 |


Короткі теоретичні відомості. Приклад програми для лабораторної роботи №3. Варіанти індивідуальних завдань. Лабораторна робода №4. Робода з енкодером. Опитування дискретних давачів
|
|
|
|
Короткі теоретичні відомості
Динамічна знакосинтезуюча індикація реалізована на світлодіодній матриці 5х7 і дозволяє вивести довільний символ, організувати біжучу стрічку та ін. Зміст динамічної індикації полягає у тому, щоби по черзі засвічувати елементи індикатора з такою частотою, при якій око за рахунок деякої інерційності сприйняття не спроможне помітити мерехтіння. Максимум частоти переключення обмежений необхідністю забезпечити такий час світіння елемента, при якому значно не зменшується його яскравість. Елементи індикатора засвічуються записом логічних нулів у відповідні розряди регістру рядків, який підключений до катодів індикатора (на схемі – DD17, адрес регістра 05h) і логічних одиниць у розряди регістру стовбців, підключеного до анодів (на схемі – DD18, адрес регістра 06h). Є зміст виводити знак на індикацію не по елементах (точках), а по рядках. В такому випадку, для того, щоб засвітити у верхньому рядку першу і четверту точку, потрібно в регістр DD17 записати число 11111110b, а в регістр DD18 – число 00001001b.
Приклад програми для лабораторної роботи №3
Засвітити на матриці світлодіодів літеру “S”.
dat Equ R0
adr Equ R1
Temp1 Equ R2
Temp2 Equ R3
stec Equ 0x02
Org 0x000
run:
mov dat, #10111110b
mov adr, #00000101b
call writ
; call delay
mov dat, #00001110b
mov adr, #00000110b
call writ
; call delay
call off
mov dat, #11011101b
mov adr, #00000101b
call writ
; call delay
mov dat, #00010001b
mov adr, #00000110b
call writ
; call delay
call off
mov dat, #11111011b
mov adr, #00000101b
call writ
; call delay
mov dat, #00010000b
mov adr, #00000110b
call writ
; call delay
call off
mov dat, #11101111b
mov adr, #00000101b
call writ
; call delay
mov dat, #00000001b
mov adr, #00000110b
call writ
; call delay
call off
mov dat, #11110111b
mov adr, #00000101b
|
|
|
call writ
; call delay
mov dat, #00001110b
mov adr, #00000110b
call writ
; call delay
call off
jmp run
Writ:
setb P3. 6
mov P0, dat
mov P2, adr
nop
nop
mov P2, #0x00
ret
Delay:
mov Temp1, #0xFF
loop:
dec Temp1
mov Temp2, #0xFF
djnz Temp2, $
cjne Temp1, #0x00, loop
ret
off:
mov dat, #11111111b
mov adr, #00000101b
call writ
; call Ldelay
mov dat, #00000000b
mov adr, #00000110b
call writ
; call Ldelay
ret
Ldelay:
call delay
call delay
call delay
call delay
call delay
call delay
call delay
call delay
call delay
call delay
RET
end1:
END
Варіанти індивідуальних завдань
| № | Текст індивідуального завдання |
| На матричний світлодіодний індикатор засвічувати 4 символи, період світіння 1с. |
Лабораторна робода №4. Робода з енкодером. Опитування дискретних давачів
Тема:. Робода з енкодером. Опитування дискретних давачів.
Мета: Вивчити принцип роботи енкодера, здійснити оптування дискретних давачів, ознайомитися з системою переривання контроллера.
Порядок виконання роботи:
1. Вивчити принцип роботи енкодера, ознайомитися з сиситемою переривання контролера на основі дискретних давачів.
2. Розробити алгоритм індивідуального завдання до початку заняття.
3. Розробити програму і скомпілювати її.
5. Завантажити програму в стенд, переконатись в правильності її роботи, при негативному результаті виявити допущені помилки і виправити їх. Повторити завантаження програми в стенд.

Рисунок 4. 1 – Схема для лабораторної роботи №5
Короткі теоретичні відомості
Для введення інформації широко застосовуються кнопкові перемикачі. Сигнал таких перемикачів формується шляхом замикання (розмикання) електричного кола.
В стенді встановлено дві дискретні кнопки K_En I K_J, які під’єднані до входів зовнішніх переривань контролера відповідно до INT0 i INT1. Опитування даних давачів можна здійснювати як з використаннях переривань так і способом опитування стану окремого виводу потра контролера.
|
|
|
Також для введеня інформації використовується механічний енкодер E1.
Енкодер (датчик кута або перетворювач кут-код) – пристрій, який призначений для перетворення кута повороту обертового об’єкта (вала) в електричні сигнали, які дозволяють визначити кут його повороту.
Енкодери розділяються на інкременті і абсолютні, які можуть забезпечити дуже високу роздільну здатність. В інкрементних датчиках кутового положення поточне положення визначється шляхом підрахунку числа імпульсів від нульової точки.
На виході енкодера є два прямокутних сигнали, які зсунуті відносно один одного, в даному випадку на 900 (рисунок 4. 2).
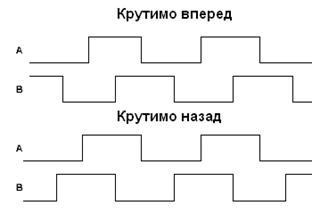
Рисунок 4. 2 – Сигнали на виході енкодара
По характеру зсуву можна визначити напрамок обертання ручки вала енкодера. Розрізняється такоє кількість імпульсів на оберт, для даного типу енкодера – 20.
|
|
|
