Курсовая работа: Радиотехнические координаторы как элемент построения РЛС
Название: Радиотехнические координаторы как элемент построения РЛС Раздел: Рефераты по коммуникации и связи Тип: курсовая работа Добавлен 07:36:10 18 декабря 2010 Похожие работы Просмотров: 433 Комментариев: 2 Оценило: 0 человек Средний балл: 0 Оценка: неизвестно Скачать
ПЕРМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КУРСОВАЯ РАБОТА
по дисциплине: Основы построения РЛС
на тему: РАДИОТЕХНИЧЕСКИЕ КООРДИНАТОРЫ – КАК ЭЛЕМЕНТ ПОСТРОЕНИЯ РЛС
Подготовила:
студентка 2 курса Аэрокосмического факультета
по специальности
Авиационные приборы и
измерительно-вычислительные комплексы
Кравченко Валерия Игоревна
г. ПЕРМЬ 2009 г.
Содержание
Введение
1.Общие сведения о радиотехнических координаторах
1.1 Определение и классификация радиотехнических
координаторов
1.2 Способы измерения координат и методы пеленгования цели
- измерительная система координат
2. Радиотехнические координаторы с линейным сканированием
2.1 Обзор пространства
2.2. Принцип измерения координат
3. Радиотехнические координаторы с коническим сканированием
3.1 сущность метода конического сканирования и принцип измерения координат
3.2 Основные ошибки измерения углов и координат при коническом сканировании
3.3 Повышение точности измерения угловых координат
4.Моноимпульсные координаторы
4.1 Общие сведения о моноимпульсном методе измерения угловых
координат
4.2 Постулаты моноимпульсного метода.
4.3 Преимкщества и недостатки моноимпульсного метода.
4.4 Построение моноимпульсного координатора для пеленгования
в двух плоскостях
4.5 Особенности построения помехозащищенных моноимпульсных координаторов
4.6 Структурная схема РЛС сопровождения
5. Радиотехнические координаторы с непрерывным и
квазинепрерывным излучением
5.1 Общие сведения о координаторах с непрерывным излучением.
5.2 Преобразование сигнала одиночной цели
5.2.1 Цель не подвижная
5.2.2 Цель движется с малой скоростью
5.2.3. Цель движется с большой скоростью
5.3. Радиотехнические координаторы с квазинепрерывным
излучением (КНИ)
Заключение
Список литературы
Введение
Радиолокация – область радиотехники, обеспечивающая радиолокационное наблюдение различных объектов, то есть их обнаружение, измерение координат и параметров движения, а также выявление некоторых структурных или физических свойств путем использования отраженных или переизлученных объектами радиоволн либо их собственного радиоизлучения.
Информация, получаемая в процессе радиолокационного наблюдения, называется радиолокационной. Радиотехнические устройства радиолокационного наблюдения называются радиолокационными станциями (РЛС) или радиолокаторами. Сами же объекты радиолокационного наблюдения именуются радиолокационными целями или просто целями. При использовании отраженных радиоволн радиолокационными целями являются летательные аппараты (самолеты, вертолеты, метеорологические зонды и др.), гидрометеоры (дождь, снег, град, облака и т. д.), речные и морские суда, наземные объекты (строения, автомобили, самолеты в аэропортах и др.), всевозможные военные объекты и т.
Выделение полезной информации о цели обеспечиваются соответствующими радиотехническими устройствами - РЛС. Таким образом систему РЛС можно рассматривать как радиолокационный канал. Основными составными частями РЛС являются передатчик, приемник, антенное устройство, оконечное устройство.
Кроме обнаружения целей, РЛС решает задачу сопровождения цели, которая достигается за счет определения координат положения цели в пространстве и выдачи сигналов управления на перемещение антенны, тем самым обеспечивая постоянное отслеживание положения цели в меняющейся воздушной обстановке. Комплекс устройств обеспечивающий выработку сигналов управления антенной, измерение координат цели объединяются в устройство именуемое следящий координатор или радиотехнический координатор.
Развитие современной техники, сложность решаемых задач, высокие требования к надежности, простоте управления, оперативности, все это отразилось на построении РЛС.
В предлагаемой работе рассмотрена классификация существующих координаторов, принцип построения и решаемые задачи.
1.Общие сведения о радиотехнических координаторах
1.1 Определение и классификация радиотехнических координаторов
Радиотехнические координаторы (РТК) – это устройства обеспечивающие непрерывное и точное измерение координат цели (ракеты) и параметров их движения в заданной измерительной системе координат и являются неотъемлемым элементом построения радиолокационных станций (РЛС) обзора и сопровождения. Для решения задачи обнаружения и сопровождения целей в РТК используется ряд радиотехнических устройств (систем) работающих в комплексе и тесно взаимосвязанных между собой.
РТК классифицируются по следующим признакам (Рис.1):
- по числу измеряемых координат:
· Координаторы-локаторы измеряющие дальность rц, азимут βц и угол места ε ц (Рис. 2)
· Координаторы – пеленгаторы, измеряющие только угловые координаты
- по принципу локации:
· Обычные координаторы-локаторы с пассивным ответом, работающие только на прием
· Координаторы-локаторы с активным ответом, построенные по принципу радиозапрощиков (НРЗ)
· Активные, основная масса РЛС, использующих излучение собственных радиосигналов, прием и обработку отраженных радиосигналов от целей.
· Полуактивные, РТК использующие смешанный способ наведения (сопровождения): пассивный метод, используя чужой подсвет; активный метод – собственное излучение.
- по виду принимаемых и излучаемых сигналов:
· Импульсные
· С непрерывным излучением
- по способу измерения угловых координат
· Следящие, РТК у которых в процессе сопровождения цели ось координатора постоянно совмещена с целью. В этом случае различают координаторы двух типов:
а) со связанными осями
б) не связанными осями
Под осями понимаем ось координатора (ОК) и ось антенны (ОА), при этом у координаторов со связанными осями ОК и ОА постоянно совмещены. У координаторов с не связанными осями при сопровождении цели ОК совмещена с целью, а ОА постоянно подслеживает за ОК, чтобы цель не вышла за пределы сектора обзора.
Рис. 1
· С фиксированной осью. РТК у которых антенна устанавливается или стабилизируется в одном направлении и в процессе сопровождения цели неподвижна.
Недостатками таких координаторов является ограниченный угол обзора, определяемый шириной диаграммы направленности (ДН) антенны.
- по методу определения направления на объект:
· С линейным сканированием.
· С равносигнальной зоной.
По типу равносигнальной зоны (РСЗ) координаторы делятся на координаторы: с мгновенной РСЗ, с интегрированной РСЗ, с комбинированной РСЗ.
1.2 Способы измерения координат и методы пеленгования цели - измерительная система координат
Измерение координат цели осуществляется в системе координат связанной координатором. Считаем, что начало этой системы совпадает с антенной координатора (Рис. 2), при этом, как уже отмечалось, ось координатора может и не совпадать с осью антенны. Направление ОЦ соответствует дальности до цели rц , а угловые координаты измеряются либо в полярной, либо декартовой системе координат.
Рис. 2
В полярной системе координат измеряются углы: γ - угол между плоскостью XOY и XOЦ; φц –фазовый угол, угол между плоскостями ХОУ и ХОЦ.
В декартовой системе координат измеряются углы: βц - азимут, ε ц угол места.
- способы измерения угловых координат:
· Совмещение оси координатора (ОК) с линией визирования цели (ЛВЦ)
· Измерение угла между ОК (при жесткой фиксации оси координатора в заданном направлении) и ЛВЦ
- методы пеленгирования:
·Метод накопления пачек импульсов при линейном сканировании диаграммы направленности антенны (ДНА)
·Метод равно сигнальной зоны (РСЗ). Различают мгновенную РСЗ и интегральную РСЗ.
·Комбинированные методы (объединяют интегральный и мгновенный метод).
- основные характеристики и параметры координаторов, общие требования предъявляемые им
Различают понятие тактических и технических характеристик.
·Тактические характеристики: дальность действия, угловые размеры сектора обзора, время обзора, разрешающие способности по дальности, угловым координатам и скорости. Пропускная способность (число одновременно сопровождаемых целей и данные о них в единицу времени), помехозащищенность, надежность, нормативы технического обслуживания, климатические условия использования.
·Технические характеристики: длина волны, мощность излучаемого сигнала, вид излучаемого сигнала, форма и ширина ДНА, метод обзора и измерения дальности, угловых координат и скорости, частота повторения и длительность зондирующих импульсов, чувствительность приемника и его полоса пропускания, потребляемая станцией энергия, размеры и вес.
- требования к радиотехническим координаторам как системе измерения
· Точность и стабильность параметров. Под стабильностью параметров понимаем стабильность нуля пеленгационной характеристики (ПХ) (Рис.3а) и стабильность крутизны пеленгационной характеристики (Рис.3б).
Рис.3
Для координатора следящего типа наиболее важной характеристикой является стабильность нуля. Уход кривизны ПХ мало сказывается на точность измерения.
Для координатора же с фиксированной осью важны оба показателя, так как выходное напряжение угловых дискриминаторов этих координаторов непосредственно отражает угловые координаты.
Рис. 4
· Пеленгационная чувствительность (Рис.4), характеризует минимальный угол (βц min, ε ц min) отклонения цели от ОК, на который еще не реагирует угломер.
Она определяет ширину зоны нечувствительности εmin. Очевидно чем меньше εmin, тем точность измерения угловых координат выше.
· Линейность между выходом и измеренной величиной, обеспечивает требуемую точность в определении производных угловых координат и дальности.
· Непрерывность (периодичность) измерения координат.
От этого параметра зависит систематическая ошибка запаздывания, вызванная прерывистым (дискретностью) измерением координат.
· Возможность одновременного сопровождения и измерения координат нескольких целей.
· Возможность измерения координат одной (нескольких) выбранной цели и наблюдение всех целей.
· Диапазон измерения углов и расстояний.
2. Радиотехнические координаторы с линейным сканированием
2.1 Обзор пространства
Координаторы с линейным сканированием – это следящие координаторы с несвязанными осями. Для обзора пространства применяются две взаимно перпендикулярные ДНА (Рис.5), которые линейно сканируют в двух взаимно перпендикулярных плоскостях β и ε. Азимутальная диаграмма направленности имеет узкий раскрыв в пределах 1º и широкий раскрыв в пределах 20 º угломерной плоскости. Диаграмма сканирует с лева на право.
Угломестная ДН имеет аналогичные параметры, но в других плоскостях. Таким образом, осуществляется обзор пространства сканирующими диаграммами в пределах сектора сканирования, который ограничивается параметрами углов βск и εск. Сам сектор сканирования может быть подвижным, таким образом обеспечивая измерения угловых координат по азимуту от 0º до 360º, а по углу места от 0º до 90º. При сканировании ДН перемещается с угловой скоростью ωАβ и ωАε.
