 |


Принцип работы и структурная схема ГАС
|
|
|
|
Вопросы: 1. Состав и структурная схема ГАС.
2. Генераторное устройство.
3. Приемное устройство.
1. Состав и структурная схема ГАС.
В ГАС может быть реализована как аналоговая, так и цифровая обработка гидроакустических сигналов.
При аналоговой обработке гидроакустических сигналов может производиться временная селекция — выделение сигналов только в заданные промежутки времени, частотный (спектральный) анализ — выявление особенностей спектра в широкой или узкой полосе частот, а также выявление связи между спектрами сигналов, обработка сигналов с выявлением взаимосвязи между ними в различные моменты времени (корреляционный анализ) и статистический анализ, определяющий характер распределения амплитуд и фаз за определенный промежуток времени.
На рис. 1 представлена структурная схема ГАС с аналоговой обработкой гидроакустических сигналов.

Рис. 1. Структурная схема ГЛС
В состав ГЛС обычно входят следующие устройства.
1. Акустическая антенна (АА) предназначена для преобразования электрической энергии в акустическую и обратно.
2. Входные устройства служат для предварительного усиления принятых сигналов, а также для коммутации акустической антенны с генераторным и приемным устройствами.
3. Генераторное устройство формирует импульсы излучения с заданными параметрами.
4. Приемные каналы тракта обнаружения решают задачи обнаружения подводных объектов и грубого определения их координат.
5. Каналы уточнения координат предназначены для точного определения координат подводных объектов с последующей выдачей их в системы управления оружием.
6. Системы полуавтоматического сопровождения целей позволяют осуществлять сопровождение целей в полуавтоматическом режиме с автоматическим съемом текущих координат.
|
|
|
7. Канал прослушивания дает возможность прослушивать принятые сигналы на слух для классификации гидроакустического контакта с целью..
8. Система индикации является выходным устройством и необходима для наглядного отображения полученной информации и съема данных о цели.
9. Система управления и синхронизации является связующим звеном между всеми устройствами и системами ГАС.
10. Встроенное учебно-тренировочное устройство (ВУТУ)
предназначено для отработки операторских навыков по имитируемой цели, а также умения по управлению ГАС в различных режимах.
11. Встроенная система автоматического контроля (ВСАК) позволяет контролировать основные технические параметры ГАС, выявлять ее неисправности.
ГАС включаются в работу путем подачи питающих напряжений на все устройства, для этого в станции имеется распределительный щит, на который выведены органы управления системой электропитания..
Процесс обнаружения целей с помощью ГАС осуществляется за счет чередования циклов излучения и приема. При излучении акустической энергии в водной среде формируется акустическое поле.
После завершение цикла излучения станция переключается в режим приема, при этом отраженные от объектов сигналы принимаются, обрабатываются и проявляются на выходных устройствах, что позволяет оператору зафиксировать наличие цели и в последующем определить координаты (дистанцию, пеленг, курсовой угол, угол места).
Определение дальности (дистанции до цели) является одним из наиболее важных измерений, выполняемых при гидролокации целей. Как известно, для определения дистанции наиболее широко применяется импульсный метод, основанный на использовании выражения:
Д=сt/2 (1)
где с —скорость звука в воде;
Д —дистанция до цели;
|
|
|
t — временная задержка эхо сигнала относительно момента излучения.
Скорость развертки на электронно-лучевой трубке индикатора пропорциональна скорости звука в воде. Если в ГАС используется индикатор со спиральной разверткой (рис. 2а), то скорость звука пропорциональна (равна с/2) радиальной скорости, т. е. скорости развертки вдоль радиуса (показано стрелкой).
При использовании двухкоординатного индикатора со строчной разверткой (рис. 2б) скорость звука пропорциональна скорости развертки по вертикали (показано стрелкой).

Рис. 2. Индикаторные устройства ГАС
Отсчет времени прохождения импульса излучения до объекта и отраженного сигнала обратно обеспечивается синхронизацией моментов начала излучения и начала развертки на экране индикатора.
Так как скорость развертки пропорциональна скорости распространения звука в воде, то положение отметки от цели на экране индикатора относительно начала развертки и определяет дистанцию до обнаруженного объекта.

