 |


Расчет амортизационных отчислений
|
|
|
|
Расчет годовой фонд заработной платы
4.3 Смета затрат на эксплуатацию и содержание оборудования
4.4 Технико-экономические показатели
5. Техника безопасности при ремонте экскаваторов
6. Мероприятия по гражданской обороне
7. Охрана окружающей среды
Список литературы
Введение
Горные работа на карьерах тяжелой промышленности полностью механизированы и одной из основных машин на открытых горных разработках являются одноковшовый экскаватор.
Для вскрытия и добычи полезного ископаемого при погрузке породы, угля и руды в железнодорожные вагоны и автосамосвалы применяются одноковшовые электрические экскаваторы.
Карьерные одноковшовые экскаваторы являются сложными машинами, имеющими несколько главных и вспомогательных механизмов. Электрическое оборудование экскаваторов, при требовании большой надежности с точки зрения эксплуатации и техники безопасности, является также довольно сложным вследствие высокого технического уровня применяемых электроприводов и концентрации машин и аппаратов на незначительной площади.
При эксплуатации электрического оборудования существует повышенная опасность поражения электрическим током. Наличие на экскаваторах различных напряжений усложняет защиту от поражения электрическим током. Повышенная опасность поражения электрическим током требует особого внимания к выбору напряжения, режиму работы нейтрали, устройству заземлений, контролю изоляции и т.п. Большая разбросанность работ, применение, наряду со стационарными, передвижных подстанций и киосков создают большие трудности устройства защитных заземлений, контроля состояния сети, защитных средств.
|
|
|
1. Общая часть
1.1 Характеристика предприятия
Златопольский завод по производству щебня находиться в 5 км. от г. Щучинска, занимает земли Златопольского совхоза.
Завод начал функционировать с 1975г. Проект составлен ГГПН "Каздорпроект" в 1975г. Общий объем запасов полезных ископаемых – 37159,55 т.м3. Добыча полезных ископаемых в год 12550000 м3, вскрыша 20000 м3.
Ширина карьера 330 м, длинна карьера 1250, угол откоса карьера 80 градусов, схема транспортировки горной массы тупиковая.
Основной деятельностью завода является переработка горных пород и производством следующих строительных материалов: песок, щебень 3 фракций:
1) щебень диаметром 5х10 мм (отсев)
2) щебень диаметром 10х20 мм (используется для строительство зданий)
3) щебень диаметром 20х40 мм (используют для строительства дорог)
Также на предприятии имеется асфальтный завод (АБЗ), на котором делают горячий асфальт для строительство дорог.
1.2 Краткая техническая характеристика и описание основных узлов
Экскаватор типа ЭКГ-4,6 (Э – экскаватор, К – карьерный, Г – на гусеничном ходу, 4 – емкость ковша 4,6 м2) предназначен для разработки и погрузки горных масс в транспортные средства, находящиеся на одном уровне с экскаватором. Поэтому его оснащают только одним видом рабочего оборудования – прямой лопатой (рис. 1), состоящей из: ковша для черпания грунта 1; рукоятки 2, передающей закрепленному на ней ковшу напорное усилие, в результате чего зубья ковша врезаются в грунт; стрелы 3 с головным блоком 4 и подъемным канатом 5 для ковша, а также напорного механизма 6 и механизма открывания днища 7. Экскаватор имеет поворотную платформу 8 и ходовую тележку 9. Питание энергией осуществляется по силовому кабелю 10. На экскаваторе имеется основные (главные) и вспомогательные механизмы. К главным рабочим механизмам относятся механизмы, непосредственно участвующие в процессе экскавации: напорный механизм, подъемная лебедка и поворотный механизм.
