 |


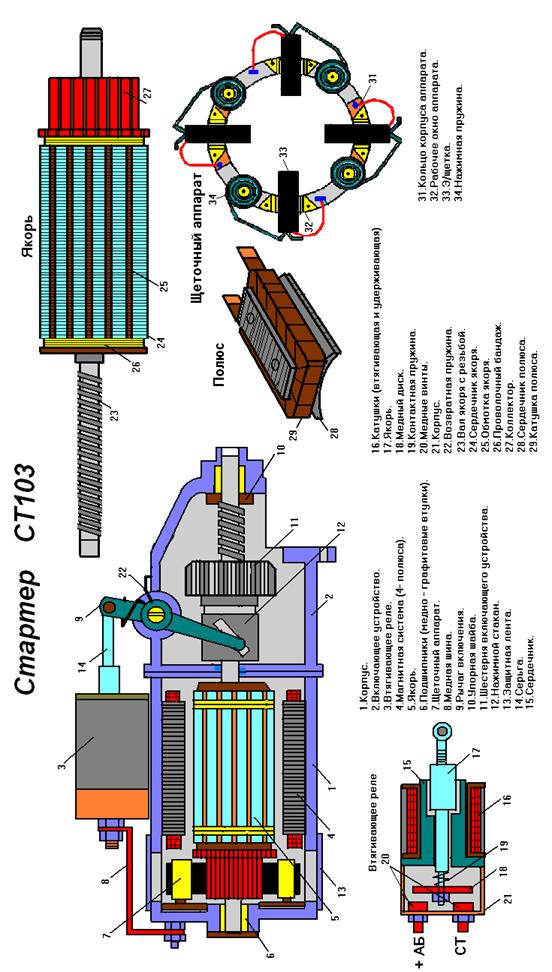
Регулировка момента включения стартера.
|
|
|
|
Переместить якорь тягового реле внутрь корпуса до отказа, при этом зазор между шестерней 11 и упорным кольцом 10 должен быть 11,7 – 16 мм. Если зазор будет больше или меньше необходимо произвести регулировку. Вскрыть крышку контактов тягового реле, зачистить контакты, после чего поставить крышку на место. Отсоединить якорь реле 17 от серьги 14 привода рычага. Если зазор при измерении был больше, то необходимо ввернуть регулировочный винт серьги 14 в якорь реле, если зазор был малым – вывернуть регулировочный винт серьги 14 из якоря реле 17.
| Причина неисправности | Способ устранения | |
| При включении стартера якорь не вращается | ||
| Нарушение контакта щеток с коллектором. Отсутствие контакта в тяговом реле стартера. Обрыв соединений внутри стартера или в тяговом реле. Заедание якоря реле во втулках катушки электромагнита. | Снять стартер с двигателя и разобрать его. При необходимости зачистить и проточить коллектор, заменить щетки. Отсоединить провод от стартера, отпаять вывод от катушки и снять крышку с клеммами. Если контакты подгорели, зачистить их. Отремонтировать стартер или заменить его. Очистить от грязи якорь, реле и втулку. | |
| При включении стартера коленчатый вал двигателя не вращается или вращается с малой частотой, накал ламп освещения становится слабым. | ||
| Разряжена или неисправна аккумуляторная батарея. Короткое замыкание обмотки якоря или обмоток возбуждения. Нарушение контакта в цепи питания стартера вследствие коррозии или слабой затяжки наконечников проводов. Заедание якоря стартера за полюсы. | Проверить батарею, зарядить или заменить ее. Заменить якорь или обмотки возбуждения. Осмотреть цепи питания стартера, зачистить и затянуть гайки наконечников проводов на клеммах. Заменить стартер или заменить втулки (подшипники) вала якоря. | |
| При включении стартера слышен скрежет шестерни стартера, которая не входит в зацепление с зубчатым венцом маховика. | ||
| Забоины на зубьях обода маховика. Ослабление буферной пружины привода стартера. | Устранить забоины правкой поврежденных зубьев. Заменить пружину. | |
| При включении стартера слышен повторяющийся стук тягового реле и шестерни о зубчатый обод маховика. Коленчатый вал двигателя при этом не вращается. | ||
| Отсутствие надежного контакта между клеммами и наконечниками проводов, особенно у аккумулятора. Разряжена или неисправна аккумуляторная батарея. Неисправна обмотка тягового реле или плохой ее контакт с массой. | Проверить и подтянуть крепление наконечников проводов на клеммах. Проверить и подзарядить батарею или заменить ее. Заменить обмотку или припаять вывод обмотки к «массе». | |
| После пуска двигателя стартер не выключается. | ||
| Спекание контактов выключателя тягового реле. Заедание шестерни привода на валу якоря стартера. Межвитковое замыкание в обмотке тягового реле стартера. | Немедленно остановить двигатель, отключить аккумуляторную батарею, снять и отремонтировать реле. Разобрать стартер и установить причину заедания. Заменить реле. | |
|
|
|
-118-