Рис. 5
Такой способ обзора пространства нашел применения в высотомерах и станциях секторного и кругового обзора.
В РТК с линейным сканированием используется система координат жестко связанная с сектором сканирования. Если скорость сканирования ωАβ =const, то время движения луча от одной границы к другой будет определятся соотношением T - время перемещения луча в азимутальной плоскости.
Закон изменения углового положения диаграммы направленности будет линейным, а следовательно и осуществляться линейное сканирование (Рис. 6)
Где Т- прямой ход луча,
Тобр – обратный ход луча,
Тск – время сканирования.
Отношение 1 , при этом 1 =(0,8-0,9).
Рис. 6
Во время обратного хода луча – луч возвращается в крайнее положение, при этом излучение так же не происходит.
2.2 Принцип измерения координат
При нахождении цели в секторе обзора, сигнал от цели будет приниматься только в момент прохождения ДНА через линию визирования цели (ЛВЦ). При том, что время нахождения цели в зоне луча, значительно превышает период следования импульсов, то отраженный сигнал от цели будет представлять собой пачку импульсов. Для измерения угловых координат достаточно измерить временной интервал tβц между началом сканирования луча и моментом нахождения энергетического центра пачки импульсов (Рис.7)
tβц = (2.1)
Для фиксации временных интервалов tβц в каждом периоде сканирования формируется опорный импульс βо (εо) для определения начала отсчета сектора сканирования.
Такой принцип измерения обладает рядом недостатков, связанных с ошибками измерения:
· Отраженный сигнал от цели придет с запозданием на время tзад, что приведет к ошибке измерения, вызванной сканированием антенны.
· Сами пачки импульсов одного и другого периода сканирования также будут отличаться за счет смещения цели.
Рис.7
3. Радиотехнические координаторы с коническим сканированием
3.1 Сущность метода конического сканирования и принцип измерения координат
Данные координаторы могут быть следящего типа и с фиксированной осью, причем ось антенны связана с осью координатора.
Рассмотрим ДНА игольчатого типа смещенной относительно оси антенны на угол скоса Δα. Затем диаграмму направленности антенны приведем во вращательное движение со скоростью Ωск. При этом в пространстве образуется окружность, конус вращения, через центр которого проходит РСН (Рис.8).
Рис.8
Если цель находится на РСН (Рис. 9), то принимаемые отраженные сигналы цели имеют одинаковую амплитуду и имеют запаздывание по отношению к зондирующим (излучаемым) импульсам равное tц. Исходя из этого дальность до цели можно определить
Dц = , (3.1)
где С – скорость света.
Рис. 9
Направление на цель определяется направлением равносигнального направления в азимутальной и угломестной плоскости.
В случае отклонения цели от равносигнального направления, принимаемые сигналы будут промодулированы частотой сканирования ДН Ωск, при этом в параметрах огибающей будет заложена информация о величине и направлении отклонения цели от РСН (Рис. 10). При этом глубина модуляции определяется как:
m= (3.2)
то есть
Ucо = Uc *cos(Ωск t- φ)(3.3)
Таким образом, глубина модуляции определяет амплитудой сигнала Uc, а направление отклонения от РСН - фазой φ.
Координатор цели с коническим сканированием при облучении цели модулирует сигнал дважды: при непосредственном облучении цели и при приеме отраженного сигнала. Такие координаторы принято называть с двухсторонней равносигнальной зоной.
Рис. 10
Структурная схема такого координатора представлена на рис. 11.
Рис.11
Мощные электромагнитные импульсы сформированные в передатчике (ПРД) поступают на раскрыв антенны, где формируется игольчатая ДН. При этом коническое вращение луча антенны достигается за счет вращения рупора антенны (щелевого вибратора, петли-согласования) модулятором (М). Задача модулятора обеспечить постоянною частоту сканирования Ωск.
Отраженный сигнал от цели поступает в приемник (ПРМ), где осуществляется усиление сигнала и преобразование (понижение) несущей частоты. Далее сигнал поступает в автомат дальности (АД) и в канал сигнала ошибки (КСО).
В канале выделения сигнала ошибки (КСО) выделяется огибающая Ucо. С выхода КСО сигнал поступает на два угловых дискриминатора УДβ и УДε, на второй вход которых поступает напряжение с генератора опорного напряжения (ГОН). При этом опорные напряжения сдвинуты друг относительно друга на 90º и жестко связаны с частотой вращения модулятора Ωск.
С выходов угловых дискриминаторов напряжение управления Uупрβ иUупрε в систему управления антенной СУАβ и СУАε, где осуществляется отработка этого напряжения и совмещения РСН с целью. При этом:
Uупрε =Ucо sin φ= Uc cos(Ωск t- φ) sin φ; (3.4)
Uупрβ =Ucо cos φ= Uc cos(Ωск t- φ) cos φ; (3.5)
3.2 Основные ошибки измерения углов и координат при коническом сканировании
- методические ошибки.
Они обусловлены двойной модуляцией сигналов цели при излучении и приеме вращающейся диаграммой направленности и конечной скоростью распространения радиоволн.
Рис. 12
На Рис.12 положение диаграммы направленности А –соответствует моменту излучения, Б – положение ДН в момент приема, В – результирующая ДН. Таким образом, за время равное tц (время распространения электромагнитной энергии до цели и обратно) диаграмма направленности повернется на угол Δφ≡
Временные развертки ДН (Рис.13) при передаче А, при приеме Б и результирующая В имеют разные фазы. Так как фаза опорного сигнала определяется фазой вращения ДНА на излучение (реальная ДН), а фаза огибающей сигнала ошибки определяется фазой вращения результирующей ДН, то возникает разность фаз между опорным напряжением Uоп и сигнала ошибки Ucо.
Рис. 13
Эта разность фаз и является методической ошибкой:
Δφм = Ωск Fск Fск (3.6)
tц =180º tц (3.7)
Таким образом, методическая ошибка в РТК с коническим сканированием воздействует на фазу сигнала ошибки и в следящих координаторах не оказывает существенного влияния на точность измерения углов координат, так как при взятии цели на автосопровождение (АС) РСН перемещается на цель.
В РТК с фиксированной осью эта ошибка приводит непосредственно к ошибкам измерения координат.
-ошибки за счет флюктуаций амплитуд принимаемых от цели сигналов
Флюктуация амплитуды принимаемых сигналов приводят к возникновению паразитной амплитудной модуляции, что вызывает паразитный сигнал ошибки.
Паразитная флюктуация возникает и тогда, когда цель находится на РСН. Ошибка эта случайна и среднеквадратическая ошибка определения углов координат вычисляется по формуле:
σεц = σβц = mэф (3.8)
где:
mэф –эффективная глубина модуляции вызванная флюктуациями,
Кmg –крутизна модуляционной характеристики,
Sm (Fcк) и Sm (0)–энергетическая спектральная плотность на частоте сканирования и нулевой частоте,
ΔFкц –полоса пропускания приемника угловой следящей системы,
ΔFn –эквивалент полосы помехи.
Соотношение и ΔFn определяется из графика (Рис.14):
Рис.14
3.3 Повышение точности измерения угловых координат
Для подавления паразитной амплитуды модуляции используют 2-х канальные координаторы с коническим сканированием (Рис.15). Антенной создаются две диаграммы направленности смещенные на угол Δα. При сканировании двух ДН принимаемый сигнал модулируется по амплитуде в противофазе. Паразитная амплитудная модуляция в обеих каналах будет в фазе.
Сигналы, принятые двумя ДН, можно записать как:
UI =E(1+x(t))]FI (Δα)[1+mI cos(Ωск t-φI)(3.9)
UII = E(1+x(t))]FII (Δα)[1-mII cos(Ωск t-φII)(3.10)
Где:
Е – средний уровень напряженности поля принимающей антенной волны,
x(t) – паразитная амплитудная модуляция,
mI и mII – коэффициент амплитудной модуляции.
Если mI = mII =m, а FI (Δα)= FII (Δα)= F(Δα) и φI = φII =φ, то после суммарно-разностной обработки получим – сигнал ошибки Ucо равный:
Рис.15
Ucо (t)= = m cos(Ωск t-φ)(3.11)
Таким образом, как видно из формулы, сигнал паразитной амплитудной модуляции отсутствует. Реализация этого принципа осуществлено в двухканальных радиотехнических координаторах с коническим сканированием с применением суммарно-разностной обработки сигнала.
Такая обработка сигнала позволяет вести борьбу не только с паразитной амплитудной модуляцией, но и с ответной угловой помехой, так как сигнал ответной угловой помехи будет приниматься в фазе.
Иногда такие координаторы называют координаторами с биконическим сканированием.
Функциональная схема такого координатора представлена на Рис.16.
Рис. 16
4.Моноимпульсные координаторы
4.1 Общие сведения о моноимпульсном методе измерения угловых координат
Моноимпульсный метод позволяет устранить ошибки в определении угловых координат возникающих за счет флюктуаций амплитуд сигнала. При этом методе используется сравнение амплитуды и фазы принимаемых одновременно сигналов с помощью многоканальной системы.
Дальность в моноимпульсных координаторах определяется как и в координаторах с коническим и линейным сканированием.
Основным отличием моноимпульсных координаторов является формирование равносигнальной зоны (РСЗ) неподвижными диаграммами направленности созданными антеннами моноимпульсных координаторов.
Зависимость сигналов принятых амплитудной и фазовой диаграммой направленности определяется формулой:
Fк (α)= = F(α) (4.1)
где,
Fк (α) – сигнал амплитудной ДН,
–сигнал фазовой ДН,
α –угол прихода радиоволн,
Ек1 (α) и Ек2 (0) –комплексная амплитуда сигнала принятого с направления α и максимума диаграммы направленности (α =0).
В зависимости от того какая из ДН используется при определении направления различают два основных вида моноимпульсных систем:
1) Система с амплитудной пеленгацией,
2) Система с фазовой пеленгацией.
Для осуществления амплитудной пеленгации в одной плоскости антенны моноимпульсных систем должны формировать две ДН развернутые друг относительно друга на угол 2Δα, гдеΔα –угол скоса (Рис.17)
Рис. 17
Характерной особенностью для сигнала принятого такой системой является неравенство амплитуд сигналов Е1 и Е2, при этом фазы сигналов равны ν1 (ε)=ν2 (ε).
Для пеленгации сигнала в двух плоскостях βи ε создаются четыре ДН по две в каждой плоскости.
Для получения фазовой пеленгации антенна такой моноимпульсной системы должна формировать две ДН максимумы, которых направлены параллельно и разнесены в пространстве на величину базы S (Рис.18).
Тогда при приеме сигнала появляется разность «схода» Ssinε, а запаздывание во времени δt= , в данном случае разность фаз определяется из формулы:
φ(ε)= ν1 (ε)-ν2 (ε)= ωо δt= δt= = Ssinε (4.2)
амплитуды сигналов при этом будут практически равны.
