достаточно высокой точностью. Такими приборами являются ЛВ-5 (СССР), LT-3 (США), CG-68 (ФРГ) и др. Методика построения опорной линии при использовании таких приборов такая же, как и в предыдущем случае.
Если не требуется установка пучка излучения параллельно проектной линии, а нужно лишь закрепить линию заданного уклона на местности, лазерным нивелиром пользуются как нивелиром обычным.
Выносят в натуру и закрепляют кольями отметки начальной и конечной точек линии. Промежуточные точки разбивают с помощью лазерного нивелира, установленного наклонно, возможно ближе к проектной линии, так чтобы два его подъемных винта расположились перпендикулярно ее направлению. Действуя третьим винтом, наклоняют нивелир, добиваясь, чтобы отсчеты в центре лазерного пятна по рейкам, установленным на кольях в концах проектной линии, были одинаковыми. Если после этого установить рейку в любой точке створа и, поднимая или опуская ее, добиться, чтобы отсчет по ней был равен отсчету на конечных точках, пятка рейки будет находиться на линии с заданным уклоном. Эту линию закрепляют кольями, забиваемыми на соответствующую глубину.
|
|
|
Способы геодезического контроля уклона дна
разрабатываемых траншей
2. 3. Для контроля уклона дна разрабатываемой траншеи применяют традиционные способы (способ визирок, способ геометрического нивелирования) и способ автоматического регулирования глубины копания траншей.
2. 4. Наиболее распространенным является способ регулирования уклона по Т-образным визиркам. Они устанавливаются через 15 - 20 м на линии, параллельной оси траншеи и отстоящей от нее на величину, равную половине расстояния между внутренними гранями гусениц экскаватора. Поперечные планки визирок посредством геометрического нивелирования располагают на линии, параллельной проектному дну траншеи. Машинист экскаватора контролирует глубину копания по заметке на рукояти, вертикально поставленной в проверяемой точке дна траншеи. Глубина копания может контролироваться с помощью шарнирно соединенного с рабочим органом уклоноуказателя в виде стержня, уравновешенного грузом. При отрывке траншеи уклоноуказатель должен находиться на одной линии с верхними гранями визирок. Управляя рычагами, оператор компенсирует возникающие отклонения уклоноуказателя соответствующими вертикальными перемещениями рабочего органа (рис. 9).
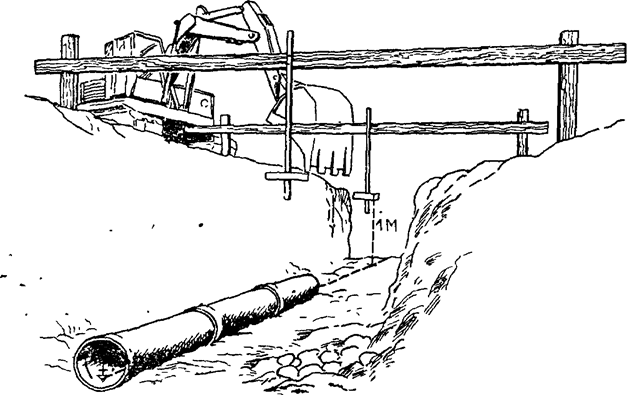
Рис. 9. Отрывка траншеи с помощью визирок
Способ контроля с помощью визирок трудоемок и не всегда соответствует высоким требованиям к точности отрывки траншеи с заданным уклоном. Основной недостаток описанного способа состоит в том, что точность соблюдения уклона в значительной степени зависит от внимательности и мастерства оператора. Практика показала, что, находясь на машине и подвергаясь толчкам и вибрациям, оператор быстро устает. Это приводит к снижению точности регулирования глубины копания. Кроме того, этот способ не исключает геометрического нивелирования на стадиях подготовки, зачистки дна и укладки труб.
|
|
|
2. 5. Контроль уклона дна способом геометрического нивелирования состоит в том, что сначала на местности намечают ось траншеи, правее которой на расстоянии 1, 4 м через 20 м забивают колышки. Затем колышки нивелируют и на них указывают глубину траншеи. Дно траншеи недобирается на 5 см, так как укладка труб в траншею должна производиться на ненарушенный грунт.
Вслед за экскаватором производится контрольное нивелирование дна траншеи. Отклонение фактических отметок дна траншеи от проектных не должно превышать нормативных значений. Зачистка дна траншеи до проектных отметок производится вручную непосредственно перед укладкой труб.