-119-
Ограничение крайних максимальных положений механизма сдвига производится конечными выключателями ВК47 и ВК48. Для коммутации цепями управления в схему включены два промежуточных реле Р22 и Р23. Защита механизма сдвига от короткого замыкания и перегрузки осуществляется предохранителем ПБ15.
6.При работе машины в кривых и переходных кривых база машины смещается относительно оси пути, при этом необходимо производить сдвиг уплотнительных плит. Эту функцию выполняет автомат повторителя сдвига уплотнительных плит. В состав системы повторителя входит сельсин датчик С21, который крепится на балке путевых подъемных магнитов и сельсин приемник С22, который крепится на ферме машины. Сельсин датчик через трособлочную передачу связан с фермой машины. Сельсин приемник через трособлочную передачу связан с поворотными колонами уплотнительных плит. При входе в кривой участок пути подъемные магниты смещаются относительно фермы машины и ротор сельсина С21 поворачивается, сельсин приемнике С22 появляется сигнал рассогласования, который поступает на электронный усилитель У4. На выходе усилителя включено поляризованное реле, которое в зависимости от полярности сигнала замыкает средний подвижный контакт с правым или левым неподвижным контактом. В результате замыкания контактов поляризованного реле включаются промежуточные реле Р22 или Р23, которые своими контактами отключают тормозную муфту ЭМ29 реверс редуктора и включают муфты реверса ЭМ27 или ЭМ28, уплотнительная плита начинает сдвигаться. При этом через трособлочную передачу поворачивается ротор сельсин приемника С22 и сигнал рассогласования начинает уменьшаться. Как только угол поворота сельсин датчика С21 станет равен углу поворота ротора сельсин приемника С22, поляризованное реле выключится и отключит муфты реверса ЭМ27 или ЭМ28, а включится тормозная муфта ЭМ29, сдвиг плиты прекратится. Этот процесс будет происходить каждый раз, как только будет меняться положение магнитов относительно фермы машины.
|
|
|
Для управления правой уплотнительной плитой предусматривается аналогичное электрическое оборудование.
МИКРОСХЕМЫ
Вся современная схемотехника разделяется на две большие области: аналоговую и цифровую. Аналоговая схемотехника характеризуется максимальным быстродействием, малым потреблением энергии и малой стабильностью параметров. Цифровая схемотехника обладает прекрасной повторяемостью параметров. Это привело к её развитию в последние годы. В результате в ряде устройств потребление цифровых модулей оказалось сравнимым и даже меньше потребления аналоговых схем, реализующих те же функции. Основные направления развития цифровых микросхем в настоящее время приведены на рисунке 1.1
|
|
|

Рисунок 1.1 Классификация видов цифровых микросхем
Для того, чтобы лучше понимать особенности работы цифровых микросхем в данном курсе мы кратко повторим особенности основных технологий производства цифровых микросхем, применяемых в настоящее время: ТТЛ, и КМОП,
По мере развития цифровых микросхем их быстродействие достигло впечатляющих результатов. Наиболее быстрые из цифровых микросхем обладают скоростью переключения порядка 3..5 нс. (серия микросхем 74ALS), а внутри кристалла микросхемы, где нет больших ёмкостей нагрузки время переключения измеряется пикосекундами. Таким быстродействием обладают программируемые логические схемы и заказные БИС. В этих микросхемах алгоритм решаемой задачи заключён в их принципиальной схеме.
Часто для решаемой задачи не требуется такого быстродействия, каким обладают современные цифровые микросхемы. Однако за быстродействие приходится платить:
1. Быстродействующие микросхемы потребляют значительный ток.
2. Для решения задачи приходится использовать много микросхем, это выливается в стоимость и габариты устройства.
Первую задачу решает применение технологии КМОП цифровых микросхем (например микросхемы серий 1564, 74HC, 74AHC). Потребляемый ими ток зависит от скорости переключения логических вентилей. Именно поэтому в настоящее время подавляющее большинство микросхем выпускается именно по этой технологии.
Вторую задачу решают несколькими способами. Для жёсткой логики это разработка специализированных БИС. Использование специализированных БИС позволяет уменьшить габариты устройства, но стоимость его снижается только при крупносерийном производстве. Для среднего и малого объёмов производства такое решение неприемлемо.
Ещё одним решением уменьшения габаритов и стоимости устройства является применение программируемых логических схем (ПЛИС). Это направление активно развивается в настоящее время.
Глава 2
|
|
|