Рис. 3 Схема, отражающая принцип определения дистанции до цели

Рис. 4. Функциональная схема приемных каналов тракта обнаружения
При пеленговании, т. е. определении направления на цель в ГАС реализуется пространственно-временная обработка сигнала, при этом в режимах обнаружения наиболее широко используется максимальный метод. Максимальный метод в конкретных ГАС может быть реализован различными способами. В частности, в ряде ГАС применен многоканальный приемник с использованием статической веерной характеристики направленности. При этом количество лепестков ХН равно числу каналов (рис. 4), т.е. в пеленговании участвуют п пространственных каналов, каждый из которых ориентирован на строго определенное направление. Сигнал, принятый с направления (например, первого), получает максимальное усиление соответственно в первом пространственном канале; сигнал, принятый со второго направления, — во втором и т. д. Выходы пространственных каналов поочередно с помощью электронного коммутатора подключаются к индикатору.
При использовании индикатора кругового обзора со спиральной разверткой начало и скорость обхода электронным коммутатором выходов пространственных каналов синхронизированы с началом и круговой скоростью развертки индикатора. В результате местоположение отметки от цели на экране индикатора соответствует номеру канала и направлению на цель (рис. 4).
|
|
|
Съем координат цели осуществляется либо системой механических визиров, либо с помощью электронного визира.
В первом случае оператор, пользуясь штурвалами «дистанция» и «пеленг», перемещает шкалы визиров по вертикали и горизонтали, подводит их под отметку от цели и по шкале снимает данные.
При наличии электронного съема оператор органами управления («дистанция» и «пеленг») совмещает метку электронного съема с отметкой от цели и по шкалам снимает данные.
Тракт обнаружения, как уже указывалось, позволяет определять координаты целей с точностью в пределах 3—5° по пеленгу и 3—5% от дистанции. Для более точного определения координат цели в ГАС используются для уточнения пеленга специальные каналы, в которых осуществлена пространственно-временная обработка сигнала, реализованная на фазовом или фазоамплитудном методе пеленгования, а для уточнения дистанции применяется регистратор (самописец).
Кроме того, данные по одной из целей в случае необходимости могут быть использованы для полуавтоматического сопровождения. Один из каналов уточнения координат имеет выход на канал прослушивания, что позволяет оператору осуществлять классификацию гидроакустического контакта с целью, т. е. определять принадлежность цели к тому или иному виду и классу целей.
2. Генераторное устройство.
Генераторное устройство предназначено для формирования импульса излучения с определенными параметрами:
f — частота,
τ — длительность,
Ра — мощность,
fп — частота повторения.
Каждый параметр формируется соответствующим устройством. Задающий генератор, как правило, кварцованный, непрерывно вырабатывает тональные гармонические колебания, частота которых, равна рабочей частоте ГАС. Напряжение рабочей частоты с задающего генератора поступает на ключевой каскад, выполняющий роль модулирующего устройства. Ключевая схема открывается на время, равное длительности импульса излучения, импульсом, выработанным схемой формирования длительности. С ключевой схемы сформированный по частоте и длительности сигнал поступает на устройство формирования характеристики направленности, в режиме направленного излучения, или прямо на усилители мощности, в режиме ненаправленного излучения.
|
|
|

Рис.5. Функциональная схема генераторного устройства ГАС.
Устройство формирования характеристики направленности при излучении представляет собой индукционный компенсатор излучения (рис.6,а), который позволяет осуществить необходимый фазовый сдвиг между импульсами излучения в целях формирования сканирующей характеристики направленности.
Так как чаще всего в ГАС применяются антенны цилиндрического типа, то для направленного излучения необходимо сдвигать фазы импульсов, подаваемые на различные преобразователи, т. е. формировать фазовые соотношения, характерные для линейной антенны.
При излучении линейной акустической антенной (рис.6,б) все импульсы в направлении излучения имеют одинаковую фазу, в то время как при ненаправленном излучении цилиндрической антенной импульсы в одном направлении имеют разные фазы. Излучать импульсы одной фазы в одном направлении с помощью цилиндрической акустической антенны можно, если произвести задержку импульсов, подаваемых на преобразователи 1, 2, 5, 6, на время, равное времени прохождения сигналом расстояний r1, r2, r3, r4.