2. 6. Способы автоматического регулирования глубины копания траншеи и соблюдения проектного уклона можно разделить на две основные группы:
1) датчик уклона (направляющая проволока, световой луч, электромагнитный луч и т. д. ) устанавливают отдельно от землеройной машины, и в течение рабочего процесса он остается неподвижным; регулируемым параметром является отклонение по высоте режущей точки рабочего органа от линии заданного уклона (неавтономные способы);
2) датчик уклона (маятник, уровень, гироскоп и т. д. ) устанавливают на машине; регулируемым параметром служит угловое отклонение траектории режущей точки от заданного направления (автономные способы).
В настоящее время на всех советских экскаваторах (ЭТН-142, ЭНТ-171, ЭТЦ-202, ЭТЦ-163) и на многих зарубежных применяется система регулирования глубины копания (уклона) по копиру, в качестве которого используется тонкий тросик, натянутый над проектной линией дрены на высоте
k = h + H,
где k - высота копира над проектной линией дрены;
h - глубина траншеи;
H - высота копира над землей.
Уклон между точками подвеса троса устанавливается равным уклону дна траншеи. По данным разбивки опоры устанавливаются на высоту
H = k - h.
При работе экскаватора по тросику перемещается щуп, связанный с рабочим органом экскаватора. В случае отклонения рабочего органа от проектной линии изменяется положение щупа относительно троса, при этом вырабатывается сигнал, возвращающий щуп, а, следовательно, и рабочий орган механизма в требуемое положение.
|
|
|
Применение тросика как копира имеет преимущества перед другими способами отрывки траншей под определенным уклоном, заключающиеся в простоте и надежности системы. Рассмотрим основные источники погрешностей этого способа.
Основной погрешностью выдерживания уклона является провисание троса от собственной массы и массы следящего щупа. Величина провисания троса от собственной массы в любой точке пролета может быть найдена по формуле

где  - величина провисания троса в точке k, находящейся от опоры на расстоянии xk;
- величина провисания троса в точке k, находящейся от опоры на расстоянии xk;
l - расстояние между опорами;
q - масса 1 м троса;
W - сила натяжения троса.
Величина провисания троса вследствие воздействия массы следящего щупа P определяется по формуле

Сложив правые части выражений, определяющих и  , получим общую величину провисания троса
, получим общую величину провисания троса

Наибольшее провисание троса будет наблюдаться в середине пролета, когда

Уменьшение отклонений копирного троса от проектной линии возможно за счет:
уменьшения массы 1 м (диаметра) троса  ;
;
уменьшения расстояния между опорами l;
уменьшения давления щупа на копир Q;
увеличения силы натяжения W.
Экскаваторы снабжаются тросиками диаметром 2, 5 и 3, 4 мм; разрывное усилие которых 2970 и 5660 Н. Даже при коэффициенте запаса n = 5 натяжение этих тросиков составляет 600 и 1150 Н. Обеспечение такого натяжения затруднительно, а при усилии W = 500 Н провисание больше, чем у тросиков меньшего диаметра. Обрывы копирного тросика бывают, как правило, в местах образования петель, помятостей и т. д. Меры предосторожности позволяют избежать нарушения формы тросика и применять тросики с небольшой собственной массой (диаметром 1, 4 - 2 мм). Это позволяет повысить точность поддержания глубины, снижает трудоемкость работ и расход троса.
|
|
|
В настоящее время расстояние между опорами принимается равным 10 м, между пикетами - 20 м. Уменьшение указанных расстояний хотя и эффективно, но практически неприемлемо из-за повышения трудоемкости установки троса и металлоемкости опор.
Основным способом повышения точности соблюдения проектного уклона дна траншеи является увеличение силы натяжения троса. Однако увеличение силы натяжения троса имеет определенные пределы целесообразности.
Сила давления щупа на копир Q в зависимости от вида уклоноуказателя составляет от 0, 5 до 2, 5 Па. При Q < 0, 5 Па слежение щупа за тросиком из-за вибраций, раскачки и т. п. может быть ненадежным.
Варьируя диаметр тросика, его натяжение, расстояние между опорами и давление щупа, а также учитывая проектный уклон дрены, можно обеспечить точность задания проектного уклона траншеи. В то же время возможности повышения точности задания проектного уклона и снижение трудоемкости установки тросика ограничены. Для преодоления этих ограничений целесообразно, особенно при малых уклонах дрены, применять схему использования копирного тросика с воздействием на него снизу. Это воздействие может быть осуществлено двумя способами: щупом, скользящим под тросиком, и дополнительной подвижной опорой тросика с одновременным использованием обычного верхнего щупа.
Поскольку копирный трос устанавливается в стороне от оси траншеи, при движении экскаватора по неровностям вследствие поперечного наклона возникают дополнительные погрешности в уклоне дна траншеи. Поэтому для обеспечения отрывки экскаватором траншеи с проектным уклоном предварительно необходимо спланировать трассу траншеи.