Рис. 18
Для фазового пеленгатора для измерения углов в 2-х плоскостях должны быть созданы 4-е ДН, при помощи четырех рефлекторов расположенных симметрично относительно оси антенны.
4.2 Постулаты моноимпульсного метода
Моноимпульсный метод определения координат базируется на трех постулатах, определяющих преимущества этого способа.
1) Угловая информация извлекается в виде отношения сигналов принятых различными ДН моноимпульсных антенн (Рис 19).
Рис. 19
a) Простое отношение (мультипликативное):
b)
rm (ε)= = = (4.3)
б) суммарно-разностное отношение (∑-Δ) (аддитивное):
ra (ε)= = = = , (4.4)
где
EK1 (ε) и EK2 (ε) –комплексная амплитуда сигнала принятая I и II антенной с направления ε.
EKΔ (ε) –комплексная амплитуда разностного сигнала, состоящего из сигнала EK1 иEK2 и является не четной симметричной функцией угла ε.
EK∑ (ε) –комплексная амплитуда суммарного сигнала EK1 иEK2, который является четной функцией угла прихода сигнала.
FKΔ (ε) –комплексная разностная ДН.
FK∑ (ε) –комплексная суммарная ДН.
ra (ε) и rm (ε) являются функциями только угла прихода волны и не зависят от абсолютного уровня принятого сигнала.
2) Измеряемое отношение принятых сигналов, при переходе от положительного угла к равному отрицательному меняется на обратное. Это требование верно относительно симметричных ДН моноимпульсной антенны.
3) Пеленгационная характеристика моноимпульсной системы является не четной действительной функцией угла прихода ε (Рис 20).
Рис. 20
Это означает, что пеленгационная характеристика должна указывать как на величину так и на знак угла прихода волны, то есть обладает не четной симметрией.
4.3.Преимкщества и недостатки моноимпульсного метода.
Преимущества:
1) Так как угловая информация выделяется в виде отношений сигналов, то точность измерения не зависит от амплитуды флюктуаций отраженных сигналов.
2) Выделение отношений принимаемых сигналов происходит в течении действия каждого импульса, то сесть информация о трех координатах извлекается при получении одного импульса от цели, а не за счет накопления информации от пачки импульсов.
3) Моноимпульсные координаторы защищены от угловых ответных помех, а также от непрерывных шумовых помех (за счет изменения амплитуды сигнала от импульса к импульсу).
4) В моноимпульсных системах отсутствуют методические ошибки по сравнению с координаторами линейного и конического сканирования. Кроме этого отношение принимаемых сигналов не зависит то скорости распространения радиоволн.
5) Дальность действия моноимпульсных координаторов превышает аналогичные по параметрам координаторы с линейным и коническим сканированием, за счет того, что линия излучения электромагнитной энергии совпадает с РСН антенн при приеме сигналов.
Недостатки:
1) Трудность создания симметрии при формировании суммарной и суммарно-разностных ДН.
2) Сложность обеспечения идентичности приема амплитудных и фазовых характеристик приемных систем
4.4 Построение моноимпульсного координатора для пеленгования в двух плоскостях
Моноимпульсные координаторы могут быть:
1) Трехканальные с четырьмя ДН.
2) Двухканальные с четырьмя ДН.
3) Двухканальные с двумя ДН.
Трехканальные моноимпульсные координаторы с четырьмя ДН для пеленгации в двух плоскостях (по азимуту и углу места) используют четыре ДН (Рис. 21).
Для определения азимута берется соотношение сигналов левых и правых ДН (ad и bc). Для определения угла места используется соотношение верхней и нижней пары ДН(ab и dc).
Для преобразования информации в суммарную и разностную используют четыре кольцевых моста (Рис.22).
Рис. 21
Излучение электромагнитной энергии осуществляется через все четыре ДН. Логика образования суммарного и разностного сигнала следующая:
- суммарный сигнал ∑ = a+b+c+d
- разностный Δε = (c+d)-(a+b) и Δβ = (a+d)-(b+c).
Рис. 22
Третий разностный сигнал, по диагонали (a+c)-(b+d) не используется и компенсируется нагрузкой.
Суммарный и разностный сигналы подаются на трехканальный суммарно-разностный угловой дискриминатор.
Двухканальные моноимпульсные координаторы с четырьмя ДН используют принцип сложения 2-х разностных каналов (Δε иΔβ) со сдвигом фазы одного из них на 90º. Такой сдвиг можно получить пропустив один из разностных каналов через дополнительную секцию, тем самым обеспечив больший путь прохождения разностного сигнала.
После общего усиления разностных сигналов в фазовых детекторах углового дискриминатора осуществляется разделение этих сигналов по плоскостям за счет того, что к одному из фазовых детекторов подается в фазе (Δβ) (Рис.23), а ко второму в противофазе со сдвигом на 90º (Δε).
Рис. 23
Недостатками такой системы является:
-жесткие требования к идентичности характеристик усилителей каналов
-при наличии паразитного сдвига между суммарным и общим разностным каналом, в каналах образуются паразитные сигналы (пролазы).
Двухканальные моноимпульсные координаторы с двумя ДН используют принцип поочередной запитки вращающимся волноводом или петлей связи соответствующей пары антенн с частотой вращения ГОН. Причем в одном из принятых разностных сигналов, для дальнейшей обработки, используют дополнительный сдвиг фазы на 90º.
4.5 Особенности построения помехозащищенных моноимпульсных координаторов
В большинстве случаев работа РЛС сопровождения осуществляется в сложной помеховой обстановке и прежде всего в условиях сильных пассивных помех. В этом случае для защиты используется режим СДЦ. Но в этом случае при обработке сигналов теряется информация об угловом положении цели.
Поэтому, возникает необходимость, для сохранения информации об угловом положении цели содержащуюся в амплитуде и фазе высокочастотного сигнала использовать амплитуду и фазу низкочастотной огибающей последовательности импульсов, которые на разрушаются при обработке в режиме СДЦ.
В этом случае моноимпульсные координаторы теряют одно из своих преимуществ – способность определения угловых координат по одному импульсу и приобретают свойства системы с интегральной равносигнальной зоной.
Для того, чтобы моноимпульсный координатор сохранил свое свойство – независимость от абсолютной амплитуды принимаемого сигнала, мгновенную пространственную равносигнальную зону преобразуют в две противофазных интегральных РСЗ, аналогичных как в радиотехнических координаторах с коническим сканированием.
Эта система называется моноконической системой. В ее составе (Рис.24) антенна формирующая четырех лепестковую ДН, суммарно-разностный преобразователь, на выходе которого имеем три канала: Δβ, Δεи∑. В дальнейшем происходит преобразование в 2-х канальную систему с одним разностным (Δcos(Ωt-φ)) и одним суммарным каналом (∑).
Общий разностный канал (Δcos(Ωt-φ)) получается при помощи круглого волновода, на который подаются два разностных сигнала (Δβ и Δε) в квадратуре:
Δ= (4.5)
Интенсивность поля в круглом волноводе (Рис. 25) характеризует величину отклонения цели от РСН. Фаза поля характеризует знак или направление отклонения цели от РСН:
(4.6)
Информация об угловом положении цели отбирается из круглого волновода при помощи модулятора, который вращается с угловой скоростью Ω.
Рис. 24
Характерным является то, что при переходе модулятором нулевого положения, фаза высокочастотного сигнала в нем меняется на противоположную. Нулевым положением считается положение, когда широкая стенка волновода совпадает с расположением электрических линий.
Рис. 25
Таким образом,на выходе модулятора образуются колебания (Рис. 26), которые можно описать выражением Δcos(Ωt-φ).
Рис. 26
При переходе через ноль фаза сигнала меняется. Суммарный и общий разностный сигнал подаются на сумматор в котором и формируются две противофазные интегральные зоны, которые можно записать в виде:
U1 (t) ≡∑+Δcos(Ωt-φ) = ∑(1+mcos(Ωt-φ)) 4.7)
U2 (t) ≡∑-Δcos(Ωt-φ) =∑(1 - mcos(Ωt-φ)) (4.8)
Где m глубина модуляции и может быть выражена как:
m= (4.9)
Таким образом, рассмотренная схема входного устройства (Рис. 24) угломера обеспечивает преобразование моноимпульсной информации об угловом положении цели в амплитуде и фазе высокочастотного сигнала в информацию содержащуюся в амплитуде и фазе низкочастотной огибающей сигналов.
4.6 Структурная схема РЛС сопровождения
Исходя из всего рассмотренного предлагается схема помехозащищенной, двухканальной моноимпульсной РЛС сопровождения (Рис. 27).
Рис. 27
Рассмотрим работу схемы РЛС сопровождения.
Непрерывный высококогерентный сигнал с генератора кварцевого ГК на частоте f0 -fпч поступает на преобразователь частоты (смеситель с полосовым фильтром на частоте f0), на второй вход которого поступают импульсы с генератора ПЧ с частотой заполнения fпч. Длительность и период повторения задается синхронизатором.
Работа преобразователя основана на работе пролетного клистрона (Рис. 28).
Рис. 28
С выхода преобразователя частоты импульсы на частоте f0 поступают на усилитель мощности, который открывается в соответствии с импульсами запуска передатчика ИЗП усиленными в модуляторе. Работа синхронизатора обеспечивает совпадение по времени открытие усилителя мощности импульсами ИЗП и импульсами с выхода преобразователя на частоте f0.
Мощные высокочастотные импульсы с выхода УМ поступают на антенный переключатель выполненный на основе феритового цыркулятора и далее на вход суммарного канала облучателя.
При сопровождении формирование ДН осуществляется суммированием однолепестковой суммарной ДН и двух лепестковых разностных ДН (β и ε) формируемых на выходах трехканального облучателя.
Сигнал суммарного канала ∑ через антенный переключатель поступает на один из входов сумматора, выполненного на базе феритового коммутатора, а сигналы разностных каналов Δβ, Δε поступают на модулятор, приэтом сигнал угломестного разностного сигнала проходит дополнительно через секцию фазирования j. Работа модулятора и сумматора была описана выше (Рис. 24).
С выхода сумматора сигналы U1 (t) и U2 (t), по двум независимым каналам поступают на балансные смесители (СМ I, СМ II). Следует еще раз обратить внимание, что каждый из этих сигналов содержит информацию о величине отклонения цели от РСН и знаке отклонения. Таким образом, достаточным условием для обеспечения сопровождения цели



 Рис. 1
· С фиксированной осью. РТК у которых антенна устанавливается или стабилизируется в одном направлении и в процессе сопровождения цели неподвижна.
Недостатками таких координаторов является ограниченный угол обзора, определяемый шириной диаграммы направленности (ДН) антенны.