|
|
|
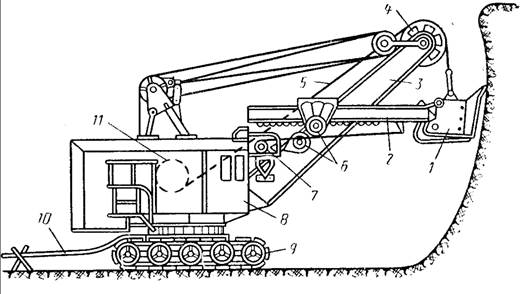
Рис.1 Общий вид экскаватора типа ЭКГ-4,6
1.3 Технические особенности и кинематические схемы
Для каждого механизма – подъемного, поворотного, ходового и напорного применены отдельные приводы электрических двигателей постоянного тока, эти двигатели питаются от пятимашиного агрегата состоящего из электродвигателя который приводит в движение генераторы. Генераторы постоянного тока предназначенные для питания двигателей постоянного тока.

Рис.2 Кинематическая схема механизма хода
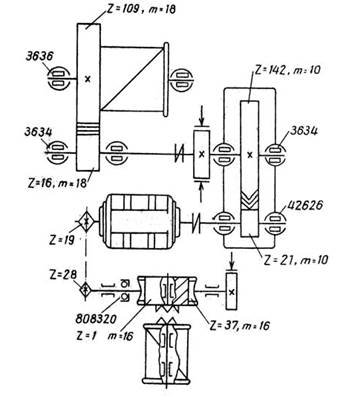
Рис.3 Кинематическая схема подъемной и стреловой лебедки

Рис.4 Кинематическая схема механизма поворота

Рис.5 Кинематическая схема механизма открывания днища ковша

Рис.6 Кинематическая схема механизма напора
1.4 Описание режимов и циклов работы отдельных узлов
Процесс экскавации слагается из отдельных циклов работы экскаватора. В свою очередь цикл работы экскаватора-лопаты состоит из следующих операций: опускание ковша в забой; копание, во время которого производится подъем ковша; поворот платформы к месту выгрузки; открывание днища ковша и разгрузки; возвращение в забой с закрыванием ковша. Во время копания величина снимаемого слоя породы (стружки) и скорость заполнения ковша регулируются увеличением или уменьшением усилия напора, вследствие чего рукоять с ковшом подается в забой или выдвигается из него, изменяя величину снимаемой стружки.
После завершения цикла операции повторяются и совершаются новые циклы, пока не будет полностью разработан слой грунта в зоне копания, что определяется полным выдвижением рукояти. Затем экскаватор передвигается ближе к забою.
Режим работы электроприводов основных рабочих механизмов экскаватора характеризуется большим числом включений, резкими изменениями нагрузки, частыми изменениями направления вращения (реверсированием).
2. Расчетная часть
2.1 Требование к электроприводу механизмов экскаватора
2.1.1 Механизм поворота
Основным требованием к электроприводу механизма поворота является обеспечение протекания переходных процессов в минимально возможное время с ограниченным ускорением или замедлением, в особенности при торможении. Такое требование вызвано тем, что механизм поворота работает исключительно в переходных процессах пуска, реверсирования и торможения, так как он обладает значительной массой, которая в несколько раз превышает маховую массу двигателя. Кроме того, вследствие большого передаточного отношения редуктора механизма поворота могут быть значительные люфты в передачах, что тоже требует плавного разгона во избежание резких ударов в передачах.
|
|
|
2.1.2 Механизм подъема
Механизм подъема работает в условиях резко переменной нагрузки, значительно превышающей номинальную. В отдельных случаях нагрузка может быть настолько велика, что возникает опасность разрушения отдельных звеньев механической передачи.
2.1.3 Механизм напора
Еще тяжелее условия работы механизма напора. Наиболее характерной особенностью работы этого механизма является возможность его вынужденной остановки во время работы в случае встречи ковша с непреодолимым препятствием. Такой режим работы называется работой на упор или стопорением. Следовательно, для обеспечения надежной и безаварийной работы рабочего механизма требуется снижение момента (нагрузки) до допускаемых пределов при стопорении и известная податливость его приводного двигателя (мягкость характеристики), с тем чтобы скорость двигателя могла быть автоматически замедлена при достаточно большом увеличении нагрузки.