Этот способ контроля уклона траншей может быть усовершенствован путем замены щупа с контактной коробкой рамкой потенциометра. В этом случае регулирование осуществляется более точно и плавно. Другое усовершенствование заключается в замене проволоки нейлоновой струной, натянутой с заданным уклоном на высоте 0, 3 м от поверхности земли. Сила натяжения, измеряемая специальным динамометром, равна 36 кг. Сила давления рамки потенциометра на струну составляет 0, 08 Па. Положение струны контролируется установленными вдоль нее колышками.
Вместе с достоинствами рассматриваемого способа обеспечения отрывки траншеи с заданным уклоном и возможностями его совершенствования способ обладает рядом недостатков: большим объемом подготовительных геодезических работ, связанных с установкой троса; необходимостью предварительной планировки трассы траншеи; низкой точностью соблюдения задаваемого уклона.
|
|
|
При дистанционном регулировании уклона направляющей линией может служить визирная ось оптического инструмента, параллельная линии проектного дна траншеи. В этом случае отпадает необходимость установки визирок или направляющей проволоки. Предварительные работы ограничиваются установкой нивелира в начале трассы и рейки в конце ее. Оператор следит в нивелир, чтобы фиксированная точка, расположенная на постоянной высоте над режущей кромкой рабочего органа, оставалась на визирной линии. При отклонении от нее оператор с помощью радиопередатчика или электрического кабеля передает сигналы управления приемному или усилительному устройствам, установленным на тракторе. Усиленный сигнал воздействует на механизм управления рабочим органом, заставляя его отрабатывать возникшее отклонение.
При дистанционном управлении оператор не подвергается влиянию шума, толчков и вибраций и ему легче выполнять свои функции. Наибольшую экономию труда за счет сокращения объема предварительных работ дает применение дистанционного регулирования уклона в условиях ровного рельефа, где траншеи проектируют с одинаковым по всей длине уклоном. Если уклон по длине траншеи необходимо менять, число необходимых стоянок нивелира увеличивается и процесс становится более трудоемким.
2. 7. Среди неавтономных систем наиболее широкое применение нашел прибор управления лучом (ПУЛ), разработанный в 1961 г. в Ленинградском институте точной механики и оптики.
Прибор позволяет дистанционно управлять глубиной копания землеройных машин, в частности траншеекопателя, для прокладки дрен. Система ПУЛ имеет направляющую и приемную станции. Направляющая станция (прожектор) формирует луч с небольшим углом расходимости (1°10'). Луч, выходящий из прожектора, разделен оптически на две части, модулированные различными частотами. Кроме этого, в двух плоскостях луч делится на три части, каждая из которых модулирована частотами f1, f2, f3 соответственно. Прожектор устанавливается в 35 - 40 м от начала закладки траншеи так, чтобы равносигнальная зона была направлена с уклоном, который должна иметь дрена.
Приемная станция включает в себя фотоприемник, усилитель и пульт управления. Фотоприемник монтируется над режущей кромкой рабочего органа. Если объектив фотоэлемента, соединенного с рабочим органом, находится на оси прожектора, в него попадают одинаковые количества энергии, модулированной частотами f1 и f2 (при управлении в одной плоскости). При смещении объектива вверх или вниз появляется сигнал рассогласования, обусловленный преобладанием светового сигнала той или иной частоты.
Сигнал с фотоэлемента поступает в широкополосный усилитель, затем в селекторный каскад, имеющий два контура, остро настроенных на частоты f1 и f2. Разделенные по частотам сигналы выпрямляются и сравниваются в мосте, откуда разностный сигнал идет в выходной усилитель и далее на исполнительный привод машины, который перемещает рабочий орган и наводит ось объектива фотоприемника на ось луча, а, следовательно, и рабочий орган машины на проектную отметку.
Точность работы ПУЛов зависит от ширины равносигнальной зоны (РСЗ), которая увеличивается с расстоянием и может достигать ширины 3 - 5 см, от возможного систематического " ухода" луча вследствие температурной деформации корпуса передатчика, от погрешностей, обусловленных турбулентными движениями воздушных масс (особенно в жаркую погоду при низком расположении луча над поверхностью земли).
Приборы ПУЛ можно применять для управления землеройными машинами, имеющими гидравлическую систему управления рабочим органом. К числу недостатков автоматизированной системы ПУЛ относится несогласованность технических данных ПУЛов с гидравлической системой землеройных машин. Так, изменение направления движения рабочего органа " висящего" луча вверх или вниз происходит с частотой до двух переключений в 1 с, что составляет несколько тысяч переключений в 1 ч, т. е. 15 - 20% общего ресурса переключений гидравлической системы.