- по методу определения направления на объект:
· С линейным сканированием.
· С равносигнальной зоной.
По типу равносигнальной зоны (РСЗ) координаторы делятся на координаторы: с мгновенной РСЗ, с интегрированной РСЗ, с комбинированной РСЗ.
1.2 Способы измерения координат и методы пеленгования цели - измерительная система координат
Измерение координат цели осуществляется в системе координат связанной координатором. Считаем, что начало этой системы совпадает с антенной координатора (Рис. 2), при этом, как уже отмечалось, ось координатора может и не совпадать с осью антенны. Направление ОЦ соответствует дальности до цели rц , а угловые координаты измеряются либо в полярной, либо декартовой системе координат.
Рис. 1
· С фиксированной осью. РТК у которых антенна устанавливается или стабилизируется в одном направлении и в процессе сопровождения цели неподвижна.
Недостатками таких координаторов является ограниченный угол обзора, определяемый шириной диаграммы направленности (ДН) антенны.
- по методу определения направления на объект:
· С линейным сканированием.
· С равносигнальной зоной.
По типу равносигнальной зоны (РСЗ) координаторы делятся на координаторы: с мгновенной РСЗ, с интегрированной РСЗ, с комбинированной РСЗ.
1.2 Способы измерения координат и методы пеленгования цели - измерительная система координат
Измерение координат цели осуществляется в системе координат связанной координатором. Считаем, что начало этой системы совпадает с антенной координатора (Рис. 2), при этом, как уже отмечалось, ось координатора может и не совпадать с осью антенны. Направление ОЦ соответствует дальности до цели rц , а угловые координаты измеряются либо в полярной, либо декартовой системе координат.
 Рис. 2
В полярной системе координат измеряются углы: γ - угол между плоскостью XOY и XOЦ; φ ц –фазовый угол, угол между плоскостями ХОУ и ХОЦ.
В декартовой системе координат измеряются углы: βц - азимут, ε ц угол места.
- способы измерения угловых координат:
· Совмещение оси координатора (ОК) с линией визирования цели (ЛВЦ)
· Измерение угла между ОК (при жесткой фиксации оси координатора в заданном направлении) и ЛВЦ
- методы пеленгирования:
·Метод накопления пачек импульсов при линейном сканировании диаграммы направленности антенны (ДНА)
·Метод равно сигнальной зоны (РСЗ). Различают мгновенную РСЗ и интегральную РСЗ.
·Комбинированные методы (объединяют интегральный и мгновенный метод).
- основные характеристики и параметры координаторов, общие требования предъявляемые им
Различают понятие тактических и технических характеристик.
·Тактические характеристики: дальность действия, угловые размеры сектора обзора, время обзора, разрешающие способности по дальности, угловым координатам и скорости. Пропускная способность (число одновременно сопровождаемых целей и данные о них в единицу времени), помехозащищенность, надежность, нормативы технического обслуживания, климатические условия использования.
·Технические характеристики: длина волны, мощность излучаемого сигнала, вид излучаемого сигнала, форма и ширина ДНА, метод обзора и измерения дальности, угловых координат и скорости, частота повторения и длительность зондирующих импульсов, чувствительность приемника и его полоса пропускания, потребляемая станцией энергия, размеры и вес.
- требования к радиотехническим координаторам как системе измерения
· Точность и стабильность параметров. Под стабильностью параметров понимаем стабильность нуля пеленгационной характеристики (ПХ) (Рис.3а) и стабильность крутизны пеленгационной характеристики (Рис.3б).
Рис. 2
В полярной системе координат измеряются углы: γ - угол между плоскостью XOY и XOЦ; φ ц –фазовый угол, угол между плоскостями ХОУ и ХОЦ.
В декартовой системе координат измеряются углы: βц - азимут, ε ц угол места.
- способы измерения угловых координат:
· Совмещение оси координатора (ОК) с линией визирования цели (ЛВЦ)
· Измерение угла между ОК (при жесткой фиксации оси координатора в заданном направлении) и ЛВЦ
- методы пеленгирования:
·Метод накопления пачек импульсов при линейном сканировании диаграммы направленности антенны (ДНА)
·Метод равно сигнальной зоны (РСЗ). Различают мгновенную РСЗ и интегральную РСЗ.
·Комбинированные методы (объединяют интегральный и мгновенный метод).
- основные характеристики и параметры координаторов, общие требования предъявляемые им
Различают понятие тактических и технических характеристик.
·Тактические характеристики: дальность действия, угловые размеры сектора обзора, время обзора, разрешающие способности по дальности, угловым координатам и скорости. Пропускная способность (число одновременно сопровождаемых целей и данные о них в единицу времени), помехозащищенность, надежность, нормативы технического обслуживания, климатические условия использования.
·Технические характеристики: длина волны, мощность излучаемого сигнала, вид излучаемого сигнала, форма и ширина ДНА, метод обзора и измерения дальности, угловых координат и скорости, частота повторения и длительность зондирующих импульсов, чувствительность приемника и его полоса пропускания, потребляемая станцией энергия, размеры и вес.
- требования к радиотехническим координаторам как системе измерения
· Точность и стабильность параметров. Под стабильностью параметров понимаем стабильность нуля пеленгационной характеристики (ПХ) (Рис.3а) и стабильность крутизны пеленгационной характеристики (Рис.3б).
 Рис.3
Для координатора следящего типа наиболее важной характеристикой является стабильность нуля. Уход кривизны ПХ мало сказывается на точность измерения.
Для координатора же с фиксированной осью важны оба показателя, так как выходное напряжение угловых дискриминаторов этих координаторов непосредственно отражает угловые координаты.
Рис.3
Для координатора следящего типа наиболее важной характеристикой является стабильность нуля. Уход кривизны ПХ мало сказывается на точность измерения.
Для координатора же с фиксированной осью важны оба показателя, так как выходное напряжение угловых дискриминаторов этих координаторов непосредственно отражает угловые координаты.
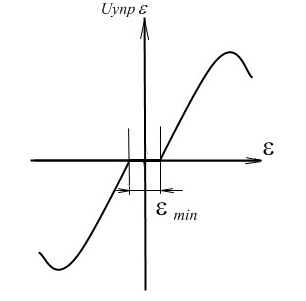 Рис. 4
· Пеленгационная чувствительность (Рис.4), характеризует минимальный угол (βц min, ε ц min) отклонения цели от ОК, на который еще не реагирует угломер.
Она определяет ширину зоны нечувствительности εmin. Очевидно чем меньше εmin, тем точность измерения угловых координат выше.
· Линейность между выходом и измеренной величиной, обеспечивает требуемую точность в определении производных угловых координат и дальности.
· Непрерывность (периодичность) измерения координат.
От этого параметра зависит систематическая ошибка запаздывания, вызванная прерывистым (дискретностью) измерением координат.
· Возможность одновременного сопровождения и измерения координат нескольких целей.
· Возможность измерения координат одной (нескольких) выбранной цели и наблюдение всех целей.
· Диапазон измерения углов и расстояний.
2. Радиотехнические координаторы с линейным сканированием
2.1 Обзор пространства
Координаторы с линейным сканированием – это следящие координаторы с несвязанными осями. Для обзора пространства применяются две взаимно перпендикулярные ДНА (Рис.5), которые линейно сканируют в двух взаимно перпендикулярных плоскостях β и ε. Азимутальная диаграмма направленности имеет узкий раскрыв в пределах 1º и широкий раскрыв в пределах 20 º угломерной плоскости. Диаграмма сканирует с лева на право.
Угломестная ДН имеет аналогичные параметры, но в других плоскостях. Таким образом, осуществляется обзор пространства сканирующими диаграммами в пределах сектора сканирования, который ограничивается параметрами углов β ск и ε ск. Сам сектор сканирования может быть подвижным, таким образом обеспечивая измерения угловых координат по азимуту от 0º до 360º, а по углу места от 0º до 90º. При сканировании ДН перемещается с угловой скоростью ωАβ и ωА ε.
Рис. 4
· Пеленгационная чувствительность (Рис.4), характеризует минимальный угол (βц min, ε ц min) отклонения цели от ОК, на который еще не реагирует угломер.
Она определяет ширину зоны нечувствительности εmin. Очевидно чем меньше εmin, тем точность измерения угловых координат выше.
· Линейность между выходом и измеренной величиной, обеспечивает требуемую точность в определении производных угловых координат и дальности.
· Непрерывность (периодичность) измерения координат.
От этого параметра зависит систематическая ошибка запаздывания, вызванная прерывистым (дискретностью) измерением координат.
· Возможность одновременного сопровождения и измерения координат нескольких целей.
· Возможность измерения координат одной (нескольких) выбранной цели и наблюдение всех целей.
· Диапазон измерения углов и расстояний.
2. Радиотехнические координаторы с линейным сканированием
2.1 Обзор пространства
Координаторы с линейным сканированием – это следящие координаторы с несвязанными осями. Для обзора пространства применяются две взаимно перпендикулярные ДНА (Рис.5), которые линейно сканируют в двух взаимно перпендикулярных плоскостях β и ε. Азимутальная диаграмма направленности имеет узкий раскрыв в пределах 1º и широкий раскрыв в пределах 20 º угломерной плоскости. Диаграмма сканирует с лева на право.
Угломестная ДН имеет аналогичные параметры, но в других плоскостях. Таким образом, осуществляется обзор пространства сканирующими диаграммами в пределах сектора сканирования, который ограничивается параметрами углов β ск и ε ск. Сам сектор сканирования может быть подвижным, таким образом обеспечивая измерения угловых координат по азимуту от 0º до 360º, а по углу места от 0º до 90º. При сканировании ДН перемещается с угловой скоростью ωАβ и ωА ε.
 Рис. 5
Такой способ обзора пространства нашел применения в высотомерах и станциях секторного и кругового обзора.
В РТК с линейным сканированием используется система координат жестко связанная с сектором сканирования. Если скорость сканирования ωАβ =const, то время движения луча от одной границы к другой будет определятся соотношением T
Рис. 5
Такой способ обзора пространства нашел применения в высотомерах и станциях секторного и кругового обзора.
В РТК с линейным сканированием используется система координат жестко связанная с сектором сканирования. Если скорость сканирования ωАβ =const, то время движения луча от одной границы к другой будет определятся соотношением T  - время перемещения луча в азимутальной плоскости.
Закон изменения углового положения диаграммы направленности будет линейным, а следовательно и осуществляться линейное сканирование (Рис. 6)
Где Т- прямой ход луча,
Тобр – обратный ход луча,
Тск – время сканирования.
Отношение
- время перемещения луча в азимутальной плоскости.
Закон изменения углового положения диаграммы направленности будет линейным, а следовательно и осуществляться линейное сканирование (Рис. 6)
Где Т- прямой ход луча,
Тобр – обратный ход луча,
Тск – время сканирования.