2.2 Выбор рода тока и величины питающих напряжений
На экскаваторах средней мощности применяются многодвигательный электропривод постоянного тока, который имеет преобразовательную установку, состоящую из трехфазного сетевого (приводного) двигателя и нескольких генераторов постоянного тока – для питания двигателей главных механизмов. Для вспомогательных механизмов применяются асинхронные двигатели с короткозамкнутым ротором.
В качестве приводного двигателя и для вспомогательных механизмов применяются асинхронные двигатели с короткозамкнутым ротором.
|
|
|
Энергия к экскаватору, находящемуся в забое, подводится гибким четырехжильным кабелем, подключаемым через передвижной приключательный пункт к внутрикарьерной линии электропередач на напряжение – 6 кВ. По трем жилам кабеля осуществляется питание электрооборудования, а четвертая жила служит для надежного заземления корпуса экскаватора.
Питание двигателей вспомогательных механизмов осуществляется на напряжение 0,4 кВ, получаемое от трансформатора собственных нужд, установленном в передвижном приключательном пункте.
2.3 Выбор системы электропривода и методов регулирования скорости
Требуемые механические экскаваторные характеристики приводов главных рабочих механизмов экскаватора легче всего осуществить, когда каждый главный рабочий механизм: подъем, поворот, напор или тяга, оборудуются двигателем постоянного тока независимого возбуждения, питающихся от отдельного источника питания – генератора постоянного тока, напряжение которого можно плавно регулировать от нуля до полной величины ± Uг с помощью реостата. Такая система регулируемого электропривода называется системой генератор – двигатель и сокращенно обозначается Г-Д.
Генераторы приводятся во вращение приводным (или, как принято его называть, сетевым) двигателем, частота вращения которого не изменяется. В качестве приводного двигателя, на карьерных экскаваторах применятся асинхронные двигатели с короткозамкнутым ротором.
2.4 Расчет мощности двигателей привода механизма экскаватора
Расчет мощности двигателей главных приводов механизмов выполняются на основе кинематической схемы с использованием эмпирических формул.
2.4.1 Подъемный двигатель
Мощность двигателя подъемного рассчитывается по формуле:
 , кВт
, кВт
 , кВт
, кВт
где Gк – вес порожнего ковша, кг
Gr – вес грунта в ковше, кг
Gp – вес рукояти, кг
F – сила сопротивления грунта копанию, кгс
υч – скорость копания грунта, т.е. скорость подъема ковша при копании, м/сек
ηп – к.п.д. подъемного механизма.
Усилие копания определяется по формуле:
 , кгс
, кгс
 , кгс
, кгс
где ƒ – удельное сопротивление грунта копанию, кгс/м2
V – емкость ковша, м2
kp – коэффициент разрыхления грунта
h – высота копания, м
2.4.2 Двигатель напора
Определяется мощность двигателя исходя из того, что давление ковша экскаватора на забой Fн, создаваемое напорным механизмом, ровно 0,6 от тягового усилия на подъемном канате, т.е.

 =15170,4
=15170,4
Скорость перемещения рукоятки определяем исходя из перемещение рукояти при копании на 0,75 ее длины за время копания:
|
|
|
 , м/сек
, м/сек
 , м/сек
, м/сек
где  – длина рукояти, м
– длина рукояти, м
tk – время копания, сек
Таким образом, мощность двигателя напорного механизма:
 , кВт
, кВт
 , кВт
, кВт
где ηн – к.п.д. напорного механизма.
2.4.3 Двигатель поворота
Статическая мощность поворотного двигателя
 , кВт
, кВт
 , кВт
, кВт
где n – наибольшая скорость вращения двигателя, об/мин
Mc – статический момент сопротивления механизма поворота, приведенный к валу двигателя, кгс·м
Статический момент сопротивления определяется по формуле:
 , кгс·м
, кгс·м
 , кгс·м
, кгс·м
где Q – суммарный вес поворотной платформы, т.е. вес всех вращающихся частей экскаватора, кгс
μ – коэффициент трения втулки катка по цапфе
rц – радиус цапфы катка, см
ρ – коэффициент трения качения катка, см
Rкат – средний радиус опорного круга, м
rк – радиус катка, см
iпер – передаточное число механизма поворота
ηпер – к.п.д. передачи механизма поворота.
