 |


Датчик давления Метран-100
|
|
|
|
ИССЛЕДОВАНИЕ РАБОТЫ КОММУНИКАТОРА МАТРАН-650 В КОМПЛЕКТЕ С ИНТЕЛЛЕКТУАЛЬНЫМ ДАТЧИКОМ ДАВЛЕНИЯ МЕТРАН-100
Методические указания к лабораторной работе
Издательство
Пермского государственного технического университета
Составитель д-р техн. наук, проф. М.К. Хубеев, Сташков С.И., Орехов М.С.
УДК 621.5
А
Рецензент
канд. техн. наук, проф. каф. АТП Б.Г. Стафейчук
(Пермский государственный технический университет)
Исследование работы коммуникатора матран-650 в комплекте с интеллектуальным датчиком давлени метран-100
|
Приведен материал, необходимый для выполнения лабораторных работ по дисциплинам «Технологические измерения и приборы» и «Системы управления химико-технологическими процессами». Содержание методических указаний соответствует требованиям государственного образовательного стандарта высшего профессионального образования.
Предназначено для студентов, обучающихся по специальностям «Автоматизация технологических процессов», «Компьютерные системы управления качеством», «Технология неорганических веществ», «Химическая технология топлива», «Химическая технология и биотехнология», «Машины и аппараты химических производств» очной и заочной форм обучения.
УДК 621.5
© ГОУ ВПО
«Пермский государственный
технический университет», 2010
Введение
В настоящем методическом указании к лабораторной работе рассмотрены устройство и принцип работы датчика давления Метран-100 и коммуникатора Метран-650. Изложены практические рекомендации по конфигурированию, калибровке и наладке датчика разности давлений Метран-100-ДД модели 1422 при помощи коммуникатора Метран-650.
|
|
|
Теоретические сведения
Датчик давления Метран-100
1.1.1. Общие данные
Датчик Метран-100 (в дальнейшем датчик), представленный на рис. 1, предназначен для работы в системах автоматического контроля, регулирования и управления технологическими процессами и обеспечивают непрерывное преобразование измеряемых величин – давления избыточного, абсолютного, разряжения, давления-разряжения, разности давлений (Метран-100-ДД модель 1422), гидростатического давления нейтральных и агрессивных сред в унифицированный токовый выходной сигнал дистанционной передачи, цифровой сигнал на базе интерфейса RS-485 с протоколом обмена ICP или Modbus.

| Рис. 1. Датчик давления Метран-100 |
Датчик предназначен для работы со вторичной регистрирующей и показывающей аппаратурой, регуляторами и другими устройствами автоматики, машинами централизованного контроля и системами управления, воспринимающими стандартные сигналы постоянного тока 0-5 или 0-20 или 4-20 мА, цифрового сигнала на базе HART-протокола и цифрового сигнала на базе интерфейса RS-485 с протоколом обмена ICP или Modbus.
Датчик с HART-протоколом может передавать информацию об измеряемой величине в цифровом виде по двухпроводной линии связи вместе с сигналом постоянного тока 4-20 мА. Таким образом, по двухпроводной связи передается два типа сигналов – аналоговый сигнал 4-20 мА и цифровой сигнал на базе протокола HART, который накладывается на аналоговый выход сигнала датчика, не оказывая на него влияния. Этот цифровой сигнал может приниматься и обрабатываться любым устройством, поддерживающим протокол HART. Цифровой выход используется для связи датчика с портативным ручным HART-коммуникатором или с персональным компьютером через стандартный последовательный порт и дополнительный HART-модем. Может выполняться настройка датчика, выбор его основных параметров, перестройка диапазонов измерений, корректировка «нуля» и ряд других операций. HART-протокол допускает в системе наличие двух управляющих устройств: системы управления и ручного коммуникатора. Эти два управляющих устройства имеют разные адреса и, следовательно, Метран-100 может распознать и выполнить команды каждого из них.
|
|
|
Датчики Метран-100 имеют линейно-возрастающую или линейно-убывающую зависимость аналогового выходного сигнала от входной измеряемой величины (давления).