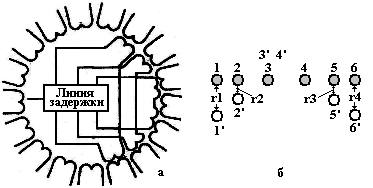
Рис. 6. Электрическая схема индукционного компенсатора излучения(а), принципа формирования ХН при излучении (б).
В индукционном компенсаторе для задержки импульсов по времени служит линия задержки, установленная в роторе. Импульсы с ключевой схемы поступают на линию задержки и далее на первичные обмотки индукционных трансформаторов, расположенные также в роторе компенсатора. Вторичные обмотки индукционных трансформаторов размещены на статоре. Со вторичных обмоток импульсы через усилитель мощности поступают на преобразователи акустической антенны, при этом для формирования одного лепестка характеристики направленности используется одна треть преобразователей, расположенных по кругу.
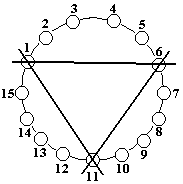 Индукционные трансформаторы фактически выполняют роль подвижных контактов, что в конечном счете позволяет не только формировать характеристику направленности, но и вращать ее в горизонтальной плоскости. Для сокращения общего времени излучения, что влияет на дальность мертвой зоны ГАС, чаще всего компенсатор используют для формирования трех лепестков характеристики направленности. Это осуществляется за счет параллельного подключения ко вторичным обмоткам индукционного трансформатора 7—12 и 13—18 преобразователей.
Индукционные трансформаторы фактически выполняют роль подвижных контактов, что в конечном счете позволяет не только формировать характеристику направленности, но и вращать ее в горизонтальной плоскости. Для сокращения общего времени излучения, что влияет на дальность мертвой зоны ГАС, чаще всего компенсатор используют для формирования трех лепестков характеристики направленности. Это осуществляется за счет параллельного подключения ко вторичным обмоткам индукционного трансформатора 7—12 и 13—18 преобразователей.
|
|
|
Усилители мощности предназначены для усиления импульсов, поступающих с устройства формирования характеристики направленности или с ключевой схемы. Они могут быть выполнены в ламповом или тиристорном варианте. В ламповом варианте используются несколько ступеней усиления.
В отдельных реальных схемах для еще большего усиления в одно плечо может быть включено несколько одинаковых ламп. Главным недостатком ламповых схем является их сравнительно невысокая эксплуатационная надежность. Поэтому в последние годы широко стали применяться усилители мощности на тиристорах.
Таким образом, усиленный в усилителе мощности сформированный акустический сигнал (импульс излучения) с заданными параметрами поступает на преобразователи акустической антенны.
3. Приемная часть тракта обнаружения
Приемная часть тракта обнаружения позволяет осуществлять обнаружение, классификацию и грубое определение координат цели. По этим данным осуществляется наведение характеристики направленности приемного канала уточнения координат.
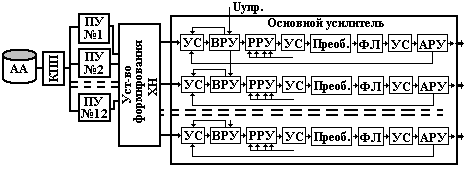
Рис. 7.Функциональная схема приемной части тракта обнаружения.
Отраженный от цели акустический сигнал достигает акустической антенны ГАС, преобразуется в электрический и через коммутационное устройство поступает на предварительные усилители (ПУ). Предварительные усилители предназначены для начального усиления сигналов и предварительной фильтрации.
В состав каждого ПУ (рис. 8) входят усилители, фильтр, фазовращатели и согласующий каскад.

Рис. 8. Функциональная схема предварительного усилителя
Фазовращатель служит для выравнивания фаз всех предварительных усилителей. Согласующий каскад необходим для согласования выхода предварительного усилителя со входом устройства формирования характеристики направленности. На время излучения коммутатором приема — передачи входы всех ПУ отключаются. При настройке ПУ регулируются фаза и коэффициент усиления с таким расчетом, чтобы параметры всех ПУ были идентичны.