Рд ≈ 3Рс = 3·20,2=60,6, кгс·м
 , кгс·м
, кгс·м
 , кгс·м
, кгс·м
2.4.4 Выбор мощности сетевого двигателя
Мощность сетевого (приводного) двигателя определяется суммой мощностей работающих одновременно двигателей. Так как механизм подъема и механизм напора работают одновременно, то суммарная мощность составит
ΣР= 159+45,2=214,2 кВт
Поэтому за расчетную мощность сетевого двигателя
Ррасч = ΣР=214,2 кВт
2.4.5 Расчет мощности вспомогательных двигателей
Так как расчет мощности вспомогательных механизмов требует дополнительного механического расчета, то за расчетную мощность принимается мощности двигателей механизмов, устанавливаемых комплектно с экскаватором.
2.5 Выбор типов двигателей
Исходя из требований предъявляемых к электроприводам механизмов ЭКГ-4,6 необходимо применять двигатели постоянного тока, работающие по системе "Г-Д". Следовательно одновременно с выбором двигателей непосредственно выбираются генераторы постоянного тока.
В качестве приводного (сетевого) двигателя для экскаватора ЭКГ-4,6 целесообразно использовать высоко вольтный асинхронный двигатель с коротко замкнутым ротором.
Для привода вспомогательных механизмов применятся низко вольтные асинхронные двигатели с коротка замкнутым ротором.
Тип выбираемого двигателя определяет его расчетную мощность и требуемой частоты вращения. Данные выбранного двигателя приведенные в таблице.
Таблица 1 Технические данные двигателей
| Машина | Рр кВт | Рн кВт | Uн В | Cos φa | Iя | Частота вращения, об/мин | ||
| Наименование | Тип | |||||||
| Генератор: | ||||||||
| подъема | ПЭМ-2000 | - | 192 | 451 | - | 425 | 1480 | |
| поворота-хода | ПЭМ-1000 | - | 90 | 610 | - | 200 | 1480 | |
| напора | ПЭМ-400 | - | 42 | 375 | - | 112 | 1480 | |
| возбудитель | МП-542-1/2 | - | 12 | 115 | - | 104 | 1480 | |
| Двигатель: | ||||||||
| приводной (сетевой) | АЭ-113-4 | 214 | 250 | 6000 | - | 59 | 1480 | |
| подъема | ДПЭ-82 | 159 | 174 | 460 | - | 410 | 740 | |
| поворота | ДПВ-52 | 45 | 55 | 305 | - | 220 | 1200 | |
| напора | ДПЭ-52 | 48 | 54 | 395 | - | 150 | 1200 | |
| хода | ДПЭ-52 | - | 54 | 395 | - | 150 | 1200 | |
| открывания днища ковша | ДПЭ-12 | - | 3,6 | 110 | - | 42 | 1430 | |
| Двигатель (вспомогательных механизмов) | ||||||||
| вентилятора подъема | 4А100S4 | - | 3 | 380 | 0,83 | 6,7 | 1435 | |
| вентилятора напора | 4А80М4 | - | 1,1 | 380 | 0,81 | 2,7 | 1420 | |
| вентилятора поворота | 4А80М4 | - | 1,1 | 380 | 0,81 | 2,7 | 1420 | |
| вентилятора кузова | 4А71В4 | - | 0,75 | 380 | 0,73 | 2,1 | 1390 | |
| компрессора | 4А112М4 | - | 5,5 | 380 | 0,85 | 12 | 1445 | |
| гидросистемы | 4А90L4 | - | 2,2 | 380 | 0,83 | 5 | 1425 | |
2.6 Выбор передвижного приключательного пункта
Для подключения экскаватора, а также защиты от падения напряжения в сети, короткого замыкания и однофазного замыкания используется передвижная приключательный пункт, выполняемый КРУ тип ЯКНО-6ЭП.