Датчики разности давлений Метран-100-ДД, предназначенные для измерения расхода жидкости, газа или пара по величине переменного перепада давления на сужающем устройстве трубопровода, могут иметь зависимость аналогового выходного сигнала, пропорциональную квадратному корню из значений входной измеряемой величины – перепада давления.
Номинальная статическая характеристика датчика с линейно-возрастающей зависимостью аналогового выходного сигнала от входной измеряемой величины соответствует виду

где I – текущее значение сигнала;
Р – значение измеряемой величины (разность давлений);
Iв, Iн – соответственно верхнее и нижнее предельные значения выходного сигнала, равные
Iн = 4мА, Iв = 20мА – для датчиков с выходным сигналом 4-20мА;
Iн = 0, Iв = 5мА – для датчиков с выходным сигналом 0-5мА;
Iн = 0, Iв = 20мА – для датчиков с выходным сигналом 0-20мА;
Рв, Рн – соответственно верхний и нижний предел измерений.
Номинальная статическая характеристика датчика с линейно-убывающей зависимостью аналогового выходного сигнала от входной измеряемой величины соответствует виду

Номинальная статическая характеристика датчика с функцией преобразования входной измеряемой величины по закону квадратного корня соответствует виду

где Δ Р – входная измеряемая величина – перепад давления.
На начальном участке характеристики при значениях давления  от Рв представлена кусочно-линейная зависимость в соответствии с рис. 2.
от Рв представлена кусочно-линейная зависимость в соответствии с рис. 2.

|
| Рис. 2. Функция преобразования входной величины по закону квадратного корня |
1.1.2. Устройство и работа датчика
Датчик состоит из преобразователя давления (в дальнейшем – сенсорный блок) и электронного преобразователя. Датчик имеет унифицированный электронный преобразователь.
|
|
|
Измеряемая входная величина подается в камеру сенсорного блока и преобразуется в деформацию чувствительного элемента (тензопреобразователя), вызывая при этом изменение электрического сопротивления его тензорезисторов. Электронный преобразователь датчика преобразует это изменение сопротивления в токовый выходной сигнал.
Чувствительным элементом тензопреобразователя является пластина из монокристаллического сапфира с кремниевыми пленочными тензорезисторами (структура КНС), прочно соединенная с металлической мембраной тензопреобразователя.
Конструкция датчика Метран-100-ДД модели 1422 представлена на рис. 3. Измерительная мембрана 1 приварена по наружному контуру к основанию датчика 2, на котором установлен тензопреобразователь 3, измерительная мембрана и тензопреобразователь защищены от контакта с рабочей средой при помощи двух разделительных мембран 4 и 5, межмембранные полости 6 и 7 заполнены кремнийорганической жидкостью. Наружные фланцы 8 и 9 образуют рабочие камеры датчика 10 и 11, герметизированные при помощи прокладок 12. Под воздействием разности давлений в рабочих камерах датчика происходит перемещение жесткого центра измерительной мембраны, которое передается через гибкую связь 13 к упругому элементу тензопреобразователя, вызывая изменение сопротивлений его тензорезисторов. Электрический сигнал от тензопреобразователя передается через гермоввод 14 по проводам 15 в электронный преобразователь 16.

| Рис. 3. Устройство датчика Метран-100 модель 1422 1 – измерительная мембрана; 2 – основанию датчика; 3 – тензопреобразователь; 4, 5 – разделительные мембраны; 6, 7 – межмембранные полости; 8, 9 – наружные фланцы; 10, 11 – рабочие камеры датчика; 12 – прокладки; 13 – гибкая связь; 14 – гермоввод; 15 – провода; 16 – электронный преобразователь. |
1.1.3. Вентильный блок
Вентильный блок на рис. 4 предназначен для подключения датчиков разности давления Метран-100-ДД к импульсным линиям и уравнивания давлений в измерительных камерах датчика для периодического контроля установки выходного сигнала, соответствующего нулевому значению измеряемого перепада давления.
|
|
|

|
| Рис. 4. Вентильный блок БВН04 |
В конструкции вентильного блока предусмотрены два изолирующих вентиля, показанные на рис. 5; они обеспечивают отсечку каждой из двух импульсных линий в отдельности и уравнивающий вентиль для уравнивания давлений в измерительных камерах датчика.