Устройство формирования характеристики направленности (рис.8,б) позволяет реализовать максимальный (амплитудный) метод пеленгования и представляет собой набор линий задержки. Принцип формирования стационарной веерной ХН заключается в компенсации разности фаз принятых сигналов, возникающих за счет кривизны акустической антенны (рис. 8,а).
Эта разность определяется следующим выражением:

где ∆ф — разность фаз принятых сигналов;
d — диаметр акустической антенны;
λ — длина волны.

Рис.9. Принцип возникновения разности фаз принимаемых сигналов (а) и устройство формирования веерной характеристики направленности (б).
Таким образом, сигналы, принятые с одного направления, на выходе акустических преобразователей будут иметь различные фазы, т. е. непосредственное использование АА такой конструкции не позволяет осуществлять направленный прием.
Возможность сформировать ХН в горизонтальной плоскости с помощью антенны цилиндрического типа возникает, если привести антенну или часть ее к линейной, для чего выходы предварительных усилителей, а следовательно, и преобразователи подключаются к линии задержки (рис. 8, б).
Подключение линии задержки к преобразователям АА осуществляется таким образом, что сигналы с 6 и 7 преобразователей поступают в начало линии задержки и задерживаются на время τ1, равное пробегу звуковой волны расстояния r1, соответственно сигналы с 5 и 8 — на τ2 и т. д.
Таким образом, на выходе линии задержки все сигналы суммируются в одной фазе и общий сигнал имеет максимальную амплитуду, т. е. так же, как это характерно и для линейной АА.
Сигналы, следующие с других направлений, суммируются с различными фазами, их амплитуда на выходе линии задержки в результате будет меньше максимальной, что позволяет говорить о направленном приеме. Для формирования стационарной веерной ХН используется несколько линий задержки, их число зависит от числа пространственных каналов в приемнике ГАС. Подключение преобразователей к линиям задержки аналогично, но для каждого лепестка ХН выбирается своя группа преобразователей. Так, для обеспечения направления № 1 (1-й пространственный канал) используют преобразователи с 1 по 12, направления № 2 —с 2.по 13 и т. д. С линии задержки сигналы поступают в основной усилитель, где осуществляется их временная обработка (усиление, преобразование, фильтрация, детектирование, интегрирование). Временная обработка сигнала, производится в целях извлечения необходимой информации о цели. Главное в этом процессе выделить полезный сигнал на фоне помех.
Основной усилитель (рис. 6) кроме каскадов усиления включает в себя временную регулировку усиления (ВРУ), ручную регулировку усиления (РРУ), автоматическую регулировку усиления (АРУ), преобразователь.
Временная регулировка усиления предназначена для борьбы с реверберационной помехой, и представляет, собой устройство, автоматически изменяющее коэффициент усиления приемника в функции времени.
Принцип работы схемы АРУ состоит в том, что в зависимости от уровня помех, воздействующих на входные усилители, изменяется коэффициент усиления тракта до такой величины, при кото рой уровень шумов на входе ЭЛТ на 10-20 дБ ниже порога ограничения.
На вход приемного тракта поступают сигналы от цели с амплитудой, изменяющейся в широких пределах. Если коэффициент усиления тракта установлен таким образом, что на экране ЭЛТ создается нормальная подсветка от сигнала, отраженного от цели, расположенной на значительном расстоянии, то сигнал, отраженный от цели с более близкого расстояния, будет ограничиваться вследствие нелинейности амплитудной характеристики приемного тракта. К тому же ограничен и динамический диапазон электронно-лучевой трубки индикатора. При отсутствии помехи такое ограничение существенно не влияет на работу ГАС, так как даже ограниченные сигналы будут видны на экране ЭЛТ.
При наличии помехи больше уровня ограничения сигналы на индикаторе просматриваться не будут, хотя на входе сигнал и превышает помеху. Для того чтобы сигнал был виден, необходимо уменьшить усиление таким образом, чтобы шумы на выходе усилителя стали ниже уровня ограничения.