Рис. 7 Комплектное распределительное устройство ЯКНО-6ЭП
1 – опорно-штыревые изоляторы; 2 – изоляторы проходки; 3 – предохранители; 4 – трансформатор напряжения; 5 – привод; 6 – корпус ячейки; 7 – рама; 8 – разъединитель; 9 – масляный выключатель; 10 – привод пружинный; 11 – трансформатор тока; 12 – трансформатор тока нулевой последовательности; 13 – салазки.
Выбор КРУ на 6 кВ для защиты сетевого двигателя экскаватора от токов короткого замыкания которое одновременно могло служить и приключательным пунктом экскаватора. Выбрать также ток установки максимальной защиты КРУ. Выдержка времени защиты tзащ=0. Данные для выбора КРУ и его токовой защиты: приводной двигатель – асинхронный трехфазного тока с коротко замкнутым ротором АЭ-113-4. Мощность 250 кВт, напряжение 6000/3000 В, ηн.дв = 0,92, cosφн.дв = 0,91, кратность пускового тока к номинальному – 5. Кроме того, для питания вспомогательного электрооборудования на ЭКГ-4,6 установлен силовой трансформатор ТМЭ-30/6 мощностью 30 кВ·А, напряжением 6000/3000/220 В.
При нормальной работе экскаватора ток в высоковольтном кабеле будет

 А
А
По номинальным параметрам предварительно выбираем КРУ типа ЯКНО-6ЭР с ручным приводом ПРБА-113 на ток Iном =50 А, Uн = 6 кВ с Iамп = 51 кА, Iоткл = 20 кА, Sоткл = 150000 кВ·А.

Таким образом, принятый приключательный пункт ЯКНО-6ЭР на ток Iн =50 А устойчив по отношению к токам короткого замыкания. Определяем требуемый ток установки максимальных токовых реле мгновенного действия РТМ-1, встроенных в привод ПРБА-113 приключательного пункта ЯКНО-6ЭР.
2.7 Выбор коммутационного оборудования и кабелей
Выбор коммутационного оборудования производиться в соответствии с электрической схемой ЯКНО.

Рис. 8 Электрическая схема ЯКНО.
2.7.1 Выбор масляного выключателя и разъединителей
Условия выбора:
Uн≥Uуст
Iн ≥ Iрасч
IР = 32 А
Выбираем выключатель масляный типа ВМП
Uн=10 кВ
Iн=630 А и разрядник типа РВЗ-6/400
Uн=6 кВ
Iн=400 А
2.7.2 Выбор трансформатора тока и трансформатора напряжения
А) Трансформатор тока выбираются по условию
Uн≥Uуст
I1н ≥ Iрасч
I2н = 5А
по классу точности и проверяются по вторичной нагрузке.
Так как к трансформаторам тока подключаются только амперметр и релейная защита, то класс точности можно принять равное 1.
IР = 32 А Выбираем трансформатор тока типа ТПЛ-10
I1н = 50 А
I2н = 5А
Z = 0,6 Ом
Б) Трасформатор напряжения выбирается по условию
U1н≥Uуст
U2н= 100 В и проверяются по вторичной нагрузке
S2н ≥ S2
Выбираем трансформатор напряжения типа НТМИ-6-66
U1н= 6 кВ
S2н= 75 ВА
2.7.3 Выбор силового кабеля
Выбираем силовой кабил исходя из расчетного тока:
iР = 32 А.
Принимаем кабель марки КШВГ-3 × 16 + 1 × 6 с допустимым током 90 А.