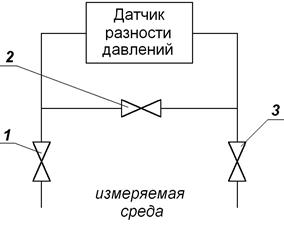
| Рис. 5. Схема подключения БВ к датчику разности давлений 1, 3, – изолирующие вентили; 2 – уравнивающий вентиль. |
Коммуникатор Метран-650
1.2.1. Общие данные
Коммуникатор Метран-650 предназначен для проведения ручной настройки параметров микропроцессорных датчиков, имеющих на основе стандартного токового выхода 4-20 мА цифровой канал с HART-протоколом.
Коммуникатор Метран-650 позволяет использовать возможности датчиков Метран-100 в аналоговых АСУТП, которые не поддерживают протоколы HART. Коммуникатор взаимодействует по протоколу HART, который использует принцип частотной модуляции. HART-составляющая не влияет на сигнал 4-20 мА, т. к. синусоида, формирующая цифровой сигнал, имеет небольшую амплитуду (0,5 мА), а ее среднеквадратичное значение равно нулю.
Коммуникатор обеспечивает настройку параметров микропроцессорных датчиков, поддерживающих HART-протокол.
Отметим, что коммуникатор не является средством измерения и не имеет точностных характеристик.
1.2.2. Технические характеристики
Коммуникатор обеспечивает выдачу и прием HART-сигналов в соответствии с требованиями спецификации физического уровня HCF SPEC-54 для вторичного мастера.
Диапазон частот при передаче «0» от 2178 до 2222 Гц и при передаче «1» от 1188 до 1212 Гц.
Входной импеданс коммуникатора при приеме HART-сигналов не менее 5 кОм.
Выходной импеданс коммуникатора не более 100 Ом.
Коммуникатор обнаруживает HART-сигнал на нагрузке не менее 250 Ом
Коммуникатор обеспечивает непрерывную работу не менее 8 часов без перезарядки встроенного блока аккумуляторов или без замены щелочных батареек.
Коммуникатор имеет габаритные размеры не более 240х110х70 мм.
Масса коммуникатора не более 0,5 кг.
Максимальное входное напряжение постоянного тока цепи «4-20 мА» не более 24 В для взрывозащищенного исполнения и не более 50 В для общепромышленного исполнения.
1.2.3. Устройство коммуникатора
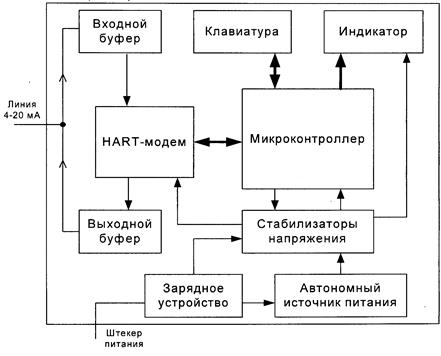
Основной частью коммуникатора является микроконтроллер, представленный на рис. 6. Микроконтроллер осуществляет обработку принятой от микропроцессорных датчиков информации, управляет режимами работы всех остальных частей, следит за состоянием автономного источника питания. Набор команд и управление режимами работы коммуникатора осуществляется при помощи мембранной клавиатуры, соединенной непосредственно с портами микроконтроллера. Информация о режимах работы коммуникатора, параметрах микропроцессорных датчиков отображается на жидкокристаллическом индикаторе.
|
|
|
|
| Рис. 6. Структурная схема коммуникатора |
Входной сигнал HART-протокола подается на входной буфер, представляющий собой дифференциальный усилитель с единичным коэффициентом усиления. Далее сигнал поступает через фильтр на HART-модем (функционально законченная микросхема), преобразующий частотно-модулированный сигнал в цифровой сигнал, обрабатываемый микроконтроллером.
Выходной сигнал формируется также HART-модемом, преобразующим цифровой сигнал микроконтроллера в частотно-манипулированный сигнал, поступающий на выходной буфер.
В выходном буфере HART-сигнал усиливается до требуемой величины и поступает на выход коммуникатора «Линия 4-20 мА».
