 |


Порядок расчета индуктивного преобразователя с П-образным и Ш-образным сердечником и плоским якорем
|
|
|
|
Расчет преобразователя с П-образным сердечником (рисунок 4, а) является частным случаем расчета преобразователя с Ш-образным сердечником (рисунок 5, а), поэтому будем рассматривать только последний.
Магнитная цепь (рисунок 5, б) обычно выполняется симметричной относительно среднего сердечника, на котором расположена катушка (изображена жирными линиями). Поэтому достаточно рассчитать одну её половину, уменьшив сечение среднего сердечника вдвое и сохранять ту же величину намагничивающей силы катушки.
Изложение принципов расчета данного индуктивного преобразователя будет проводить совместно с решением конкретного примера.
Исходные данные примера:
- из заданных габаритов имеем (рисунок 5, а) a = f = t = b = 5мм = 5x10-3м; c= 16мм = 16x10-3м; h = 30мм = 30x10-3м;
- предел измерения Δd = 0,2 мм = 0,2 x10-3м;
- измерительное усилие не более 3 Н;
- передаточное отношение 500 ÷ 800 см/мм;
- частота питающего напряжения 50 Гц.
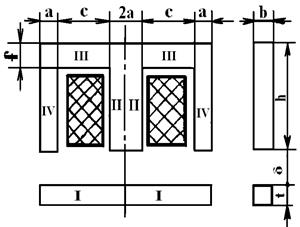

Рисунок 5 – Индуктивный преобразователь с Ш-образным сердечником
1. Согласно выражения (3) определяем количество витков катушки, предварительно задавшись:
dt = 0,2 мм=0,2 x10-3м; провод марки ПЭВ-2;
f0 = 0,55 (таблица 1); толщина стенок каркаса катушки 1,5 мм.
 витков.
витков.
2. Согласно выражения (4) определяем начальный зазор, мм:
 ,
,
 .
.
3. Задаемся величиной индукции в среднем сердечнике согласно (6) – BII=0,2 Тл.
При расчете магнитной цепи удобно использовать схемы замещения. Схема замещения (рисунок 6) составляется сообразно конфигурации магнитопровода. Все участки магнитных сопротивлений цепи на схеме обозначены сосредоточенными магнитными сопротивлениями, а ЭДС катушки К показана как источник потока.
Так как рассматриваемая цепь симметрична, мы условно примем, что магнитное сопротивление среднего сердечника состоит из двух равных параллельно включенных сопротивления сердечника ZMII и двух равных сопротивлений воздушных зазоров RdII.
|
|
|

Рисунок 6 – Схема замещения
Для любой половины магнитопровода полное магнитное сопротивление цепи  будет равно сумме сопротивлений остальных участков цепи ZMi и сумме сопротивлений двух воздушных зазоров Rdi:
будет равно сумме сопротивлений остальных участков цепи ZMi и сумме сопротивлений двух воздушных зазоров Rdi:
 . (8)
. (8)
Суммарное магнитное сопротивление ввей цепи будет равно:
 . (9)
. (9)
Общий магнитный поток FS, создаваемый катушкой преобразователя будет равен
FS = F1 + F2 = 2F1, (10)
где F1(2 ) – магнитный поток правой или левой половины магнитопровода, Вб.
4. Определение магнитного сопротивления воздушных зазоров.
При расчетах обычно пользуются магнитной проводимостью воздушных зазоров, величиной обратной сопротивлению
Точность расчета преобразователя в основном определяется точностью определения проводимости воздушных зазоров.
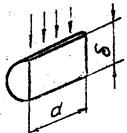
Магнитное поле в зазоре не является плоскопараллельным, магнитный поток выпучивается из-под полюсов. Поэтому для расчета проводимости воздушного зазора применяют метод разбивки (метод Ротерса) магнитного поля на простые геометрические фигуры, проводимость которых затем и определяется по известным формулам, приведенным в таблице 3.
В нашем случае поле разбивается на восемь простых фигур (рисунок 5, б).
Координаты поля выпучивания X¢, X¢¢, Z¢a, Z¢¢a, Z¢b, Z¢¢b определяется по графику на рисунке 7 и ниже приведенным рекомендациям.

Рисунок 7 – Координаты поля выпучивания
Координата X¢ обычно принимается равной 
 .
.
Из рисунка 7 по известной величине  определяем
определяем  . Расчет удобно начинать с максимальной величины воздушного зазора
. Расчет удобно начинать с максимальной величины воздушного зазора  при которой ток проходящий через катушку преобразователя имеет наибольшее значение. И если при этих условиях определить параметры катушки, то плотность тока, в процессе работы преобразователя, не превысит расчетной величины.
при которой ток проходящий через катушку преобразователя имеет наибольшее значение. И если при этих условиях определить параметры катушки, то плотность тока, в процессе работы преобразователя, не превысит расчетной величины.
|
|
|
 ;
;
 ;
;  .
.
С достаточной для практики точностью рекомендуется принимать
 .
.
По известной величине  и по графику на рисунке 7 определяем
и по графику на рисунке 7 определяем  .
.