При работе схемы АРУ сигнал на выходе канала уменьшается в меньшей степени, чем на его входе.
Выходы основных усилителей подключаются к индикатору через электронный коммутатор.
1. Электронный коммутатор.
Осуществляет последовательное подключение выходов основных усилителей к индикаторному устройству. Как правило, в состав коммутатора входят (рис. 9):
—управляющее устройство;
— схемы синхронизации и согласования;
— электронные ключи.

Рис.10. Структурная схема электронного коммутатора.
Поочередное подключение каналов к общей нагрузке производится электронными ключами. Последовательность и время подключения каналов определяются последовательностью управляющих импульсов, поступающих с управляющего устройства. Для согласования работы индикаторного устройства и коммутатора используются схемы синхронизации и управления.
Управляющее устройство представляет собой электронную схему, вырабатывающую последовательность импульсов, служащих для управления работой ключей. Последовательность работы управляющего устройства задает пересчетная схема, состоящая иэ ряда триггеров.
Первый триггер пересчетной схемы запускается положительными импульсами, которые вырабатываются схемой запуска из синусоидального напряжения. На выходе триггера стоит схема запуска, предназначенная для срабатывания последующего триггера. Числа вырабатываемых импульсов равно числу основных усилителей, т. е. числу пространственных каналов. После выработки необходимого числа импульсов схема возвращается в исходное состояние.
Выходные напряжения триггеров поступают на схемы совпадения, определяющие длительность каждого импульса, и через схемы управления и синхронизации на электронные ключи.
Электронные ключи служат для подключения каждого основного усилителя приемных каналов к общей нагрузке на время длительности импульса. Длительность импульса находится в пределах сотен микросекунд, в то время как длительность отраженного сигнала составляет сотни миллисекунд, таким образом, в течение длительности отраженного сигнала каждый основной усилитель (т. е. пространственный канал) оказывается подключенным к общей нагрузке несколько десятков раз.
В качестве общей нагрузки могут быть использованы различные схемы повторителей. Сигнал через электронный ключ и повторитель поступает на видеоусилитель индикатора. Для того чтобы сигнал каждого пространственного канала занимал на экране индикатора определенное и строго фиксированное место, развертка по каналам должна осуществляться синхронно и синфазно с переключением каналов. Для получения такой развертки необходимо иметь синусоидальное напряжение, синфазное циклу коммутации.
Для получения на экране индикатора линии кормы в электронном коммутаторе одной из схем совпадения формируется импульс кормы, который поступает в индикатор кругового обзора (ИКО).
2. Индикатор кругового обзора

Рис. 11. Функциональная схема индикаторного устройства ГАС
В ИКО применяются электронно-лучевые трубки с магнитным отклонением луча и электрической фокусировкой (рис. 10). Формирование спиральной развертки на экране ЭЛТ осуществляется вращающимся магнитным полем, которое образуется в результате подачи трехфазного напряжения развертки, промодулированного по пилообразному закону, на трехфазную отклоняющую систему.
Формируется напряжение развертки следующим образом. Последовательность прямоугольных импульсов из электронного коммутатора поступает в схему формирования опорного напряжения, где преобразуется в синусоидальное напряжение. В схеме в качестве нагрузки используется синусно-косинусный вращающийся трансформатор (СКВТ), включенный по схеме фазовращателя. Ротор СКВТ связан с валом курса корабля. Фаза напряжения, снимаемая с роторных обмоток СКВТ, зависит от курса корабля. Таким образом достигается независимость отметки от цели от курса своего корабля.
Сформированное напряжение поступает в генератор напряжения развертки, где модулируется по пилообразному закону, и затем на выходной каскад. В выходном каскаде происходит преобразование однофазного напряжения в трехфазное, усиление и подача на трехфазную отклоняющую систему ЭЛТ.
Формирование метки электронного съема производится по двум независимым каналам — дистанции и пеленга. Канал дистанции обеспечивает перемещение метки электронного съема в радиальном направлении на ЭЛТ, канал пеленга в круговом. В качестве опорного напряжения используется синусоидальное напряжение, образуемое в схеме формирования опорного напряжения.