Отношение  1 , при этом
1 , при этом  1 =(0,8-0,9).
1 =(0,8-0,9).
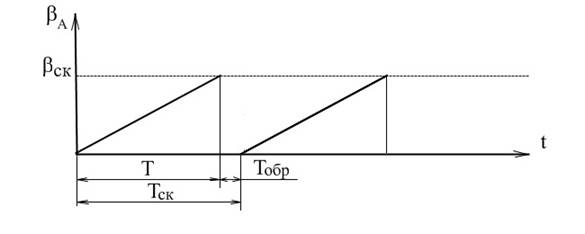 Рис. 6
Во время обратного хода луча – луч возвращается в крайнее положение, при этом излучение так же не происходит.
2.2 Принцип измерения координат
При нахождении цели в секторе обзора, сигнал от цели будет приниматься только в момент прохождения ДНА через линию визирования цели (ЛВЦ). При том, что время нахождения цели в зоне луча, значительно превышает период следования импульсов, то отраженный сигнал от цели будет представлять собой пачку импульсов. Для измерения угловых координат достаточно измерить временной интервал tβ ц между началом сканирования луча и моментом нахождения энергетического центра пачки импульсов (Рис.7)
tβ ц =
Рис. 6
Во время обратного хода луча – луч возвращается в крайнее положение, при этом излучение так же не происходит.
2.2 Принцип измерения координат
При нахождении цели в секторе обзора, сигнал от цели будет приниматься только в момент прохождения ДНА через линию визирования цели (ЛВЦ). При том, что время нахождения цели в зоне луча, значительно превышает период следования импульсов, то отраженный сигнал от цели будет представлять собой пачку импульсов. Для измерения угловых координат достаточно измерить временной интервал tβ ц между началом сканирования луча и моментом нахождения энергетического центра пачки импульсов (Рис.7)
tβ ц =  (2.1)
Для фиксации временных интервалов tβ ц в каждом периоде сканирования формируется опорный импульс βо (εо) для определения начала отсчета сектора сканирования.
Такой принцип измерения обладает рядом недостатков, связанных с ошибками измерения:
· Отраженный сигнал от цели придет с запозданием на время tзад, что приведет к ошибке измерения, вызванной сканированием антенны.
· Сами пачки импульсов одного и другого периода сканирования также будут отличаться за счет смещения цели.
(2.1)
Для фиксации временных интервалов tβ ц в каждом периоде сканирования формируется опорный импульс βо (εо) для определения начала отсчета сектора сканирования.
Такой принцип измерения обладает рядом недостатков, связанных с ошибками измерения:
· Отраженный сигнал от цели придет с запозданием на время tзад, что приведет к ошибке измерения, вызванной сканированием антенны.
· Сами пачки импульсов одного и другого периода сканирования также будут отличаться за счет смещения цели.
 Рис.7
3. Радиотехнические координаторы с коническим сканированием
3.1 Сущность метода конического сканирования и принцип измерения координат
Данные координаторы могут быть следящего типа и с фиксированной осью, причем ось антенны связана с осью координатора.
Рассмотрим ДНА игольчатого типа смещенной относительно оси антенны на угол скоса Δα. Затем диаграмму направленности антенны приведем во вращательное движение со скоростью Ωск. При этом в пространстве образуется окружность, конус вращения, через центр которого проходит РСН (Рис.8).
Рис.7
3. Радиотехнические координаторы с коническим сканированием
3.1 Сущность метода конического сканирования и принцип измерения координат
Данные координаторы могут быть следящего типа и с фиксированной осью, причем ось антенны связана с осью координатора.
Рассмотрим ДНА игольчатого типа смещенной относительно оси антенны на угол скоса Δα. Затем диаграмму направленности антенны приведем во вращательное движение со скоростью Ωск. При этом в пространстве образуется окружность, конус вращения, через центр которого проходит РСН (Рис.8).
 Рис.8
Если цель находится на РСН (Рис. 9), то принимаемые отраженные сигналы цели имеют одинаковую амплитуду и имеют запаздывание по отношению к зондирующим (излучаемым) импульсам равное tц. Исходя из этого дальность до цели можно определить
Dц =
Рис.8
Если цель находится на РСН (Рис. 9), то принимаемые отраженные сигналы цели имеют одинаковую амплитуду и имеют запаздывание по отношению к зондирующим (излучаемым) импульсам равное tц. Исходя из этого дальность до цели можно определить
Dц =  , (3.1)
где С – скорость света.
, (3.1)
где С – скорость света.
 Рис. 9
Направление на цель определяется направлением равносигнального направления в азимутальной и угломестной плоскости.
В случае отклонения цели от равносигнального направления, принимаемые сигналы будут промодулированы частотой сканирования ДН Ωск, при этом в параметрах огибающей будет заложена информация о величине и направлении отклонения цели от РСН (Рис. 10). При этом глубина модуляции определяется как:
m=
Рис. 9
Направление на цель определяется направлением равносигнального направления в азимутальной и угломестной плоскости.
В случае отклонения цели от равносигнального направления, принимаемые сигналы будут промодулированы частотой сканирования ДН Ωск, при этом в параметрах огибающей будет заложена информация о величине и направлении отклонения цели от РСН (Рис. 10). При этом глубина модуляции определяется как:
m=  (3.2)
то есть
Uc о = Uc *cos(Ωск t- φ)(3.3)
Таким образом, глубина модуляции определяет амплитудой сигнала Uc, а направление отклонения от РСН - фазой φ.
Координатор цели с коническим сканированием при облучении цели модулирует сигнал дважды: при непосредственном облучении цели и при приеме отраженного сигнала. Такие координаторы принято называть с двухсторонней равносигнальной зоной.
(3.2)
то есть
Uc о = Uc *cos(Ωск t- φ)(3.3)
Таким образом, глубина модуляции определяет амплитудой сигнала Uc, а направление отклонения от РСН - фазой φ.
Координатор цели с коническим сканированием при облучении цели модулирует сигнал дважды: при непосредственном облучении цели и при приеме отраженного сигнала. Такие координаторы принято называть с двухсторонней равносигнальной зоной.
 Рис. 10
Структурная схема такого координатора представлена на рис. 11.
Рис. 10
Структурная схема такого координатора представлена на рис. 11.
 Рис.11
Мощные электромагнитные импульсы сформированные в передатчике (ПРД) поступают на раскрыв антенны, где формируется игольчатая ДН. При этом коническое вращение луча антенны достигается за счет вращения рупора антенны (щелевого вибратора, петли-согласования) модулятором (М). Задача модулятора обеспечить постоянною частоту сканирования Ωск.
Отраженный сигнал от цели поступает в приемник (ПРМ), где осуществляется усиление сигнала и преобразование (понижение) несущей частоты. Далее сигнал поступает в автомат дальности (АД) и в канал сигнала ошибки (КСО).
В канале выделения сигнала ошибки (КСО) выделяется огибающая Uc о. С выхода КСО сигнал поступает на два угловых дискриминатора УДβ и УДε, на второй вход которых поступает напряжение с генератора опорного напряжения (ГОН). При этом опорные напряжения сдвинуты друг относительно друга на 90º и жестко связаны с частотой вращения модулятора Ωск.
С выходов угловых дискриминаторов напряжение управления Uупр β иUупр ε в систему управления антенной СУАβ и СУАε, где осуществляется отработка этого напряжения и совмещения РСН с целью. При этом:
Uупр ε =Uc о sin φ= Uc cos(Ωск t- φ) sin φ; (3.4)
Uупр β =Uc о cos φ= Uc cos(Ωск t- φ) cos φ; (3.5)
3.2 Основные ошибки измерения углов и координат при коническом сканировании
- методические ошибки.
Они обусловлены двойной модуляцией сигналов цели при излучении и приеме вращающейся диаграммой направленности и конечной скоростью распространения радиоволн.
Рис.11
Мощные электромагнитные импульсы сформированные в передатчике (ПРД) поступают на раскрыв антенны, где формируется игольчатая ДН. При этом коническое вращение луча антенны достигается за счет вращения рупора антенны (щелевого вибратора, петли-согласования) модулятором (М). Задача модулятора обеспечить постоянною частоту сканирования Ωск.
Отраженный сигнал от цели поступает в приемник (ПРМ), где осуществляется усиление сигнала и преобразование (понижение) несущей частоты. Далее сигнал поступает в автомат дальности (АД) и в канал сигнала ошибки (КСО).
В канале выделения сигнала ошибки (КСО) выделяется огибающая Uc о. С выхода КСО сигнал поступает на два угловых дискриминатора УДβ и УДε, на второй вход которых поступает напряжение с генератора опорного напряжения (ГОН). При этом опорные напряжения сдвинуты друг относительно друга на 90º и жестко связаны с частотой вращения модулятора Ωск.
С выходов угловых дискриминаторов напряжение управления Uупр β иUупр ε в систему управления антенной СУАβ и СУАε, где осуществляется отработка этого напряжения и совмещения РСН с целью. При этом:
Uупр ε =Uc о sin φ= Uc cos(Ωск t- φ) sin φ; (3.4)
Uупр β =Uc о cos φ= Uc cos(Ωск t- φ) cos φ; (3.5)
3.2 Основные ошибки измерения углов и координат при коническом сканировании
- методические ошибки.
Они обусловлены двойной модуляцией сигналов цели при излучении и приеме вращающейся диаграммой направленности и конечной скоростью распространения радиоволн.
 Рис. 12
На Рис.12 положение диаграммы направленности А –соответствует моменту излучения, Б – положение ДН в момент приема, В – результирующая ДН. Таким образом, за время равное tц (время распространения электромагнитной энергии до цели и обратно) диаграмма направленности повернется на угол Δφ≡
Рис. 12
На Рис.12 положение диаграммы направленности А –соответствует моменту излучения, Б – положение ДН в момент приема, В – результирующая ДН. Таким образом, за время равное tц (время распространения электромагнитной энергии до цели и обратно) диаграмма направленности повернется на угол Δφ≡  Временные развертки ДН (Рис.13) при передаче А, при приеме Б и результирующая В имеют разные фазы. Так как фаза опорного сигнала определяется фазой вращения ДНА на излучение (реальная ДН), а фаза огибающей сигнала ошибки определяется фазой вращения результирующей ДН, то возникает разность фаз между опорным напряжением Uоп и сигнала ошибки Uc о.
Временные развертки ДН (Рис.13) при передаче А, при приеме Б и результирующая В имеют разные фазы. Так как фаза опорного сигнала определяется фазой вращения ДНА на излучение (реальная ДН), а фаза огибающей сигнала ошибки определяется фазой вращения результирующей ДН, то возникает разность фаз между опорным напряжением Uоп и сигнала ошибки Uc о.