Питание коммуникатора осуществляется от автономного источника питания, расположенного в отдельном отсеке корпуса. Стабилизаторы напряжений предназначены для создания нужного уровня для питания узлов схемы. Напряжение питания микроконтроллера 3,3 В снимается с отдельного стабилизатора. Микроконтроллер коммуникатора запитан постоянно и переходит в режим низкого потребления при выключении коммуникатора.
Напряжение питания HART-модема подается на микросхему через транзисторный ключ, управляемый микроконтроллером. Напряжения питания индикатора коммуникатора подается с отдельного стабилизатора напряжения, управляемого микроконтроллером.
1.2.4. Использование коммуникатора
Коммуникатор включает в себя жидкокристаллический индикатор и клавиши мембранного исполнения, классифицирующиеся по своему функциональному назначению на несколько видов, как показано на рис. 7.

|
| Рис. 7. Внешний вид коммуникатора |
Жидкокристаллический индикатор имеет 4 строки по 20 символов в каждой строке, что позволяет пользователю обмениваться данными с присоединенным устройством. Индикатор имеет подсветку экрана, включаемую при нажатии клавиши «Подсветка».
Клавиша «ON/OFF» предназначена для включения-выключения питания коммуникатора. После включения питания коммуникатор проводит автоматический контроль напряжения питания. При успешном прохождении этой процедуры запускается самотестирование, в процессе которого коммуникатор производит проверку контрольной памяти ПЗУ, о чем свидетельствует сообщение, представленное на рис. 8 а.
Если коммуникатор прошел самотестирование, то запускается процесс поиска совместимых устройств, подключенных к линии (см. рис. 8 б).
| МЕТРАН НАРТ-КОММУНИКАТОР ВЕРСИЯ-ХХ <САМОТЕСТИРОВАНИЕ> | МЕТРАН НАРТ-КОММУНИКАТОР ВЕРСИЯ-ХХ <ПОИСК ДАТЧИКА> | КОНТРОЛЬНАЯ СУММА ПАМЯТИ ПРОГРАММ НЕ СОВПАДАЕТ <ЛЮБУЮ КЛАВИШУ> | ||
| а | б | в | ||
| Рис. 8. Отображение информации на дисплее коммуникатора |
Коммуникатор имеет функциональные клавиши:
1. Клавиша «Стрелка вверх», необходимая для передвижения курсора вверх по меню или списку вариантов. Она также используется для скроллинга имеющихся знаков при редактировании поля, воспринимающего буквенные и цифровые данные.
2. Клавиша «Стрелка вниз», необходимая для передвижения курсора вниз по меню или списку вариантов. Она также используется для скроллинга имеющихся знаков при редактировании поля, воспринимающего буквенные и цифровые данные.
3. Клавиша «ESC», применяемая для вызова предыдущего меню.
4. Клавиша «ENTER», применяемая для ввода данных пользователя или для выбора пункта меню.
5. Клавиши «F1», «F2» и «F3». Эти клавиши зарезервированы и не выполняют никаких функций.
Коммуникатор имеет алфавитно-цифровые клавиши (см. рис. 7), которые используются для ввода данных. При нажатии из меню редактирования одной алфавитно-цифровой клавиши, на дисплее появится знак, изображенный большим полужирным символом в центре клавиши. Большими символами на клавишах изображены цифры от 0 до 9, десятичная точка (.) и тире (-). Чтобы ввести букву или другой знак, необходимо нажать и отпустить соответствующую клавишу смены регистра, а затем алфавитно-цифровую клавишу.
Примечание: если коммуникатор не прошел самотестирование (см. рис. 8 в), то необходимо провести ручное тестирование коммуникатора. Для этого следует после появления сообщения о том, что HART-совместимое устройство по адресу #0 не найдено (см. рис. 9 а) нажать клавишу «ESC».