Датчиками дистанции являются потенциометры, механически связанные со штурвалом «дистанция». Амплитуда напряжения, снимаемого с потенциометров, зависит от положения штурвала дистанции, т. е. пропорциональна дистанции.
Режим работы ЭЛТ выбран так, чтобы трубка запиралась и открывалась на время прохождения развертки ИКО и длительности импульса электронного съема, для этого используется импульс, подсветки, длительность этого импульса равна длительности развертки ИКО при отключенном электронном съеме либо длительности импульса электронного съема.
Приемные каналы уточнения координат (КУК)
В связи с тем что данные о цели, полученные с помощью тракта обнаружения, имеют недостаточную для эффективного применения оружия точность, в современных ГАС используются каналы уточнения. В ГАК совокупность КУК образуют тракт уточнения координат (ТУК), для общности все рассуждения будут вестись о ТУК. ТУК помимо получения более точных данных решает задачи обеспечения полуавтоматического сопровождения целей по дистанции и пеленгу, а также прослушивания эхо-сигналов.
В основу построения ТУК положен фазоамплитудный метод, который заключается в преобразовании разности фаз сигналов в напряжение, амплитуда которого пропорциональна этой разности (рис. 11).

Рис. 12. Структурная схема ТУК.
Характеристика направленности ТУК формируется с помощыю двухканального компенсатора,, который представляет собой индукционный коммутатор и две линии задержки. Коммутатор состоит из статора и ротора, на которых, размещены элементы коммутирующих трансформаторов. Коммутирующие трансформаторы предназначены для подключения сигналов с выходов предварительных усилителей к двум линиям задержки, компенсирующим фазовые сдвиги напряжений, возникающие из-за цилиндрической формы акустической антенны.
Такая конструкция позволяет не только сформировать характеристику направленности, но и вращать ее в горизонтальной плоскости. При этом электромеханический привод компенсатора связан со штурвалом «пеленг» тракта обнаружения. Поэтому, когда метка электронного съема подводится под метку от цели, автоматически характеристика направленности ТУК разворачивается в направлении на цель.
С двухканального компенсатора сигналы поступают в двухка-нальный усилитель, где производятся преобразования фазовых соотношений входных сигналов в амплитудные путем образования их векторной суммы. Двухкнальный усилитель включает в себя канал суммы и канал разности. Сигналы канала суммы и канала разности совместно используются для управления лучом индикатора отклонения пеленга.
Сигналы с канала суммы поступают на катушки вертикального отклонения, а с канала разности — на катушки горизонтального отклонения. В результате совместного отклонения луча на экране ЭЛТ высвечивается наклонная прямая линия. Если оператор развернет приемную характеристику направленности так, что цель будет находиться на оси ХН, то разностный сигнал будет равен пулю, а суммарный — максимуму и на экране индикатора в этом случае появится вертикальная прямая линия, свидетельствующая о точном направлении на цель.
Так же как и в приемных канала тракта обнаружения, в двух-канальном усилителе осуществляется временная регулировка усиления, ручная и автоматическая. Назначение и принципы построения аналогичны. С канала суммы сигналы поступают на усилитель прослушивания, где преобразуются и усиливаются для воспроизведения в громкоговорителе и головных телефонах.
Уточнение дистанции производится с помощыо самописца, который представляет собой электромеханический регистратор сигналов. Запись сигналов производится на электрохимической, бумаге с помощью контактного устройства.
3. Система управления и синхронизации
Гидролокационная станция состоит из большого числа
отдельных приборов, блоков, устройств и т. п. Каждый из них решает свою функциональную задачу. Взаимосвязь между отдельными приборами, блоками и устройствами, объединение их в функциональные построения (тракты, каналы), определение временных интервалов их работы осуществляет система управления и синхронизации.
Система решает следующие задачи:
— управление подачей питающих напряжений на приборы и блоки ГАС в зависимости от режима работы;
—синхронизацию циклов излучения и приема;
— синхронизацию начала развертки на индикаторах;
— синхронизацию работы схем временной регулировки усиления;
— управление режимами работы трактов;
— управление режимами работы синхронно-следящих систем;
— управление частотой излучаемого сигнала и частотной характеристикой приемного тракта.