2.8 Расчет прожекторного освещения
Согласно ПТЭ при работе в ночное время на территории карьера должны быть освещены места работ машин и механизмов, передвижные подстанции, переключательные пункты, лестничные спуски и пути хождения людей, отвалы и вся территория в районе ведения работ. На карьере применяется комбинированная система освещения:
Общее освещение выполняется передвижными прожекторными установками, которые устанавливаются на бортах карьера;
Местное освещение обеспечивает требуемый уровень освещенности на местах работ буровых станков, экскаваторов и выполняется комплектно с этими установками.
Расчёт прожекторного освещения.
Согласно "норм освещенности" наименьшая освещённость составляет:
Ен = 10 лк
Определяем суммарный световой поток прожекторов:

где S – площадь освещения участка карьера, м2
Кз – коэффициент запаса, учитывающий потери света от загрязнения защитного стекла и лампы; для карьера
Кз = 1,5
Kп – коэффициент запаса учитывающий потери света в зависимости от конфигураций освещаемой площадки, для карьеров Кп = 1,5
 лм
лм
Производим выбор прожектора с лампами накаливания для установки.
Максимальная осевая сила прожекторов:
Imax=50000 кандел
Световая отдача пржектора
 =27%
=27%
световой поток
Фл=8100 лм
Определяем число прожекторов:
 шт.
шт.
Высота установки прожекторов составит:


Установленную мощность ламп прожекторов карьера:
 кВт
кВт
 кВт
кВт
3. Ремонт поворотной платформы
3.1 Поворотная платформа

Рис.9 Вид сверху на поворотную платформу с механизмами
1 – подъемная лебедка; 2 – поворотный механизм; 3 – распределительное устройство высокого напряжения; 4 – силовой трансформатор; 5 – преобразовательный агрегат; 6 – сетевой приводной асинхронный электродвигатель; 7 – генератор подъема; 8 – генератор поворота хода; 9 – генератор напора; 10 – возбудитель; 11 – панель управления; 12 – пульт машиниста; 13 – 15 – командоконтроллеры, подъема и поворота.
3.2 Карта технологии ремонта редуктора поворота
Для качественного выполнения ремонта редуктора поворотной тележки экскаватора ЭКГ-4,6 целесообразно составить технологическую карту, отражающую четкую последовательность проведения ремонта.
| №п-п | Содержание работ | Технические условия | Замечание по ТБ и противопожарной безопасности | |
| 1 | Экскаватор установить на ровной площадке. | Бульдозер | При работе бульдозера экскаватор должен быть неподвижен. | |
| 2 | Отвернуть гайки снять краном люк на крыше кузова над поворотным редуктором, убрать на землю. | Кран груз. 10 т, стропы груз. 1-4 т, длинной 2-4 м. | Кран установить со стороны гусеничной ленты напротив поворотного редуктора. | |
| 3 | Снять кожух и разъемный фланец с вал-шестерени – 12, -13. | Ключи 17*19, монтажка, лом. | ||
| 4 | Отсоединить пневматический шланг с цилиндра тормоза. |
| При подъеме двигателя не находиться между двигателем и боковой стенкой кузова. | |
| 5 | Отвернуть шпильки крепления двигателя поворотного редуктора. |
| ||
| 6 | Застопорить двигатель за верхние проушины страховочной веревкой со стороны подъемного редуктора. Двигатель придержив. При выходе из посадочного места, не ударить по боковой стенке кузова. | Ключ 36х41, 32х36. Веревочная оттяжка длинной 2-6 м, строп груза. 4 т, длинной 2-4 м. | Работать согласно приложения к тех. Карте №2,3, работать должны не менее 4 человек. | |