 , м.
, м.
Далее определяется по формулам таблицы 3 проводимости отдельных фигур.
5. Проводимость половины полого цилиндра G (фигура 2, рисунок 5, б). Таких фигур в зазоре dII две штуки, а в зазоре dIV три штуки.

где m1 – средняя толщина стенки цилиндра равная
 .
.
Таблица 3 – Основные фигуры аналитическое выражение их магнитных проводимостей.
| Эскиз фигуры | Формула магнитной проводимости |

| 
|
 Полуцилиндр
Полуцилиндр
| 
|
 Четверть цилиндра
Четверть цилиндра
| 
|
Продолжение таблицы 3
 Половина полого цилиндра
Половина полого цилиндра
| 

|
 Четверть полого цилиндра
Четверть полого цилиндра
| 

|
 Сферический квадрант
Сферический квадрант
| 
|
 Половина сферического квадранта
Половина сферического квадранта
| 
|
 Квадрант сферической оболочки
Квадрант сферической оболочки
| 

|
 Половина квадранта сферической оболочки
Половина квадранта сферической оболочки
| 
|
Продолжение таблицы 3
 Тело вращения (полуцилиндр)
Тело вращения (полуцилиндр)
| 
|
 Тело вращения (полукольцо)
Тело вращения (полукольцо)
| 

|
6. Проводимость половины цилиндра (фигура 2). Для зазора dIV имеется три таких фигуры, а для dII две. Тогда:
 .
.
7. Проводимость квадранта полого шара (фигура 3). Только у зазора dIV, имеется две таких фигуры. Тогда:
 .
.
8. Проводимость шарового квадранта (фигура 4). Две таких фигуры только у зазора dIV, значит:
 .
.
9. Проводимость зазора под полюсами (фигура 5) по одной фигуре у каждого полюса
 .
.
10.Проводимость четверть цилиндра (фигура 6). По одной фигуре у каждого зазора:
 .
.
11. Проводимость четверть полого цилиндра (фигура 7). По одной фигуре у каждого зазора:
где 

12. Проводимость G8 квадрантов сложной формы заключенных между фигурами 6,7 и 1,2 рекомендуется принимать
 .
.
Общая магнитная проводимость воздушных зазоров определится как сумма их составляющих.
Для зазора  :
:
 =
=  +
+  +
+ 
 , (11)
, (11)
где  Гн/м.
Гн/м.
После подстановки получаем:

 Гн.
Гн.
Сопротивление:  1/Гн.
1/Гн.
Для зазора  :
:

 , (12)
, (12)
После подстановки получаем:
 Гн.
Гн.
Сопротивление этого зазора:
 1/Гн.
1/Гн.
13. Определение магнитного сопротивления стальных участков цепи.
Комплексное сопротивление стального сердечника определяется по формуле:
 ,
,
где  – удельное реактивное и активное магнитное сопротивление, м/Гн; определяется по экспериментальным графикам (рисунок 8) в зависимости от величины магнитной индукции Вi;
– удельное реактивное и активное магнитное сопротивление, м/Гн; определяется по экспериментальным графикам (рисунок 8) в зависимости от величины магнитной индукции Вi;
|
|
|
li, Si – средняя длина и поперечное сечение i-того сердечника.
Для нашего случая магнитная индукция в среднем сердечнике B =0,2 Тл, а его магнитный поток составляет:  Вб.
Вб.
Следовательно:  Вб.
Вб.
По потоку Ф1 определяют величины индукции в каждом звене магнитопровода.
Так как поперечное сечение звеньев I, III, IV равны (5х5), то и величины индукции этих звеньев будут также равны:
 Тл.
Тл.
Для этого значения индукции по графикам 8 (рисунок 8, б) для стали Э-12 определяем:
 м/Гн,
м/Гн,  м/Гн,
м/Гн,