| ДАТЧИК ПО АДРЕСУ #0 НЕ НАЙДЕН ПРОДОЛЖИТЬ ПОИСК? <←НЕТ> <ДА┘> | ПОИСК ДАТЧИКА ДЕМОРЕЖИМ ДАТЧИК >КОММУНИКАТОР | ВРЕМЯ И ДАТА КОНТРОЛЬ ПИТАНИЯ >САМОТЕСТИРОВАНИЕ НАСТРОЙКА | ||
| а | б | в | ||
| >ТЕСТ КЛАВИАТУРЫ ТЕСТ ИНДИКАТОРА ТЕСТ МОДЕМА ТЕСТ ПЗУ | ПОДОЖДИТЕ ИДЕТ ПОДСЧЕТ КОНТРОЛЬНОЙ СУММЫ ПАМЯТИ ПРОГРАММ | ОШИБКИ ПЗУ НЕ ОБНАРУЖЕНЫ <ЛЮБУЮ КЛАВИШУ> | ||
| г | д | е | ||
| Рис. 9. Отображение информации на дисплее коммуникатора |
После появление на дисплее коммуникатора основного меню, представленного на рис. 9 б, необходимо при помощи клавиши «Стрелка вниз» выбрать меню КОММУНИКАТОР и нажать клавишу «ENTER» (выбранный пункт индицируется маркером «>» в левом столбце экрана). После входа в меню КОММУНИКАТОР необходимо выбрать пункт САМОТЕСТИРОВАНИЕ в соответствии с рис. 9 в.
В пункте САМОТЕСТИРОВАНИЕ необходимо поочередно выполнить тест по всем меню: ТЕСТ КЛАВИАТУРЫ, ТЕСТ ИНДИКАТОРА, ТЕСТ МОДЕМА, ТЕСТ ПЗУ в соответствии с рис. 9 г. При выполнении пункта ТЕСТ ПЗУ на дисплее коммуникатора появиться соответствующее сообщение (рис. 9 д). Если контрольная сумма памяти программ совпадает с заданной, то на дисплей выводиться окно в соответствии с рис. 9 е.
HART-протокол
Благодаря хорошо настроенной последовательной связи прибор и коммуникатор к нему могут быть расположены на большом расстоянии друг от друга. Эта связь реализована по тем же двум проводам, которые уже используются для соединения первичного прибора с системой управления в центральной комнате управления.
Эти устройства обеспечивают преимущества цифровой связи и в то же время сохраняют совместимость и надежность аналоговых входных сигналов, которые требуются для существующих систем.
Помимо того, что цифровая связь используется для настройки и управления первичными устройствами, оказалось возможным с помощью нее считывать измеряемый параметр. Без всяких изменений эти приборы готовы для применения в цифровых системах.
Использование цифровой связи для считывания измеряемого параметра позволяет одному прибору обрабатывать более одного измерения. Например, расходомер позволяет в одном сообщении считывать весовой расход, температуру и плотность жидкости процесса, а также суммарный весовой расход. Кроме того, можно следить за состоянием первичного прибора каждый раз, когда производится измерение, повышая достоверность и безопасность автоматического управления.
Считывание измеряемого параметра в цифровой форме сохраняет точность за счет устранения процесса цифро-аналогового и аналогово-цифрового преобразования сигнала 4-20 мА. Однако время, затрачиваемое на передачу сообщения, добавляет лишнюю задержку (мертвое время) к измерению, которая может отрицательно повлиять на управление в быстродействующем контуре. Преимуществом HART протокола является то, что в таких ситуациях для целей управления можно по-прежнему использовать аналоговый сигнал.
Цифровая связь позволяет хранить в первичных приборах дополнительную информацию и считывать ее по запросу. Датчик может хранить информацию о процессе, такую как номер тэга и описание измерения, калибровочный диапазон прибора и единицы измерения. Кроме того, он может выдавать информацию о себе самом, выступая в роли электронной «бирки». Более того, его можно использовать для хранения записей о процедурах его обслуживания, например о дате последней калибровки.
Если измеряемая переменная считывается в цифровой форме, аналоговый сигнал 4-20 мА больше не нужен. Поэтому можно подсоединить много первичных устройств к одной паре проводов, а считывать данные с датчика индивидуально. Для этого каждое устройство должно иметь адрес, на который оно будет откликаться, а каждый запрос от системы управления должен содержать этот адрес как часть сообщения.
