 |


Список использованных источников
|
|
|
|
Содержание
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| Разраб. |
| Кащеевв Е.В. |
| Провер. |
| Архипенко М.Ю.. |
| Реценз. |
| Н. Контр. |
| Утверд. |
| Лит. |
| Листов |
| СибАДИ гр. СМ -09Т1 |
Структурный анализ механизма 4
Кинематический расчет механизма для рабочего хода
Определение скоростей звеньев механизма 5
Определение ускорений звеньев механизма 6
Кинематический расчет механизма для холостого хода
Определение скоростей звеньев механизма 7
Определение ускорений звеньев механизма 8
Кинетостатический расчёт механизма для рабочего хода
Определение реакций в кинематических парах группы 5 -6 9
Определение реакций в кинематических парах группы 3 -4 11
Определение реакций в кинематических парах группы 1 -2 12
Кинетостатический расчет механизма пресса для холостого хода
Определение реакций в кинематических парах группы 5 -6 15
Определение реакций в кинематических парах группы 3 -4 16
Определение реакций в кинематических парах группы 1 -2 17
Вывод 18
Список литературы 19
СТРУКТУРНЫЙ АНАЛИЗ
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Цель: Изучить строения механизмов, определить их степень подвижности и класс.
1) Число подвижных звеньев n =5
2) Степень подвижности


3) За начальное звено принимаем звено 2

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
КИНЕМАТИЧЕСКИbЙ РАСЧЕТ
План скоростей
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |

 - масштабный коэффициент
- масштабный коэффициент

Угловая скорость ω2 кривошипа определяется по формуле:
|
|
|
ω =  ,
,

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Для определения истинных величин скоростей нужно умножить на масштабный коэффициент:
| № положений | ω | VC | VB | VE | ω2 |
| 0,60 | 0,50 | 0,10 | 2,06 |
План ускорений
 Векторное равенство:
Векторное равенство:
 ,
,  -абсолютное ускорение точки;
-абсолютное ускорение точки;

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Масштабный коэффициент:


| № положений | φ° | 
| 
| 
| 
|
| 0.98 | 0.90 | 0.34 | 0.50 |
ХОЛОСТОЙ ХОД
СКОРОСТЬ:
Для определения истинных величин скоростей нужно умножить на масштабный коэффициент:
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| № положений | ω | VC | VB | VE | ω2 |
| 0,80 | 0,50 | 0,54 | 2,06 |
УСКОРЕНИЕ:
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Для определения истинных величин скоростей нужно умножить на масштабный коэффициент:

| № положений | φ° |
|
|
|
|
| 0.50 | 0.45 | 1.05 | 0.50 |
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Рабочий ход
Определение реакций в кинематических парах группы 5 – 6.
Рассматриваем равновесие группы

G5- сила тяжести поршня звена 5,


G6 – сила тяжести ползуна 6,


Pи6 –сила инерции ползуна, где
Pc-сила сопротивления.
 Pи6 – сила инерции шатуна
Pи6 – сила инерции шатуна
Кроме силы на шатун действует еще и момент сил инерции

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
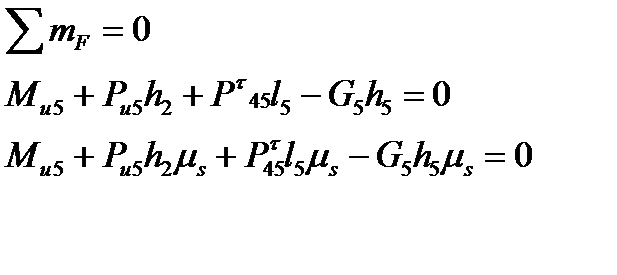 Тангенциальная составляющая Р45 определяется из суммы моментов сил, действующих на шатун относительно точки F.
Тангенциальная составляющая Р45 определяется из суммы моментов сил, действующих на шатун относительно точки F.

h2=46 h1=100

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
|
|
|

G3 – сила тяжести кулисы;

Р14 – реакция стойки на кулису;
Ри3- сила инерции кулисы


Определение реакций в кинематических парах исходного механизма группы 1 – 2.
Рассмотрим равновесие:

Р32 – реакция ползуна на кривошип. Пo величине равна Р23 и противоположена по направлению.
G2 – сила тяжести кривошипного колеса

Р12 – реакция стойки на кривошип.
Рур – уравновешивающая сила – реакция зуба отброшенной шестерни с числом зубцов Z.
h1=20, h=24

Уравновешивающий момент можно определить по уравновешивающей силе.

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |

| № положений | Р12 | Р14 | Р45 | Р23 | Рур | Мур | Р16 |
| 12,8 | 28,4 | 154,5 | 128,75 | 24,4 |
Холостой ход
Определение реакций в кинематических парах группы 5 -6.




| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |


Определение реакций в кинематических парах группы 3-4.

h2=50 h1=44 h=26

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |

Определение реакций в кинематических парах исходного механизма 1 -2.
h=10 h1=25


| № положений | Р12 | Р14 | Р45 | Р23 | Рур | Р16 |
| 7,4 | 154,5 | 61,8 | 44.2 |
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Вывод:
В ходе выполнения курсового проекта был проведен кинематический анализ механизма и построены планы скоростей и ускорений для рабочего и холостого хода механизма (2 и 10 положений).
В результате кинетостатического расчета были получены значения реакций кинематических парах и уравновешивающей силы для рабочего и холостого хода механизма (2 и 10 положений).
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Список использованных источников
1. Артоболевский И.И. Теория механизмов. – М.:Наука,1965- 520с. 2. Динамика рычажных механизмов. Ч.1. Кинематический расчет механизмов: Методические указания/Сост.: Л.Е.Белов, Л.С. Столярова. – Омск: СибАДИ,1996-р 40с.
3. Динамика рычажных механизмов. Ч.2. Кинетостатика: Методические указания/е Сост.: Л.Е.Белов, Л.С. Столярова. – Омск: СибАДИ,1996-24с.
|
|
|
4. Динамика рычажных механизмов. Ч.3. Примеры кинетостатического расчета: Методические указания/Сост.: Л.Е.Белов, Л.С. Столярова. – Омск: СибАДИ,1996-т 44с.
5. Динамика рычажных механизмов. Ч.4. Примеры расчета:
Методические указания/Сост.: Л.Е.Белов, Л.С. Столярова. – Омск:
СибАДИ,1996-56с.
6. Архипенко М.Ю.Теория механизмов и машин: конспект лекций. Омск: СибАДИ,2011-40с.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ
БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«Сибирская автомобильно-дорожная академия»
(СибАДИ)
Кафедра: «Прикладной механики»
Курсовой проект по дисциплине
«Теория механизмов и машин»
Тема: «исследование плоских механизмов»
Вариант № 5
Выполнил студент группы CM - 09Т1: Кащеев Е.В..
Проверила: Архипенко М.Ю
Курсовой проект защищён
«__»_____________2011 г.
Оценка__________
Oмск 2011
|
|
|