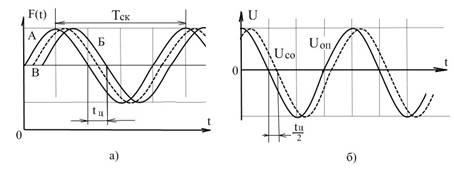 Рис. 13
Эта разность фаз и является методической ошибкой:
Δφм = Ωск
Рис. 13
Эта разность фаз и является методической ошибкой:
Δφм = Ωск  Fск
Fск  Fск (3.6)
tц =180º tц
Fск (3.6)
tц =180º tц  (3.7)
Таким образом, методическая ошибка в РТК с коническим сканированием воздействует на фазу сигнала ошибки и в следящих координаторах не оказывает существенного влияния на точность измерения углов координат, так как при взятии цели на автосопровождение (АС) РСН перемещается на цель.
В РТК с фиксированной осью эта ошибка приводит непосредственно к ошибкам измерения координат.
-ошибки за счет флюктуаций амплитуд принимаемых от цели сигналов
Флюктуация амплитуды принимаемых сигналов приводят к возникновению паразитной амплитудной модуляции, что вызывает паразитный сигнал ошибки.
Паразитная флюктуация возникает и тогда, когда цель находится на РСН. Ошибка эта случайна и среднеквадратическая ошибка определения углов координат вычисляется по формуле:
σεц = σβц =
(3.7)
Таким образом, методическая ошибка в РТК с коническим сканированием воздействует на фазу сигнала ошибки и в следящих координаторах не оказывает существенного влияния на точность измерения углов координат, так как при взятии цели на автосопровождение (АС) РСН перемещается на цель.
В РТК с фиксированной осью эта ошибка приводит непосредственно к ошибкам измерения координат.
-ошибки за счет флюктуаций амплитуд принимаемых от цели сигналов
Флюктуация амплитуды принимаемых сигналов приводят к возникновению паразитной амплитудной модуляции, что вызывает паразитный сигнал ошибки.
Паразитная флюктуация возникает и тогда, когда цель находится на РСН. Ошибка эта случайна и среднеквадратическая ошибка определения углов координат вычисляется по формуле:
σεц = σβц =  mэф
mэф  (3.8)
где:
mэф –эффективная глубина модуляции вызванная флюктуациями,
Кmg –крутизна модуляционной характеристики,
Sm (Fc к) и Sm (0)–энергетическая спектральная плотность на частоте сканирования и нулевой частоте,
ΔFкц –полоса пропускания приемника угловой следящей системы,
ΔFn –эквивалент полосы помехи.
Соотношение
(3.8)
где:
mэф –эффективная глубина модуляции вызванная флюктуациями,
Кmg –крутизна модуляционной характеристики,
Sm (Fc к) и Sm (0)–энергетическая спектральная плотность на частоте сканирования и нулевой частоте,
ΔFкц –полоса пропускания приемника угловой следящей системы,
ΔFn –эквивалент полосы помехи.
Соотношение  и ΔFn определяется из графика (Рис.14):
и ΔFn определяется из графика (Рис.14):
 Рис.14
3.3 Повышение точности измерения угловых координат
Для подавления паразитной амплитуды модуляции используют 2-х канальные координаторы с коническим сканированием (Рис.15). Антенной создаются две диаграммы направленности смещенные на угол Δα. При сканировании двух ДН принимаемый сигнал модулируется по амплитуде в противофазе. Паразитная амплитудная модуляция в обеих каналах будет в фазе.
Сигналы, принятые двумя ДН, можно записать как:
UI =E(1+x(t))]FI (Δα)[1+mI cos(Ωск t-φI)(3.9)
UII = E(1+x(t))]FII (Δα)[1-mII cos(Ωск t-φII)(3.10)
Где:
Е – средний уровень напряженности поля принимающей антенной волны,
x(t) – паразитная амплитудная модуляция,
mI и mII – коэффициент амплитудной модуляции.
Если mI = mII =m, а FI (Δα)= FII (Δα)= F(Δα) и φI = φII =φ, то после суммарно-разностной обработки получим – сигнал ошибки Uc о равный:
Рис.14
3.3 Повышение точности измерения угловых координат
Для подавления паразитной амплитуды модуляции используют 2-х канальные координаторы с коническим сканированием (Рис.15). Антенной создаются две диаграммы направленности смещенные на угол Δα. При сканировании двух ДН принимаемый сигнал модулируется по амплитуде в противофазе. Паразитная амплитудная модуляция в обеих каналах будет в фазе.
Сигналы, принятые двумя ДН, можно записать как:
UI =E(1+x(t))]FI (Δα)[1+mI cos(Ωск t-φI)(3.9)
UII = E(1+x(t))]FII (Δα)[1-mII cos(Ωск t-φII)(3.10)
Где:
Е – средний уровень напряженности поля принимающей антенной волны,
x(t) – паразитная амплитудная модуляция,
mI и mII – коэффициент амплитудной модуляции.
Если mI = mII =m, а FI (Δα)= FII (Δα)= F(Δα) и φI = φII =φ, то после суммарно-разностной обработки получим – сигнал ошибки Uc о равный:
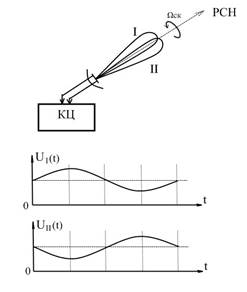 Рис.15
Uc о (t)=
Рис.15
Uc о (t)=  = m cos(Ωск t-φ)(3.11)
Таким образом, как видно из формулы, сигнал паразитной амплитудной модуляции отсутствует. Реализация этого принципа осуществлено в двухканальных радиотехнических координаторах с коническим сканированием с применением суммарно-разностной обработки сигнала.
Такая обработка сигнала позволяет вести борьбу не только с паразитной амплитудной модуляцией, но и с ответной угловой помехой, так как сигнал ответной угловой помехи будет приниматься в фазе.
Иногда такие координаторы называют координаторами с биконическим сканированием.
Функциональная схема такого координатора представлена на Рис.16.
= m cos(Ωск t-φ)(3.11)
Таким образом, как видно из формулы, сигнал паразитной амплитудной модуляции отсутствует. Реализация этого принципа осуществлено в двухканальных радиотехнических координаторах с коническим сканированием с применением суммарно-разностной обработки сигнала.
Такая обработка сигнала позволяет вести борьбу не только с паразитной амплитудной модуляцией, но и с ответной угловой помехой, так как сигнал ответной угловой помехи будет приниматься в фазе.
Иногда такие координаторы называют координаторами с биконическим сканированием.
Функциональная схема такого координатора представлена на Рис.16.
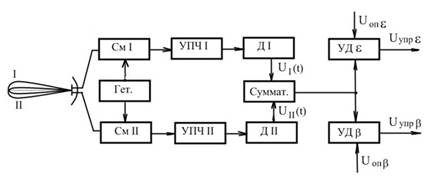 Рис. 16
4.Моноимпульсные координаторы
4.1 Общие сведения о моноимпульсном методе измерения угловых координат
Моноимпульсный метод позволяет устранить ошибки в определении угловых координат возникающих за счет флюктуаций амплитуд сигнала. При этом методе используется сравнение амплитуды и фазы принимаемых одновременно сигналов с помощью многоканальной системы.
Дальность в моноимпульсных координаторах определяется как и в координаторах с коническим и линейным сканированием.
Основным отличием моноимпульсных координаторов является формирование равносигнальной зоны (РСЗ) неподвижными диаграммами направленности созданными антеннами моноимпульсных координаторов.
Зависимость сигналов принятых амплитудной и фазовой диаграммой направленности определяется формулой:
Fк (α)=
Рис. 16
4.Моноимпульсные координаторы
4.1 Общие сведения о моноимпульсном методе измерения угловых координат
Моноимпульсный метод позволяет устранить ошибки в определении угловых координат возникающих за счет флюктуаций амплитуд сигнала. При этом методе используется сравнение амплитуды и фазы принимаемых одновременно сигналов с помощью многоканальной системы.
Дальность в моноимпульсных координаторах определяется как и в координаторах с коническим и линейным сканированием.
Основным отличием моноимпульсных координаторов является формирование равносигнальной зоны (РСЗ) неподвижными диаграммами направленности созданными антеннами моноимпульсных координаторов.
Зависимость сигналов принятых амплитудной и фазовой диаграммой направленности определяется формулой:
Fк (α)=  = F(α)
= F(α)  (4.1)
где,
Fк (α) – сигнал амплитудной ДН,
(4.1)
где,
Fк (α) – сигнал амплитудной ДН,
 –сигнал фазовой ДН,
α –угол прихода радиоволн,
Ек1 (α) и Ек2 (0) –комплексная амплитуда сигнала принятого с направления α и максимума диаграммы направленности (α =0).
В зависимости от того какая из ДН используется при определении направления различают два основных вида моноимпульсных систем:
1) Система с амплитудной пеленгацией,
2) Система с фазовой пеленгацией.
Для осуществления амплитудной пеленгации в одной плоскости антенны моноимпульсных систем должны формировать две ДН развернутые друг относительно друга на угол 2Δα, гдеΔα –угол скоса (Рис.17)
–сигнал фазовой ДН,
α –угол прихода радиоволн,
Ек1 (α) и Ек2 (0) –комплексная амплитуда сигнала принятого с направления α и максимума диаграммы направленности (α =0).
В зависимости от того какая из ДН используется при определении направления различают два основных вида моноимпульсных систем:
1) Система с амплитудной пеленгацией,
2) Система с фазовой пеленгацией.
Для осуществления амплитудной пеленгации в одной плоскости антенны моноимпульсных систем должны формировать две ДН развернутые друг относительно друга на угол 2Δα, гдеΔα –угол скоса (Рис.17)
 Рис. 17
Характерной особенностью для сигнала принятого такой системой является неравенство амплитуд сигналов Е1 и Е2, при этом фазы сигналов равны ν1 (ε)=ν2 (ε).
Для пеленгации сигнала в двух плоскостях βи ε создаются четыре ДН по две в каждой плоскости.
Для получения фазовой пеленгации антенна такой моноимпульсной системы должна формировать две ДН максимумы, которых направлены параллельно и разнесены в пространстве на величину базы S (Рис.18).
Тогда при приеме сигнала появляется разность «схода» Ssinε, а запаздывание во времени δt=
Рис. 17
Характерной особенностью для сигнала принятого такой системой является неравенство амплитуд сигналов Е1 и Е2, при этом фазы сигналов равны ν1 (ε)=ν2 (ε).
Для пеленгации сигнала в двух плоскостях βи ε создаются четыре ДН по две в каждой плоскости.
Для получения фазовой пеленгации антенна такой моноимпульсной системы должна формировать две ДН максимумы, которых направлены параллельно и разнесены в пространстве на величину базы S (Рис.18).