| Уложить двигатель на землю таким образом, чтобы трубка для смазки нижнего подшипника была сверху или с боку. Вес 2495 кг. |
| |||
| 7 | Отвернуть болты крепления крышки редуктора. Застропить крышку за специальные отливы, краном сделать натяжку и легкими ударами по крышке кувалдой снять с подшипника 3622. Придерживая страхующей веревкой от резкого смещения отложить в сторону боковой стенки, вес крышки 400 кг. | Строп груз. 1,15 т, кувалда, оттяжка веревочная 1-6 м, кран груз. 10 т, длина стрелы 12м. | Работать согласно приложения к тех карте №2,3. Работать должны не менее 4 чел. Не находиться между редуктором и боковой стенкой кузова. | |
| 8 | Слить масло с редуктора, отвернуть болты крепления боковых крышек редуктора 10 болтов М12, снять колпак с зубчатого колеса – 70, - 12, расшплинтовать и отвернуть гайку вертикально – поворотного вала - 12, -30. | Емкость под масло, ключ 14х17, 12х14, зубило, молоток, кувалда, монтажка. | Убрать ненужный инструмент работать согласно приложений к тех. карте №3. | |
| 9 | Завернуть рым болты в зубчатое колесо – 70, - 12, краном поднять до упора в зубчатое колесо – 103, -8 подложить под зубчатое колесо – 70, -12 ломик или монтажку чтобы оно не опустилось. Ослабить стороны, завернуть рым болт в вал-шестерню -14, -12 сделать натяжку стропа и легкими ударами по зубчатому колесу груз 103 вывести подшипник 3626 из гнезда. Убрать зубчатое колесо -103, -8 в сборе с вал-шестерней -14,-12 | Строп груз 1-2 т, ломик, монтажка, кувалда, оттяжка, рым-болты | Поднять шестерни над редуктором поддержать их, чтобы стекли остатки масла. | |
| 10 | За рым-болты краном снять со шлицов колесо -70, -12 м. | Работать согласно приложений к тех картам №2,3 | ||
| 11 | Расшплинтовать и вывернуть болты крепления стакана главного вала -12, -30, 8 болтов М30х100. | Болт М30 с нарезкой резьбы на все длину, Строп груз 2т, длина 1,5 м. |
| |
| 12 | Закрепить лабиринтное кольцо к стакану, навернуть гайку с отверстиями под рым-болт в творец – 12, -30 и краном вытащить из посадочных мест поворотной платформы. Все главного вала в сворке 1516 кг. |
| ||
| 13 | При замене -14, -12,- 103,-8,30,-70,12, разбирать главный вал не следует. |
| ||
| 14 | При установки главного вала – 12, -30 нужно в нижнем распорном кольце подшипника 3644 завернуть 4 болт М10 и зажать наружную обойму подшипника 3644 с одинаковым зазором по всему диаметру вала, проверить крепления лабиринтного кольца к станку. | 4 болт М10, кляч гаечный 14х17. | Не находится под грузом. | |
| 15 | Краном опускать главный вал в сборе в посадочное место подшипника №3644 строго вертикально. Совместить зубья главного вала -12,-30, с зубьями 144, -30 и отверстия верхнего стакана с резьбой, в корпусе редуктора. Если под собственным весом вал, опускается, то следует завернуть шпильки со сплошной резьбой, вместо | Гайка с резьбой под рым-болт или рым болта Шпильки М30, длинной 400 мм – 2 шт. Ключ 41х46, монтажка подкладка прут стальной или лом длинной 600-1400 мм. | Работать согласованно в индивидуальных средствах защиты, согласно приложений к тех картам №2,3. Работу должны выполнять не менее 4-х человек.
