 |


Андреев Александр Игоревич
|
|
|
|
251-2007
ИССЛЕДОВАНИЕ ГЕОМЕТРИЧЕСКИХ И КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ФРИКЦИОННЫХ МЕХАНИЗМОВ РЭС
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению лабораторных работ № 3, 4 по курсу «Прикладная механика» для студентов специальности 210201 «Проектирование и технология радиоэлектронных средств» очной и заочной форм обучения

Воронеж 2007
Составители: канд. физ.-мат. наук И.В. Андреев,
канд. техн. наук А.И. Андреев
УДК 621. 396 002 (031)
Исследование геометрических и кинематических характеристик фрикционных механизмов РЭС: методические указания к выполнению лабораторных работ № 3, 4 по курсу «Прикладная механика» для студентов специальности 210201 «Проектирование и технология радиоэлектронных средств» очной и заочной форм обучения / ГОУВПО "Воронежский государственный. технический университет"; сост. И.В. Андреев, А.И. Андреев. Воронеж, 2007. 33 с.
Настоящая работа посвящена исследованию кинематических характеристик различных фрикционных механизмов, расчету их геометрии и силовых характеристик, исследованию законов движения механизмов с жесткой и гибкой связями.
Ил. 10 Библиогр.: 5 назв.
Рецензент канд. физ. – мат. наук, доц. А.Т. Болгов
Ответственный за выпуск зав. кафедрой
д-р физ.- мат. наук, проф. Ю. С. Балашов
Печатается по решению редакционно-издательского совета Воронежского государственного технического университета.
© ГОУВПО "Воронежский
государственный технический
университет", 2007
ЛАБОРАТОРНАЯ РАБОТА № 3
ИССЛЕДОВАНИЕ КИНЕМАТИЧЕСКИХ И ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК
ФРИКЦИОННЫХ ПЕРЕДАЧ
1. ОБЩИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ РАБОТЫ
|
|
|
1.1. Цель работы.
Освоить экспериментальные методы измерений и уточнить теоретические расчеты по определению передаточных отношений фрикционных передач, определение их геометрии и диапазонов регулирования, нахождение электромеханической постоянной.
1.2. Общая характеристика работы
Основным содержанием практической работы является измерение передаточных отношений различных фрикционных механизмов, конической зубчатой передачи, лобового вариатора и зубоременных передач, проведение геометрических и динамических расчетов. В работе рассматривается методика определения крутящего момента на ведомом валу, определение силы прижатия для фрикционных передач с жесткой связью. Для измерения передаточных отношений механизмов используется лабораторная установка, включающая различные варианты соединения отдельных механизмов и электронный блок для измерения угловых частот. Включение передачи осуществляется через электродвигатель переменного тока. Для контроля числа оборотов механизмов используется секундомер. В процессе работы необходимо соблюдать правила по технике безопасности при работе с электроустановками с напряжением до 1000 В.
2. ДОМАШНИЕ ЗАДАНИЯ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ИХ ВЫПОЛНЕНИЮ
Задание № 1. Изучить основные типы фрикционных механизмов, их функции положения и передаточные характеристики, в заготовку отчета занести основные виды фрикционных передач и формулу для определения их передаточного отношения.
Методические указания по выполнению первого задания
Для выполнения задания необходимо изучить материал / 1, с. 292 - 304; 2, с. 122 - 125; 3, с. 85 - 86; 4, с. 121 - 122 /. При проработке материала следует учитывать, что аналитические методы исследования различных механизмов устанавливают функциональные зависимости между параметрами движения ведущих и ведомых звеньев. Фрикционными называют механизмы, в которых энергия от входного звена к выходному
|
|
|
передается силами трения. Применяются как передачи с постоянным передаточным отношением (рис. 1), так и фрикционные вариаторы, которые обеспечивают плавное изменение передаточного отношения. Силы трения возникают на образующей роликов (рис. 1 а, б) или на их торцевых поверхностях {рис. 1, в). Силы нормального давления F/2 создаются силами упругости составляющих дисков 1 и 2. В передачах с гибкой связью (рис. 1, г) передача вращательного движения передается ведомому звену за счет связи 3, роль которой выполняют гибкие металлические тросики, ленты, резиновые, плоские н круглые, клиновидные и зубчатые ремни Передаточное отношение с учетом упругого скольжения для фрикционного механизма имеет вид
I12 =  =
=  =
=  =
=  =
=  , (1)
, (1)
где Д1 и Д3 - диаметры ведущего и ведомого дисков, связанные с радиусами r1 и r2;
v1, и v2 - окружные скорости роликов;
ε =v1 - v2 /v1 - коэффициент упругого проскальзывания, равный в механизмах РЭС ε = 0.001 ÷ 0.02;
ξ = 1 / (1 - ε) = 1.01 ÷ 1.03 - коэффициент, учитывающий скольжение и зависящий от модуля упругости, шероховатости поверхности и условий эксплуатации.

