 |


Регуляторы систем автоматизации, их классификация, алгоритмы, техническая и программная реализация, переходные и частотные характеристики.
|
|
|
|
Билет 18, часть 1.
Одним из основных элементов, входящим в систему регулирования является автоматический регулятор – устройство, изменяющее или стабилизирующее выходную величину объекта регулирования по заданному алгоритму путем воздействия на его входную величину.
Классификация регуляторов может осуществляться по различным признакам. По способу действия они делятся на регуляторы прямого и непрямого действия.
На практике более широкое применение получили регуляторы непрямого действия. Данные регуляторы классифицируются по виду источника подводимой энергии для перемещения исполнительного механизма: электрические, гидравлические, пневматические и комбинированные.
Кроме того, регуляторы классифицируются на релейные, непрерывные и импульсные. Релейные регуляторы называют еще позиционными.
Регуляторы подразделяются также на экстремальные и стабилизирующие. Экстремальные регуляторы могут использоваться на объектах, характеризующихся экстремальной статической характеристикой.
Наибольшее распространение получили стабилизирующие регуляторы (рис. 5.1)

На схеме обозначено: μ – воздействие регулятора на регулирующий орган (РО) с помощью исполнительного механизма (ИМ); Δ – сигнал рассогласования, выделенный на элементе сравнения (ЭС) и равный векторной разнице между текущим (yт) и заданным (yз) значениями регулируемой величины
Законы регулирования
Зависимость управляющего сигнала, вырабатываемого регулятором, от сигнала рассогласования во времени определяется законом регулирования, в общем виде эта зависимость может быть представлена:
 (5.1)
(5.1)
В зависимости от вида функции (5.1) стабилизирующие регуляторы классифицируются на интегральные (И), пропорциональные (П), пропорционально-интегральные (ПИ), пропорционально-дифференциальные (ПД) и пропорционально-интегрально-дифференциальные (ПИД). Закон регулирования формируется с помощью обратных связей. С учетом динамических свойств объекта управления он определяет вид и качество переходного процесса в АСР.
|
|
|
Интегральный (И) закон регулирования. Регуляторы, реализующие данный закон, часто называют астатическими или регуляторами без обратной связи. В динамическом отношении И-закон регулирования подобен интегрирующему звену, уравнение регулятора и передаточная функция имеют вид:
или в дифференциальной форме:

где kр – статический коэффициент передачи регулятора;
Тu – время интегрирования.
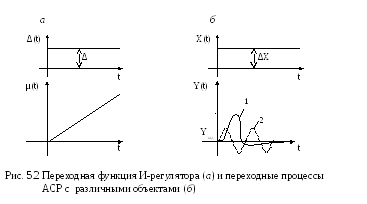
Из (5.2) следует, что скорость движения регулирующего органа для данного закона пропорциональна величине рассогласования. На рис. 5.2 а показана переходная функция И-регулятора.
Регуляторы, работающие по данному закону, всегда приводят регулируемый параметр к заданному значению, если объект обладает свойством самовыравнивания (рис. 5.2 б, кривая 1).
Применение данного закона регулирования при управлении астатическим объектом, приводит к переходному процессу в виде незатухающих колебаний выходного параметра (кривая 2, рис. 5.2).
Пропорциональный (П) закон регулирования. Регуляторы, реализующие данный закон, еще называют регуляторами с жесткой обратной связью или статическими.
Уравнение П-регулятора и передаточная функция имеют вид:
 (5.3)
(5.3)
где (кр) - коэффициент передачи регулятора. Переходная функция П-регулятора и типичный переходный процесс показаны на рис. 5.3.
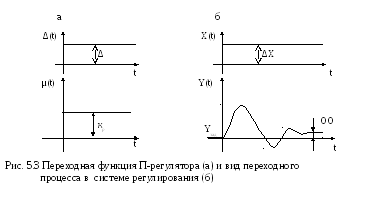
Из-за жесткой обратной связи П-регулятор не имеет возможности привести к заданному значению регулируемый параметр при изменении нагрузки на объект. Данное явление получило название остаточной неравномерности регулирования, она оценивается степенью неравномерности (δ), равной δ=1/кр.=Δ/μ..
|
|
|
Пропорциональные регуляторы обеспечивают устойчивую работу практически всех промышленных объектов.
Функциональная схема П-регулятора с сервоприводом с пропорциональной или интегральной скоростью перемещения:
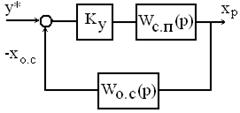
Отрицательная обратная связь в регуляторе осуществляется по положению регулирующего органа путем подачи на вход устройства обратной связи сигнала с выхода сервопривода. Конструктивно обратная связь осуществляется с помощью механической, электрической или другой передачи в зависимости от типов сервопривода и командно-усилительного устройства.
Пропорционально-дифференциальный (ПИ) закон регулирования. Регуляторы, работающие по данному закону, производят перемещение регулирующего органа пропорционально сумме отклонения и интеграла от отклонения регулируемой величины, т.е. осуществляют П- и И- воздействие:
 (5.4)
(5.4)
или в дифференциальной форме:
 (5.5)
(5.5)
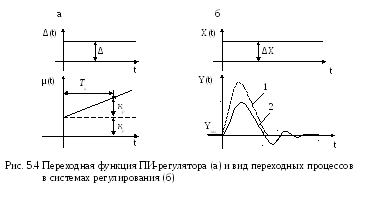
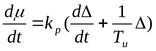
Реальные ПИ-регуляторы тепловых процессов имеют два вида функциональных схем (рис. 5.4.1). В первом варианте (рис. 5.4.1, а) сервопривод охватывается отрицательной обратной связью (ООС) и его характеристика не влияет на формирование закона регулирования, целиком определяемого характеристикой устройства обратной связи. Во втором варианте (рис. 5.4.1, б) сервопривод не охватывается обратной связью, и ПИ-закон регулирования формируется охватом обратной связью только усилителя Ку. При этом динамические характеристики регулятора в целом определяются динамическими свойствами цепи, состоящей из последовательно включенных замкнутого контура (Ky —Wo. c) и сервопривода. Оба варианта структурных схем ПИ-регуляторов используются в их промышленных исполнениях.
Рис. 5.4.1. Структурные схемы ПИ-регуляторов:
а — сервопривод охвачен ООС; б— сервопривод не охвачен ООС
Пропорционально-дифференциальный (ПД) закон регулирования. Регулятор, реализующий данный закон регулирования можно представить в виде системы, содержащей два параллельно работающих типовых звена: пропорционального и идеального дифференцирующего. Тогда уравнение ПД-закона имеет вид:
|
|
|
 (5.6)
(5.6)
Функциональная схема ПД-регулятора представлена на рис. 5.6.1, а. Дифференцирующая составляющая формируется специальным прибором — дифференциатором, обладающим характеристикой реального дифференцирующего звена. На его выходе формируется сигнал, пропорциональный скорости изменения регулируемой величины
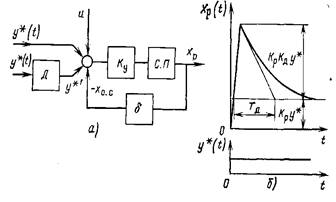
Рис. 5.6.1. ПД-регулятор: а — структурная схема; б — кривая переходного процесса.
Скоростной сигнал суммируется с сигналом по отклонению регулируемой величины. Результирующий сигнал поступает на вход усилителя. Усилитель и сервопривод охватываются жесткой отрицательной обратной связью. В замкнутом контуре усилитель— привод — обратная связь формируется П-закон регулирования с коэффициентом усиления Kр.
Пропорционально-интегрально-дифференциальный (ПИД) закон регулирования. Наиболее сложный алгоритм, включающий воздействие всех вышерассмотренных законов. Очевидно, что уравнение ПИД - закона имеют вид:

Перейдя к операторной форме, получим передаточную функцию:

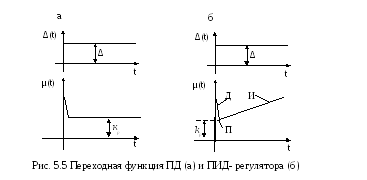
На рис. 5.5 б представлена переходная функция ПИД-закона, где выделены области воздействия составляющими П, И и Д – закона.
В реальных регуляторах формируется путем последовательной (рис. 6, а) или параллельной (рис. 7, б) коррекций ПИ-регулятора с помощью реального дифференцирующего (РД) звена. В обоих случаях ПИД-закон воспроизводится лишь приближенно.

Рис. 6. Последовательная (а) и параллельная (б) коррекция ПИ-регулятора с помощью дифференцирующего звена.
|
|
|