| |
| крепежных болтов и помогая выравнивать стакан кувалдой посадить на место главный вал. Под фланец стакана положить прокладку. Сверху на стакан установить уплотнительное лабиринтное кольцо с уплотнительными резиновыми кольцами или установит их на ступице – 70, -12. Закрепить верхний стакан главного вала, вывернуть из распорного кольца подшипника №3644, регулировочные болты. Краном установить – 70, -12, на шлицы, подложить под нее монтажку, чтобы зазор между гнездом подшипника №3626 и -70 не менее 120 мм. Застопорить за рым болт – 14, 103, краном и подвести подшипник 3626 к посадочному гнезду. | Молоток, наставка уплотнительные резиновые кольца диаметром 16-18 мм. | Обеспечить надежное освещение гнезда подшипника 3626. | ||
| 16 | Поправлять наружную обойму молотком, посалить на место подшипник вместе с -14, т-12. Застопорить – 70, -12краном сделать небольшую натяжку и убрать из-под нее прокладку. Опустить на место -70, -12, гайку навернуть, зашплинтовать гайку вертикально поворотного вала, поставить колпак, закрепить. |
| ||
| 17 | Убрать крышку подшипника №3622 из крышки редуктора. Установить вертикально -14, -12. Совместить крепежные отверстия и закрепить крышку подшипника №3622. | Ключи 24х27, молоток, надставка. | Не становиться на крышку редуктора, работать в очках. Не находиться между редуктором и боковой стенкой кузова. | |
| 18 | Застопорить эл. двигатель строго вертикально, краном подвести к посадочному месту в крышке редуктора. Веревочный оттяжкой со стороны подъемного редуктора совместить зубья -23, -103, посадочное место двигателя в крышке редуктора и крепежные отверстия. Краном опустить двигатель и завернуть шрильки М30. | Веревочная оттяжка, направляющая, монтажка. |
| |
| 19 | Соединить цилиндр тормоза с пневмосистемой. Соединить систему смазки редуктора. Установить нижние полуфланцы на -12, -30 и кожух.. |
| ||
| 20 | Краном установить люк над поворотным редуктором закрепить. Очистить площадку от металлолома. | Монтажка, ключ 17х19. |
| |
3.3 Послеремонтные испытания
Испытание при ремонте имеют целью установит качество ремонта. При испытание проверяют безотказность работы отдельных механизмов и агрегатов экскаватора. Испытание подразделяются – вхолостую и под нагрузкой.
При испытании экскаватора вхолостую проверяют правильность сборки, нормальную работу и взаимодействие всех механизмов и систем управления экскаватором. Кроме того, при холостой работе механизмов происходит некоторая взаимная приработка деталей.
У двигателя проверяется отсутствие ненормального шума и нагрева подшипников, работа пусковой и регулирующий аппаратуры и т.д.
В механизме подъема проверяется легкость включения фрикционных муфт, работа тормозов, чувствительность управления.
У зубчатых передач всех механизмов проверяется правильность зацепления.
В механизме напора проверяется легкость хода рукояти в седловых подшипниках, работа тормоза напорного механизма, равномерность нагрузки на кремальерные рейки обеих балок рукояти.
При испытания механизма поворота проверяется способность поворотной платформы вращаться по инерции после выключения поворотного двигателя. Быстрая остановка платформы явиться следствием неправильной работы опорных катков, заедания центральной цапфы, вертикально-поворотного вала во втулке и других деталей. Продолжительность испытания в холостую обычно 2-3 часа. После работы экскаватора вхолостую он останавливается и производиться тщательный его осмотр, проверка крепления станин редукторов, подшипников и других узлов.
После устранения всех замеченных неполадок экскаватор вновь включается в холостую работу на 25-30 минут. При этом особо проверяется работа деталей и механизмов, у которых было обнаружены недостатки.
При испытаниях под нагрузкой происходит более интенсивная, но тщательно контролируемая приработка деталей друг к другу.
Экскаваторы испытывают под нагрузкой при работе ковшом, загруженным балластом, или при работе в забое.
При испытании механизма поворота, экскаватор устанавливается на горизонтальной площадке, рукоять с груженным ковшом выдвигается в среднее положение. После этого производится несколько поворотов поворотной платформы на 250-300 градусов в обе стороны. При этом проверяются легкость вращения поворотной платформы, плотность прилегания опорно-поворотных катков к кольцевому рельсы по всему кругу катания.
В механизме напора проверяются правильность закрепления кремальных шестерен с рейками на всем ходу рукояти, легкость и плавность движения рукояти. Во время испытания наблюдают за правильностью смазки в подшипники, ее вытекания и разбрызгиванием.
Во время испытания экскаватора под нагрузкой проверяют температуру всех подшипников и работу электрооборудования (нагрев двигателей, искрение щеток и т.д.).
4. Экономическая часть
|
|
|