Тогда при приеме сигнала появляется разность «схода» Ssinε, а запаздывание во времени δt=  , в данном случае разность фаз определяется из формулы:
φ(ε)= ν1 (ε)-ν2 (ε)= ωо δt=
, в данном случае разность фаз определяется из формулы:
φ(ε)= ν1 (ε)-ν2 (ε)= ωо δt=  δt=
δt=  =
=  Ssinε (4.2)
амплитуды сигналов при этом будут практически равны.
Ssinε (4.2)
амплитуды сигналов при этом будут практически равны.
 Рис. 18
Для фазового пеленгатора для измерения углов в 2-х плоскостях должны быть созданы 4-е ДН, при помощи четырех рефлекторов расположенных симметрично относительно оси антенны.
4.2 Постулаты моноимпульсного метода
Моноимпульсный метод определения координат базируется на трех постулатах, определяющих преимущества этого способа.
1) Угловая информация извлекается в виде отношения сигналов принятых различными ДН моноимпульсных антенн (Рис 19).
Рис. 18
Для фазового пеленгатора для измерения углов в 2-х плоскостях должны быть созданы 4-е ДН, при помощи четырех рефлекторов расположенных симметрично относительно оси антенны.
4.2 Постулаты моноимпульсного метода
Моноимпульсный метод определения координат базируется на трех постулатах, определяющих преимущества этого способа.
1) Угловая информация извлекается в виде отношения сигналов принятых различными ДН моноимпульсных антенн (Рис 19).
 Рис. 19
a) Простое отношение (мультипликативное):
b)
rm (ε)=
Рис. 19
a) Простое отношение (мультипликативное):
b)
rm (ε)=  =
=  =
=  (4.3)
б) суммарно-разностное отношение (∑-Δ) (аддитивное):
ra (ε)=
(4.3)
б) суммарно-разностное отношение (∑-Δ) (аддитивное):
ra (ε)=  =
=  =
=  =
=  , (4.4)
где
EK 1 (ε) и EK 2 (ε) –комплексная амплитуда сигнала принятая I и II антенной с направления ε.
EK Δ (ε) –комплексная амплитуда разностного сигнала, состоящего из сигнала EK 1 иEK 2 и является не четной симметричной функцией угла ε.
EK ∑ (ε) –комплексная амплитуда суммарного сигнала EK 1 иEK 2, который является четной функцией угла прихода сигнала.
FK Δ (ε) –комплексная разностная ДН.
FK ∑ (ε) –комплексная суммарная ДН.
ra (ε) и rm (ε) являются функциями только угла прихода волны и не зависят от абсолютного уровня принятого сигнала.
2) Измеряемое отношение принятых сигналов, при переходе от положительного угла к равному отрицательному меняется на обратное. Это требование верно относительно симметричных ДН моноимпульсной антенны.
3) Пеленгационная характеристика моноимпульсной системы является не четной действительной функцией угла прихода ε (Рис 20).
, (4.4)
где
EK 1 (ε) и EK 2 (ε) –комплексная амплитуда сигнала принятая I и II антенной с направления ε.
EK Δ (ε) –комплексная амплитуда разностного сигнала, состоящего из сигнала EK 1 иEK 2 и является не четной симметричной функцией угла ε.
EK ∑ (ε) –комплексная амплитуда суммарного сигнала EK 1 иEK 2, который является четной функцией угла прихода сигнала.
FK Δ (ε) –комплексная разностная ДН.
FK ∑ (ε) –комплексная суммарная ДН.
ra (ε) и rm (ε) являются функциями только угла прихода волны и не зависят от абсолютного уровня принятого сигнала.
2) Измеряемое отношение принятых сигналов, при переходе от положительного угла к равному отрицательному меняется на обратное. Это требование верно относительно симметричных ДН моноимпульсной антенны.
3) Пеленгационная характеристика моноимпульсной системы является не четной действительной функцией угла прихода ε (Рис 20).
 Рис. 20
Это означает, что пеленгационная характеристика должна указывать как на величину так и на знак угла прихода волны, то есть обладает не четной симметрией.
4.3.Преимкщества и недостатки моноимпульсного метода.
Преимущества:
1) Так как угловая информация выделяется в виде отношений сигналов, то точность измерения не зависит от амплитуды флюктуаций отраженных сигналов.
2) Выделение отношений принимаемых сигналов происходит в течении действия каждого импульса, то сесть информация о трех координатах извлекается при получении одного импульса от цели, а не за счет накопления информации от пачки импульсов.
3) Моноимпульсные координаторы защищены от угловых ответных помех, а также от непрерывных шумовых помех (за счет изменения амплитуды сигнала от импульса к импульсу).
4) В моноимпульсных системах отсутствуют методические ошибки по сравнению с координаторами линейного и конического сканирования. Кроме этого отношение принимаемых сигналов не зависит то скорости распространения радиоволн.
5) Дальность действия моноимпульсных координаторов превышает аналогичные по параметрам координаторы с линейным и коническим сканированием, за счет того, что линия излучения электромагнитной энергии совпадает с РСН антенн при приеме сигналов.
Недостатки:
1) Трудность создания симметрии при формировании суммарной и суммарно-разностных ДН.
2) Сложность обеспечения идентичности приема амплитудных и фазовых характеристик приемных систем
4.4 Построение моноимпульсного координатора для пеленгования в двух плоскостях
Моноимпульсные координаторы могут быть:
1) Трехканальные с четырьмя ДН.
2) Двухканальные с четырьмя ДН.
3) Двухканальные с двумя ДН.
Трехканальные моноимпульсные координаторы с четырьмя ДН для пеленгации в двух плоскостях (по азимуту и углу места) используют четыре ДН (Рис. 21).
Для определения азимута берется соотношение сигналов левых и правых ДН (ad и bc). Для определения угла места используется соотношение верхней и нижней пары ДН(ab и dc).
Для преобразования информации в суммарную и разностную используют четыре кольцевых моста (Рис.22).
Рис. 20
Это означает, что пеленгационная характеристика должна указывать как на величину так и на знак угла прихода волны, то есть обладает не четной симметрией.
4.3.Преимкщества и недостатки моноимпульсного метода.
Преимущества:
1) Так как угловая информация выделяется в виде отношений сигналов, то точность измерения не зависит от амплитуды флюктуаций отраженных сигналов.
2) Выделение отношений принимаемых сигналов происходит в течении действия каждого импульса, то сесть информация о трех координатах извлекается при получении одного импульса от цели, а не за счет накопления информации от пачки импульсов.
3) Моноимпульсные координаторы защищены от угловых ответных помех, а также от непрерывных шумовых помех (за счет изменения амплитуды сигнала от импульса к импульсу).
4) В моноимпульсных системах отсутствуют методические ошибки по сравнению с координаторами линейного и конического сканирования. Кроме этого отношение принимаемых сигналов не зависит то скорости распространения радиоволн.
5) Дальность действия моноимпульсных координаторов превышает аналогичные по параметрам координаторы с линейным и коническим сканированием, за счет того, что линия излучения электромагнитной энергии совпадает с РСН антенн при приеме сигналов.
Недостатки:
1) Трудность создания симметрии при формировании суммарной и суммарно-разностных ДН.
2) Сложность обеспечения идентичности приема амплитудных и фазовых характеристик приемных систем
4.4 Построение моноимпульсного координатора для пеленгования в двух плоскостях
Моноимпульсные координаторы могут быть:
1) Трехканальные с четырьмя ДН.
2) Двухканальные с четырьмя ДН.
3) Двухканальные с двумя ДН.
Трехканальные моноимпульсные координаторы с четырьмя ДН для пеленгации в двух плоскостях (по азимуту и углу места) используют четыре ДН (Рис. 21).
Для определения азимута берется соотношение сигналов левых и правых ДН (ad и bc). Для определения угла места используется соотношение верхней и нижней пары ДН(ab и dc).
Для преобразования информации в суммарную и разностную используют четыре кольцевых моста (Рис.22).
 Рис. 21
Излучение электромагнитной энергии осуществляется через все четыре ДН. Логика образования суммарного и разностного сигнала следующая:
- суммарный сигнал ∑ = a+b+c+d
- разностный Δε = (c+d)-(a+b) и Δβ = (a+d)-(b+c).
Рис. 21
Излучение электромагнитной энергии осуществляется через все четыре ДН. Логика образования суммарного и разностного сигнала следующая:
- суммарный сигнал ∑ = a+b+c+d
- разностный Δε = (c+d)-(a+b) и Δβ = (a+d)-(b+c).
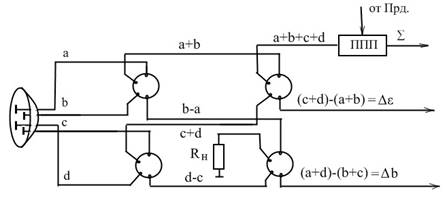 Рис. 22
Третий разностный сигнал, по диагонали (a+c)-(b+d) не используется и компенсируется нагрузкой.
Суммарный и разностный сигналы подаются на трехканальный суммарно-разностный угловой дискриминатор.
Двухканальные моноимпульсные координаторы с четырьмя ДН используют принцип сложения 2-х разностных каналов (Δε иΔβ) со сдвигом фазы одного из них на 90º. Такой сдвиг можно получить пропустив один из разностных каналов через дополнительную секцию, тем самым обеспечив больший путь прохождения разностного сигнала.
После общего усиления разностных сигналов в фазовых детекторах углового дискриминатора осуществляется разделение этих сигналов по плоскостям за счет того, что к одному из фазовых детекторов подается в фазе (Δβ) (Рис.23), а ко второму в противофазе со сдвигом на 90º (Δε).
Рис. 22
Третий разностный сигнал, по диагонали (a+c)-(b+d) не используется и компенсируется нагрузкой.
Суммарный и разностный сигналы подаются на трехканальный суммарно-разностный угловой дискриминатор.
Двухканальные моноимпульсные координаторы с четырьмя ДН используют принцип сложения 2-х разностных каналов (Δε иΔβ) со сдвигом фазы одного из них на 90º. Такой сдвиг можно получить пропустив один из разностных каналов через дополнительную секцию, тем самым обеспечив больший путь прохождения разностного сигнала.
После общего усиления разностных сигналов в фазовых детекторах углового дискриминатора осуществляется разделение этих сигналов по плоскостям за счет того, что к одному из фазовых детекторов подается в фазе (Δβ) (Рис.23), а ко второму в противофазе со сдвигом на 90º (Δε).
 Рис. 23
Недостатками такой системы является:
-жесткие требования к идентичности характеристик усилителей каналов
-при наличии паразитного сдвига между суммарным и общим разностным каналом, в каналах образуются паразитные сигналы (пролазы).
Двухканальные моноимпульсные координаторы с двумя ДН используют принцип поочередной запитки вращающимся волноводом или петлей связи соответствующей пары антенн с частотой вращения ГОН. Причем в одном из принятых разностных сигналов, для дальнейшей обработки, используют дополнительный сдвиг фазы на 90º.