2. 8. Бескопирные (автономные) системы автоматического регулирования могут быть разомкнутыми и замкнутыми, т. е. иметь устройства, контролирующие правильность выполнения рабочим органом получаемых команд. Применение автономных систем почти полностью исключает трудоемкие операции по нивелировке трасс и установке направляющих устройств. Датчиками в автономных системах могут служить маятник и гироскоп. Гироскопические устройства позволяют регулировать глубину с точностью 2 см, уклон - с точностью 0, 001.
Недостатком автономных систем регулирования уклона является то, что по мере продвижения машины возможно накопление погрешностей по высоте. Поэтому к точности и устойчивости работы автономных систем предъявляются повышенные требования. Увеличение точности регулирования достигается введением обратной связи. Устойчивость работы системы можно повысить применением так называемой плавающей навески рабочего органа.
Известны результаты испытания автоматического регулятора уклона с маятниковым датчиком. Установлено, что существует зависимость между уклоном дна траншеи и наклоном рамы роторного колеса. Угол наклона рамы был принят в качестве регулируемого параметра. Датчик, выполненный в виде маятника длиной 0, 9 м и массой 16 кг, помещен в сосуд, залитый демпфирующей жидкостью. Он устанавливается на раме землеройной машины.
При отклонении угла наклона рамы от заданного маятник включает один из микровыключателей, расположенных по обе стороны стержня. Всего имеется две пары выключателей для быстрой и медленной коррекции.
Точность соблюдения уклона зависит от точности и своевременного действия автоматического устройства, а также от типа и параметров землеройной машины.
В настоящее время создано оборудование для автоматического управления землеройными машинами, использующее лазерные геодезические приборы. Использование опорного лазерного луча позволяет контролировать глубину и уклон разрабатываемой траншеи практически непрерывно.
Использование лазерного визира при укладке трубопроводов
2. 9. Для укладки трубопроводов может быть успешно использован лазерный визир ЛВ-5.
Лазерный визир ЛВ-5 предназначен для задания и разбивки створов, нивелирования, а также для управления строительными механизмами. Этот прибор создан на базе гелиево-неонового лазера ОКГ-13. Потребляемая мощность прибора 20 Вт, выходная 0, 75 мВт, длина волны излучения 0, 6328 мкм, расходимость луча 30" . Питание прибора осуществляется от сети переменного тока или от аккумуляторов напряжением 12 В. Угол поворота прибора в горизонтальной плоскости 360°, в вертикальной - 20°. Для плавной и точной наводки имеются микрометренные винты, позволяющие регулировать положение прибора в диапазоне (+5°) - (-5). Цена деления отсчетных устройств винта 15" . Ось прибора приводят в отвесное положение подъемными винтами подставки по контактному цилиндрическому уровню с ценой деления 20" . Для приближенной установки прибора имеется круглый уровень.
При задании уклонов с помощью визира ЛВ-5 необходимо определять отсчет по отсчетному устройству вертикального круга (MO), соответствующий горизонтальному положению луча, предварительно установив вертикальную ось прибора в отвесное положение. При необходимости задания угла наклона на шкале отсчетного устройства вертикального круга устанавливают отсчет  .
.
Порядок укладки трубопроводов. В начале траншеи, на ее оси, где отметка дна соответствует проектной, устанавливается штатив с визиром ЛВ-5, закрепленным с помощью приспособления, позволяющего перемещать прибор по высоте, а также влево или вправо относительно оси трубопровода. Отметка лазерного луча в начальной точке должна равняться:
H' = Hпр + rвн,
где Hпр - проектная отметка дна траншеи;
rвн - внешний радиус укладываемой трубы.
Затем на расстоянии 20 - 30 м от прибора фиксируется вторая точка оси трубопровода и с помощью наводящих винтов ЛВ-5 ось лазерного луча совмещается с этой точкой. Контроль за отметками дна траншеи осуществляется по нивелирной рейке. Для выдерживания требуемого уклона трубопровода центр лазерного пятна должен располагаться на отсчете, равном внешнему радиусу трубы. При укладке трубопровода на участках с различными уклонами лазерный визир устанавливают в точках изменения уклона.
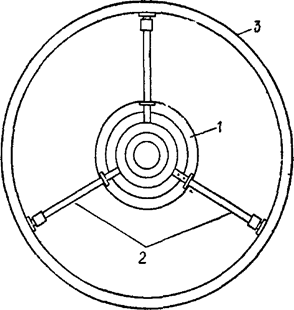
Контроль укладки труб осуществляется с помощью марки, устанавливаемой на торце трубы. На марке, изготовленной из оргстекла, нанесены концентрические окружности, с центром которых при правильной укладке труб должна совпадать ось лазерного луча (рис. 10). Центрируется марка в трубе с помощью трех упорных винтов.
|
|
|