Управление подачей питания на приборы и блоки станции осуществляется со специального прибора, на котором установлены отдельные переключатели, контролирующие и регулирующие устройства, позволяющие включать ГЛС в различные режимы работы. При этом переменные напряжения от бортовой сети или от специальных преобразователей поступают на выпрямительные устройства, расположенные в приборах и блоках станции, и далее на отдельные устройства, схемы, узлы, детали.
В ГЛС кроме переменных напряжений 380 В 50 Гц, 220 В 50 Гц от бортовой сети, предназначенных для питания электронных систем станции, также используются переменные напряжения 220 В 427 Гц, 40 В 427 Гц, 110 В 427 Гц, необходимые для питания электромеханических систем, следящих приводов, высоковольтных выпрямителей и т. д.
Для защиты обслуживающего персонала от поражения электрическим током в приборах и блоках предусмотрена система блокировок, которая обеспечивает отключение питающих напряжений при выдвижении блоков. Для защиты от коротких замыканий и перегрузок в приборах, потребителях имеются плавкие предохранители, о перегорании которых сигнализируют сигнальные лампочки, установленные на передних панелях. Питающие напряжения от бортовой сети поступают на щит питания, на передней панели которого выведены соответствующие переключатели и контрольно-измерительные приборы, позволяющие включать в работу различные приборы и устройства станции, а также контролировать величины питающих напряжений.
В каждом приборе, как правило, располагаются выпрямители, которые вырабатывают постоянные напряжения для обеспечения нормального функционирования электронных схем и отдельных устройств.
Сигналы управления и синхронизации вырабатываются в блоке датчиков и через блок управления подаются в блок формирования сигналов управления и синхронизации на отдельные схемы формирования импульсов запуска, импульсов управления коммутатором приема-передачи, а также импульсов управления временной регулировки усиления и синхронно-следящими системами и т. д.
Такое построение позволяет осуществить четкое взаимодействие между отдельными приборами, блоками и устройствами в различных режимах работы ГАС.
1.Назначение, решаемые задачи, приборный состав ГАС МГ-312.
2.Работа ГАС МГ-312 по структурной схеме.
1. Назначение, решаемые задачи, приборный состав ГАС МГ-312.
Гидролокационная станция позволяет определить как направление, так и дистанцию до цели. Устанавливется на кораблях проекта 61, 61М совместно со станцией сопровожнения и целеукзания МГ-311.
Дистанция до цели определяется измерением интервала времени между моментом излучения в воду импульса акустических колебаний и моментом приема эхо-сигнала.
Гидролокатор кругового обзора обеспечивает непрерывное наблюдение за подводными целями, определение пеленга, курсового угла и дистанции до цели и передачу их в станцию управления оружием МГ-311 и ПУСБ.

Рис.1 Размещение ГАС на корабле.
Состав и размещение приборов и блоков станции:
-пр.1 — приемо-излучающая система — расположена в шахте ПОУ (подъемо-опускаемого устройства), которое выдвигется из днища корабля при перед включением ГАС на излучение, расположено в районе полубака;
-пр.16 — переключатель «ПРИЕМ-ПЕРЕДЧА» — состоит из блока поляризаации и коммутатора,
расположен в гидроакустическом отсеке корабля;
-пр.2 — импульсный генератор — расположен в гидроакустическом отсеке корабля;
-пр-ры 8,8А — предврительные усилители 1-79 каналов, магнитный усилитель;
-пр.13А — емкостной коммутатор, в состав которого входит блок емкостного коммутатора и бл. генератора развертки;
-щеточный компенсатор;
-пр.4А — пульт кругового обзора, в который входят:
-бл. индиктораа кругового обзора;
-бл. управления;
-бл. усилителя кругового обзора;
-бл. усилителя слуховой системы;
расположен в гидроакустической рубке корабля;
-пр.7- рекордер (смописец) — тк же расположен в гидроакустической рубке корабля;
-пр.6 — выносной индикатор ГАС — расположен в БИПе корабля;
-головные телефоны, громкоговоритель — расположены в гидроакустической рубке корабля;
-ЗИП и техническая документация.