4.5 Особенности построения помехозащищенных моноимпульсных координаторов
В большинстве случаев работа РЛС сопровождения осуществляется в сложной помеховой обстановке и прежде всего в условиях сильных пассивных помех. В этом случае для защиты используется режим СДЦ. Но в этом случае при обработке сигналов теряется информация об угловом положении цели.
Поэтому, возникает необходимость, для сохранения информации об угловом положении цели содержащуюся в амплитуде и фазе высокочастотного сигнала использовать амплитуду и фазу низкочастотной огибающей последовательности импульсов, которые на разрушаются при обработке в режиме СДЦ.
В этом случае моноимпульсные координаторы теряют одно из своих преимуществ – способность определения угловых координат по одному импульсу и приобретают свойства системы с интегральной равносигнальной зоной.
Для того, чтобы моноимпульсный координатор сохранил свое свойство – независимость от абсолютной амплитуды принимаемого сигнала, мгновенную пространственную равносигнальную зону преобразуют в две противофазных интегральных РСЗ, аналогичных как в радиотехнических координаторах с коническим сканированием.
Эта система называется моноконической системой. В ее составе (Рис.24) антенна формирующая четырех лепестковую ДН, суммарно-разностный преобразователь, на выходе которого имеем три канала: Δβ, Δεи∑. В дальнейшем происходит преобразование в 2-х канальную систему с одним разностным (Δcos(Ωt-φ)) и одним суммарным каналом (∑).
Общий разностный канал (Δcos(Ωt-φ)) получается при помощи круглого волновода, на который подаются два разностных сигнала (Δβ и Δε) в квадратуре:
Δ=
Рис. 23
Недостатками такой системы является:
-жесткие требования к идентичности характеристик усилителей каналов
-при наличии паразитного сдвига между суммарным и общим разностным каналом, в каналах образуются паразитные сигналы (пролазы).
Двухканальные моноимпульсные координаторы с двумя ДН используют принцип поочередной запитки вращающимся волноводом или петлей связи соответствующей пары антенн с частотой вращения ГОН. Причем в одном из принятых разностных сигналов, для дальнейшей обработки, используют дополнительный сдвиг фазы на 90º.
4.5 Особенности построения помехозащищенных моноимпульсных координаторов
В большинстве случаев работа РЛС сопровождения осуществляется в сложной помеховой обстановке и прежде всего в условиях сильных пассивных помех. В этом случае для защиты используется режим СДЦ. Но в этом случае при обработке сигналов теряется информация об угловом положении цели.
Поэтому, возникает необходимость, для сохранения информации об угловом положении цели содержащуюся в амплитуде и фазе высокочастотного сигнала использовать амплитуду и фазу низкочастотной огибающей последовательности импульсов, которые на разрушаются при обработке в режиме СДЦ.
В этом случае моноимпульсные координаторы теряют одно из своих преимуществ – способность определения угловых координат по одному импульсу и приобретают свойства системы с интегральной равносигнальной зоной.
Для того, чтобы моноимпульсный координатор сохранил свое свойство – независимость от абсолютной амплитуды принимаемого сигнала, мгновенную пространственную равносигнальную зону преобразуют в две противофазных интегральных РСЗ, аналогичных как в радиотехнических координаторах с коническим сканированием.
Эта система называется моноконической системой. В ее составе (Рис.24) антенна формирующая четырех лепестковую ДН, суммарно-разностный преобразователь, на выходе которого имеем три канала: Δβ, Δεи∑. В дальнейшем происходит преобразование в 2-х канальную систему с одним разностным (Δcos(Ωt-φ)) и одним суммарным каналом (∑).
Общий разностный канал (Δcos(Ωt-φ)) получается при помощи круглого волновода, на который подаются два разностных сигнала (Δβ и Δε) в квадратуре:
Δ=  (4.5)
Интенсивность поля в круглом волноводе (Рис. 25) характеризует величину отклонения цели от РСН. Фаза поля характеризует знак или направление отклонения цели от РСН:
(4.5)
Интенсивность поля в круглом волноводе (Рис. 25) характеризует величину отклонения цели от РСН. Фаза поля характеризует знак или направление отклонения цели от РСН:
 (4.6)
Информация об угловом положении цели отбирается из круглого волновода при помощи модулятора, который вращается с угловой скоростью Ω.
(4.6)
Информация об угловом положении цели отбирается из круглого волновода при помощи модулятора, который вращается с угловой скоростью Ω.
 Рис. 24
Характерным является то, что при переходе модулятором нулевого положения, фаза высокочастотного сигнала в нем меняется на противоположную. Нулевым положением считается положение, когда широкая стенка волновода совпадает с расположением электрических линий.
Рис. 24
Характерным является то, что при переходе модулятором нулевого положения, фаза высокочастотного сигнала в нем меняется на противоположную. Нулевым положением считается положение, когда широкая стенка волновода совпадает с расположением электрических линий.
 Рис. 25
Таким образом,на выходе модулятора образуются колебания (Рис. 26), которые можно описать выражением Δcos(Ωt-φ).
Рис. 25
Таким образом,на выходе модулятора образуются колебания (Рис. 26), которые можно описать выражением Δcos(Ωt-φ).
 Рис. 26
При переходе через ноль фаза сигнала меняется. Суммарный и общий разностный сигнал подаются на сумматор в котором и формируются две противофазные интегральные зоны, которые можно записать в виде:
U1 (t) ≡∑+Δcos(Ωt-φ) = ∑(1+mcos(Ωt-φ)) 4.7)
U2 (t) ≡∑-Δcos(Ωt-φ) =∑(1 - mcos(Ωt-φ)) (4.8)
Где m глубина модуляции и может быть выражена как:
m=
Рис. 26
При переходе через ноль фаза сигнала меняется. Суммарный и общий разностный сигнал подаются на сумматор в котором и формируются две противофазные интегральные зоны, которые можно записать в виде:
U1 (t) ≡∑+Δcos(Ωt-φ) = ∑(1+mcos(Ωt-φ)) 4.7)
U2 (t) ≡∑-Δcos(Ωt-φ) =∑(1 - mcos(Ωt-φ)) (4.8)
Где m глубина модуляции и может быть выражена как:
m=  (4.9)
Таким образом, рассмотренная схема входного устройства (Рис. 24) угломера обеспечивает преобразование моноимпульсной информации об угловом положении цели в амплитуде и фазе высокочастотного сигнала в информацию содержащуюся в амплитуде и фазе низкочастотной огибающей сигналов.
4.6 Структурная схема РЛС сопровождения
Исходя из всего рассмотренного предлагается схема помехозащищенной, двухканальной моноимпульсной РЛС сопровождения (Рис. 27).
(4.9)
Таким образом, рассмотренная схема входного устройства (Рис. 24) угломера обеспечивает преобразование моноимпульсной информации об угловом положении цели в амплитуде и фазе высокочастотного сигнала в информацию содержащуюся в амплитуде и фазе низкочастотной огибающей сигналов.
4.6 Структурная схема РЛС сопровождения
Исходя из всего рассмотренного предлагается схема помехозащищенной, двухканальной моноимпульсной РЛС сопровождения (Рис. 27).
 Рис. 27
Рассмотрим работу схемы РЛС сопровождения.
Непрерывный высококогерентный сигнал с генератора кварцевого ГК на частоте f0 -fпч поступает на преобразователь частоты (смеситель с полосовым фильтром на частоте f0), на второй вход которого поступают импульсы с генератора ПЧ с частотой заполнения fпч. Длительность и период повторения задается синхронизатором.
Работа преобразователя основана на работе пролетного клистрона (Рис. 28).
Рис. 27
Рассмотрим работу схемы РЛС сопровождения.
Непрерывный высококогерентный сигнал с генератора кварцевого ГК на частоте f0 -fпч поступает на преобразователь частоты (смеситель с полосовым фильтром на частоте f0), на второй вход которого поступают импульсы с генератора ПЧ с частотой заполнения fпч. Длительность и период повторения задается синхронизатором.
Работа преобразователя основана на работе пролетного клистрона (Рис. 28).
 Рис. 28
С выхода преобразователя частоты импульсы на частоте f0 поступают на усилитель мощности, который открывается в соответствии с импульсами запуска передатчика ИЗП усиленными в модуляторе. Работа синхронизатора обеспечивает совпадение по времени открытие усилителя мощности импульсами ИЗП и импульсами с выхода преобразователя на частоте f0.
Мощные высокочастотные импульсы с выхода УМ поступают на антенный переключатель выполненный на основе феритового цыркулятора и далее на вход суммарного канала облучателя.
При сопровождении формирование ДН осуществляется суммированием однолепестковой суммарной ДН и двух лепестковых разностных ДН (β и ε) формируемых на выходах трехканального облучателя.
Сигнал суммарного канала ∑ через антенный переключатель поступает на один из входов сумматора, выполненного на базе феритового коммутатора, а сигналы разностных каналов Δβ, Δε поступают на модулятор, приэтом сигнал угломестного разностного сигнала проходит дополнительно через секцию фазирования j. Работа модулятора и сумматора была описана выше (Рис. 24).
С выхода сумматора сигналы U1 (t) и U2 (t), по двум независимым каналам поступают на балансные смесители (СМ I, СМ II). Следует еще раз обратить внимание, что каждый из этих сигналов содержит информацию о величине отклонения цели от РСН и знаке отклонения. Таким образом, достаточным условием для обеспечения сопровождения цели
Рис. 28
С выхода преобразователя частоты импульсы на частоте f0 поступают на усилитель мощности, который открывается в соответствии с импульсами запуска передатчика ИЗП усиленными в модуляторе. Работа синхронизатора обеспечивает совпадение по времени открытие усилителя мощности импульсами ИЗП и импульсами с выхода преобразователя на частоте f0.
Мощные высокочастотные импульсы с выхода УМ поступают на антенный переключатель выполненный на основе феритового цыркулятора и далее на вход суммарного канала облучателя.
При сопровождении формирование ДН осуществляется суммированием однолепестковой суммарной ДН и двух лепестковых разностных ДН (β и ε) формируемых на выходах трехканального облучателя.
Сигнал суммарного канала ∑ через антенный переключатель поступает на один из входов сумматора, выполненного на базе феритового коммутатора, а сигналы разностных каналов Δβ, Δε поступают на модулятор, приэтом сигнал угломестного разностного сигнала проходит дополнительно через секцию фазирования j. Работа модулятора и сумматора была описана выше (Рис. 24).
С выхода сумматора сигналы U1 (t) и U2 (t), по двум независимым каналам поступают на балансные смесители (СМ I, СМ II). Следует еще раз обратить внимание, что каждый из этих сигналов содержит информацию о величине отклонения цели от РСН и знаке отклонения. Таким образом, достаточным условием для обеспечения сопровождения цели 