 =(14,4+j3,3)
=(14,4+j3,3)  1/Гн.
1/Гн. 
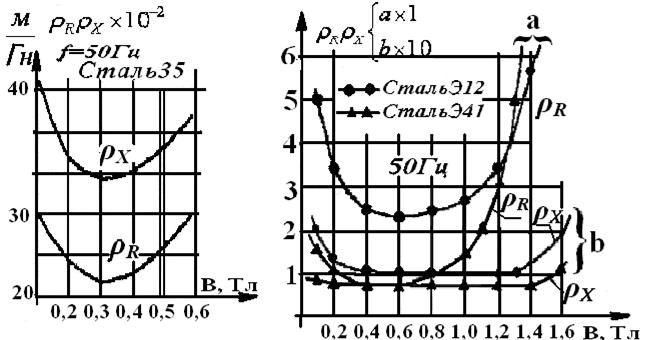
Рисунок 8 – Экспериментальные графики для определения
Суммарное магнитное сопротивление одной половины магнитной цепи преобразователя:

=  1/Гн. (13)
1/Гн. (13)
Суммарное магнитное сопротивление всей цепи составит:
 1/Гн. (14)
1/Гн. (14)
Модуль этого сопротивления:
 1/Гн.
1/Гн.
Полное комплексное электрическое сопротивление катушки преобразователя определяется из следующей формулы:
 , (15)
, (15)
где  – активное сопротивление преобразователя из-за потерь в стали на
– активное сопротивление преобразователя из-за потерь в стали на
гистерезис и вихревые токи, Ом;
 – реактивное индуктивное сопротивление катушки, Ом,
– реактивное индуктивное сопротивление катушки, Ом,  1/Гн;
1/Гн;
 – круговая частота, где f0 – частота в герцах. Для нашего случая
– круговая частота, где f0 – частота в герцах. Для нашего случая  ;
;
Ra – активное сопротивление катушки преобразователя, равное
 , (16)
, (16)
где ρ – удельное сопротивление для медной проволоки ( Ом×мм2/м);
Ом×мм2/м);
lср – средняя длина витка (м) (рисунок 9);

Рисунок 9 – Вид преобразователя с Ш-образным сердечником
q – поперечное сечение полого провода (таблица 2).
 Ом.
Ом.
Откуда модуль сопротивления по формуле (15):
 .
.
Эффективное значение тока, протекающего через катушку преобразователя для создания выбранного магнитного потока будет равно
 А.
А.
Плотность тока в обмотке:
 А/мм2,
А/мм2,  А/мм2.
А/мм2.
Напряжение питания катушки будет равно
 В.
В.
Для приближённого определения передаточного отношения преобразователя и определения измерительного усилия необходимо определить полное сопротивление магнитной цепи и полное сопротивление катушки при наименьшем зазоре  :
:
 мм.
мм.
При выполнении повторного расчёта при зазоре сопротивления остальных участков будем считать неизменными. Для этих условий  м;
м;  м;
м;  м;
м;  м.
м.
|
|
|
Согласно формул (11) и (12) получим:
 Гн;
Гн;
 1/Гн;
1/Гн;
 Гн;
Гн;
 1/Гн.
1/Гн.
Суммарное магнитное сопротивление одной половины цепи согласно (13) равно
 1/Гн,
1/Гн,
а сопротивление всей цепи согласно (14) равно
 1/Гн.
1/Гн.
Модуль этого сопротивления:
 1/Гн.
1/Гн.
Наконец, согласно с формулой (15) получим модуль полного электрического сопротивления катушки:  Ом.
Ом.
Таким образом, при изменении зазора между якорем и неподвижным сердечником на величину 0,2 мм сопротивление катушки изменилось на 160 Ом. Считая, что передаточное отношение Кип на всём пределе измерения постоянно, определим его значение:
 Ом/мм.
Ом/мм.
Для построения характеристики преобразователя  определяются для нескольких значений (в пределах рабочего хода якоря) величины сопротивлений преобразователя.
определяются для нескольких значений (в пределах рабочего хода якоря) величины сопротивлений преобразователя.
Измерительное усилие Fиз преобразователя определяется, исходя из величины максимальной электромеханической силы притяжения Fэ якоря к сердечнику, которая определяется по приближённой формуле, полученной из формулы Максвелла. Для недифференциального преобразователя сила притяжения одного полюса равна:
Ом/мм. Ошибка! Ошибка связи. (17)
Эта формула справедлива для определения величины электромагнитной силы действующей между двумя параллельными плоскостями, находящимися на небольшом расстоянии (1-2мм).
У дифференциального преобразователя на якорь действует разность сил, направленная в сторону меньшего зазора и равная
 . (18)
. (18)
Для нашего примера (дифференциальный преобразователь) на одну пару полюсов разность составит:
 Н.
Н.
Для 4-х полюсов:  Н.
Н.
Измерительное усилие Fиз преобразователя должно быть больше электромеханической силы в 5-10 раз. Примем его равным 3Н.
|
|
|