2.Работа ГАС МГ-312 по структурной схеме.
Принцип действия рассмотрим по структурной схеме, изображенной на (рис.2).

Рис.2. Структурная схема ГАС МГ-312.
Автономная работа станции в режиме излучения осуществляется следующим образом. Задающий релаксационный генератор индикатора кругового обзора (блок ИЭ) вырабатывает остроконечные импульсы с периодом повторения 10.8 или 5.4 с в зависимости от выбранной шкалы дальности 8000 или 4000 м. Эти импульсы запускают ждущий мультивибратор, на выходе которого образуется прямоугольный импульс длительностью 100 мс.
Прямоугольный импульс с выхода мультивибратора через катодный повторитель, служащий для исключения влияния последующих цепей на работу мультивибратора, поступает на генератор пилообразного напряжения и на запуск импульсного генератора. В импульсном генераторе вырабатывается импульс 50 или 25 мс, который через коммутационное устройство прибора 16 «прием – передача» поступает на акустическую систему.
Акустическая система преобразует электрические колебания в акустические. Она состоит из 81-й секции, каждая из которых включает два магнитострикционных преобразователя. Система ориентироваана таким образом, что 1- и 81-я секции направлены в сторону носа корабля. В режиме излучения секции соединяются таким образом, что акустический импульс в горизонтальной плоскости излучается по всем направлениям. В вертикальной плоскости излучение производится направленно. Блок поляризации служит для выработки напряжения, необходимого для поляризации преобразователей.
Одновременно с излучением импульса генератор пилообразного напряжения вырабатывает линейно-меняющееся напряжение, которое через усилитель постоянного тока поступает в блок емкостного (индуктивного) коммутатора на обмотки сельсинов БС405, которые вырабатывают напряжения спиральной развертки для индикатора кругового обзора (ИКО) и выносного индикатора кругового обзора (ВИКО). Таким образом, осуществляется согласование начала развертки на индикаторах кругового обзора с посылкой импульса. Кроме того, в момент посылки подается питание на электродвигатель рекордера, и его перо начинает движение слева направо синхронно с движением электронного пятна на экранах трубок. При совместной работе со станцией МГ-311 задающий релаксационный генератор синхронизирует ее управляющим импульсом. После прекращения посылки коммутационное устройство переключает акустическую систему из режима излучения в режим приема, т. е. отключает от нее импульсный генератор и подключает предварительный усилитель.
Принимаемый отраженный сигнал преобразуется в электрический импульс, который подается на входы предварительных усилителей. При этом первая секция подключается к пернвому усилителю, втрая – ко второму и так далее по порядку их следования. Всего в станции имеется 81предварительный усилитель (по числу секций акустичесокй системы). Предварительные усилители идентичны и предназначены для усиления отраженных сигналов до величины напряжения, обеспечивающего нормальную коммутацию и преобразование частоты сигнала в частоту 13,3 кГц. Выход каждого из усилителей соединяется с соответствующей пластиной статора емкостного коммутатора.Пластины статора и ротора коммутатора образуют переходные емкости, через которые любые группы из трех пластин статора могут быть подключены к задерживающей цепи. Группа из 30 секций статорных пластин изображает положение сектора из 30 секций акустической системы в пространстве по горизонту.
Задерживающие цепи служат для компенсации фазы, а следовательно, для формирования характеристики направленности в горизонтальной плоскости. При вращении ротора емкостного коммутатора осуществляется бесконтактное переключение усилительных каналов, подсоединяемых к задерживающий цепи, и секций приемной системы, в результате чего обеспечивается вращение характеристики направленности.
Приемная характеристика направленности делает один оборот за время, не превыщающее длительности посылки.
С выхода емкосного коммутатора напряжение сигнала частотой 13,3 кГц подается в усилитель кругового обзора. Входной каскад усилителя предназначен для согласования входа усилителя с выходом коммутатора.С выхода входного каскада через аттенюатор, дающий возможность менят
|
|
|
