 |


Моделирование системы управления с ПИ-регулятором
|
|
|
|
Практическая работа №4
Моделирование системы управления
С различными видами регуляторов
Теоретическое введение
Задачи моделирования
Моделирование технических объектов и систем проводится для того, чтобы определить свойства и характеристики проектируемых систем еще до их изготовления и при необходимости скорректировать, уточнить их структуру и параметры. Это позволяет получить проект работоспособной системы, которую не придется существенно дорабатывать тогда, когда она будет изготовлена. Таким образом, моделирование сокращает и удешевляет процесс проектирования и реализации систем и объектов.
Кроме того, на модели системы можно проверить ее поведение в таких условиях и режимах, для которых система не предназначена, с тем, чтобы знать, как она себя поведет и к каким последствиям это приведет. Очевидно, что такие эксперименты на реальной системе могут быть не только дороги, но и небезопасны, в то время как моделирование позволяет получить нужную информацию о процессе или системе без лишних затрат и, главное, без негативных последствий.
Программа VisSim предназначена для построения, исследования и оптимизации виртуальных моделей физических и технических объектов, в том числе и систем управления. VisSim это аббревиатура выражения Visual Simulator – визуальная, воспринимаемая зрением, среда и средство моделирования.
Программа VisSim, разработана и развивается компанией Visual Solutions (USA) [1]. Эта программа – мощное, удобное в использовании, компактное и эффективное средство моделирования физических и технических объектов, систем и их элементов.
Программа предоставляет человеку развитой графический интерфейс, используя который, исследователь создает модель из виртуальных элементов с некоторой степенью условности так же, как если бы он строил реальную систему из настоящих элементов. Это позволяет создавать, а затем исследовать и оптимизировать модели систем широкого диапазона сложности.
|
|
|
Моделирование системы управления с П-регулятором
Переходные процессы в пропорциональном регуляторе (П-регуляторе) описываются выражением:
 ,
,
где  - входное воздействие на регулятор, равное отклонению регулируемой величины от заданного значения;
- входное воздействие на регулятор, равное отклонению регулируемой величины от заданного значения;
 - воздействие регулятора на объект, направленное на ликвидацию отклонения регулируемой величины от заданного значения;
- воздействие регулятора на объект, направленное на ликвидацию отклонения регулируемой величины от заданного значения;
 - коэффициент передачи регулятора, является параметром настройки.
- коэффициент передачи регулятора, является параметром настройки.
Обобщенная структурная схема САУ с П-регулятором представлена на рисунке 1:
Рис.1
Типичный переходный процесс, получаемый при пропорциональном регулировании, представлен на рисунке 2:
Рис.2
Как видно из рисунка, в системе с П-регулятором обычно присутствует статическая ошибка регулирования. Чем большим выбран пропорциональный диапазон регулирования, тем большей будет величина статической ошибки. При малой величине пропорционального диапазона увеличивается время переходных процессов, и при некоторых условиях может возникнуть автоколебательный (незатухающий) процесс в контуре регулирования.
Путем выбора коэффициента передачи П-регулятора можно существенно уменьшить установившуюся ошибку регулирования, однако ее полное устранение не представляется возможным даже теоретически.
Моделирование системы управления с П-регулятором в среде Vissim можно произвести следующим образом (рис.3):
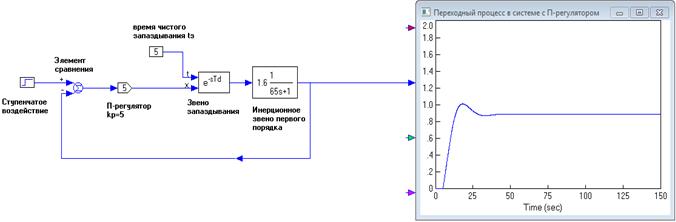
Рис.3
Моделирование системы управления с ПИ-регулятором
Статическую ошибку, возникающую при пропорциональном регулировании, можно исключить, если кроме пропорционального ввести еще и интегральное звено. Последнее образуется путем суммирования ошибки за определенный промежуток времени и формирования сигнала управления, пропорционального полученной величине.
|
|
|
Переходные процессы в пропорционально-интегральном регуляторе (ПИ-регуляторе) описываются выражением:
 ,
,
где  - коэффициент пропорциональности интегральной составляющей, а
- коэффициент пропорциональности интегральной составляющей, а  - время изодрома, параметр настройки ПИ-регулятора.
- время изодрома, параметр настройки ПИ-регулятора.
Если  , то даже при незначительных отклонениях регулируемой величины сигнал со временем может достичь любой величины, что приведет к перемещению регулирующего органа до момента, пока не станет равной 0.
, то даже при незначительных отклонениях регулируемой величины сигнал со временем может достичь любой величины, что приведет к перемещению регулирующего органа до момента, пока не станет равной 0.
Таким образом, ПИ-регулятор оказывает воздействие на регулирующий орган пропорционально отклонению и интегралу от отклонения регулируемой величины от задания.
Передаточная функция ПИ-регулятора имеет вид:
 .
.
Структурная схема идеального ПИ-регулятора представлена на рисунке 4:
Рис.4
Типичный переходный процесс, получаемый при пропорционально-интегральном регулировании, представлен на рисунке 5:
Рис.5
Как видно из рисунка 5, в ПИ-регуляторе при отклонении регулируемой величины от заданного значения мгновенно срабатывает пропорциональная (статическая) составляющая регулятора, а затем постепенно увеличивается интегральная (астатическая) составляющая регулятора.
Моделирование системы управления с ПИ-регулятором в среде Vissim можно произвести следующим образом (рис. 6):
Рис. 6
|
|
|