Это может значительно сократить стоимость проводки к первичным устройствам и интерфейсных электронных модулей ввода в систему управления, а также может быть удобным в следящих системах. Однако, использование циклического сканирования означает, что каждое измерение опрашивается с определенным интервалом времени. Время цикла полного опроса может оказаться слишком большим для быстродействующих контуров управления.
Для эффективного применения дополнительных возможностей цифровой связи для широкого диапазона различных первичных устройств, требуется коммуникационный стандарт. Этот стандарт должен содержать характеристики физической формы передачи, процедуры транзакции, структуру сообщения, формат данных, а также набор команд для выполнения требуемых функций.
HART-протокол первоначально был разработан компанией Rosemount Inc. Для распространения цифровой связи компания RosemounT Inc сделала HART-протокол открытым для пользователей. В настоящее время этот протокол поддерживается независимым некоммерческим Фондом HART-Коммуникаций.
HART-протокол использует стандарт BELL 202 кодировки сигнала методом частотного сдвига (FSK) для обмена данными на скорости 1200 Бод; сигнал накладывается на аналоговый измерительный сигнал 4-20 мА на нижнем уровне.
Каждое сообщение содержит адреса источника и назначения, а также имеет контрольную сумму для обнаружения любого искажения сообщения.
Схема взаимоотношений между узлами сети основана на принципе MASTER-SLAVE. В HART-сети может присутствовать до 2 MASTER-узлов (обычно один). Второй MASTER, как правило, освобожден от поддержания циклов передачи и используется для организации связи с какой-либо системой контроля (отображения) данных.
Это означает, что первичное устройство только отвечает на запросы. Но может оказаться двое главных (система управления и ручной коммуникатор, например). К одной линии моноканала можно подсоединить до 15 подчиненных устройств (в не искро-безопасных приложениях). Состояние первичного устройства передается по мере того, как каждую секунду выполняются две-три транзакции ответного сообщения.
Стандартная топология HART-сети – «звезда», но возможна и шинная организация. Для передачи данных по сети используются два режима:
1) Асинхронный: по схеме "MASTER-запрос, SLAVE-ответ" (один цикл укладывается в 500 мс);
2) Синхронный: пассивные узлы непрерывно передают свои данные MASTER-узлу (время обновления данных в MASTER-узле за 250-300 мс).
За одну посылку один узел может передать другому до 4 технологических переменных, а каждое HART-устройство может иметь до 256 переменных, описывающих его состояние. Контроль корректности передаваемых данных основан на получении подтверждения.
HART-протокол построен по принципу главный-подчиненный. Первая группа (Универсальные Команды) содержит функции, которые выполняются во всех первичных приборах. Это следующие функции:
- считать название изготовителя и тип устройства;
- считать первичный параметр (PV) и единицы измерения;
- считать токовый выход и процент диапазона;
- считать до четырех предопределенных динамических переменных;
- считать пли записать 8-символьнын тэг. 16-символьнып описатель, дату;
- считать или записать 32-символьное сообщение;
- считать диапазон датчика. единицы измерения и константу времени демпфирования;
- считать серийный номер чувствительного элемента и ограничения;
- считать или записать номер последней сборки;
- записать адрес в моноканале.
Вторая группа (Распространенные Команды) содержит функции, которые выполняются во многих первичных приборах, но не во всех. Это следующие функции:
- считать выбор до четырех динамических переменных;
- записать константу времени демпфирования;
- записать диапазон датчика;
- калибровать (установить ноль, задать шкалу);
- задать фиксированное значение выходного тока;
- выполнить самодиагностику;
- выполнить сброс;
- настроить ноль первичной переменной (PV);
- записать единицы намерения первичной переменной (PV);
- настроить ноль и коэффициент усиления цифро-аналогового преобразователя;
- записать функцию преобразования (квадратичная линейная);
- записать серийный номер чувствительного элемента;
- считать или записать назначения динамической переменной.
Третья группа (Специфические Команды Прибора) содержит функции, уникальные для конкретного первичного прибора. Это следующие функции:
- считать или записать значение, отсекающее низкий расход;
- старт, стоп или очистка сумматора;
- считать пли записать фактор плотности для калибровки;
- выбрать первичную переменную (весовой расход или плотность);
- считать иди записать информацию о материалах прибора;
- настроить калибровку чувствительного элемента.
|
|
|