Рис. 1. Основные схемы фрикционных передач с жесткой связью (а, б, в) и с гибкой связью (г)
При последовательном соединении n-фрикционных механизмов передаточное отношение i1n равно произведению передаточных отношений отдельных механизмов.
i1n=  …
…  = i12× i23×i34 … in-1,n (2)
= i12× i23×i34 … in-1,n (2)
Для лобового вариатора (рис. 1, б), при перемещении ролика 2, меняется передаточное отношение 112. Один из его основных параметров – диапазон регулирования.
Д =  , (3)
, (3)
где i12max и i12min – наибольшее и наименьшее передаточные отношения фрикционного механизма.
Функция положения фрикционных передач линейна, т.е. Ψ= aα + b. Быстро развивающуюся группу механизмов РЭС составляют планетарные вариаторы, которые выполняют по тем же схемам, что и зубчатые планетарные передачи. В схеме планетарного конического вариатора (рис. 2) последовательно соединены два планетарных механизма. Выходным звеном каждой ступени является центральный конический ролик 1. От входного водила 1 вращение передается сателлиту 2, образующая а - а конуса параллельна оси передачи. С сателлитом контактируют центральные ролики 1 и 3. Ролик 3 не вращается, но может смещаться вдоль оси передачи (по стрелкам Б). При этом движении расчетный радиус r’2 меняется.
|
|
|


Рис. 2. Планетарный вариатор
Планетарные вариаторы с коническими колесами могут выполняться также с тремя центральными колесами. Конструкции таких вариаторов рассмотрены в /1/.
Передаточное отношение от вала I к валу II рассчитывается по формуле
II,II = [1+ r1×r3/ (r1×r’2)]-2 = [1+ Д1×Д3/(Д1× Д’2)]-2, (4)
где rJ – расчетные радиусы; Дj – их диаметры.
Недостатком вариаторов является более низкий коэффициент полезного действия η = 0.7 ÷ 0,95.Фрикционные механизмы с жесткой связью используются в приводах многих систем компьютеров и автоматики, вариаторы различных конструктивных схем используются для интегрирования и дифференцирования функций.
Задание № 2. Изучить вопросы расчета геометрических характеристик фрикционных зубоременных передач, в заготовку отчета занести основные формулы геометрии.
Методические указания по выполнению второго задания
При выполнении данного задания необходимо изучить материал /1, с. 312-315, 4, с.125/.
Достоинством передачи с гибкой связью, в качестве которой используется зубчатый ремень, является отсутствие скольжения. Зубчатый ремень на внутренней поверхности имеет выступы или зубцы, расположенные с шагом Рр (рис. 3); зубцы входят в соответствующие впадины на шкивах.
Ремень состоит из жесткой кольцевой основы в виде тросиков 2 и резиновой массы 1. Согласно отраслевой нормали ОН-6-07-5-83, ремень характеризуется модулем m = Рр/π, общей толщиной Н, высотой зуба h, шириной В, углом 2γ=50° и толщиной S зуба. Стальные тросики диаметром d = 0.3 ÷ 0,75 мм размещают с шагом 1 ÷ 1,2 мм на расстоянии Δ от основания ремня. Основные размеры ремня в зависимости от
модуля приведены в приложении 1. Число зубьев ремня берется равным 32, 36, 40, 45, 50, 56, 64, 71, 80, 90, 100, 112, 125, 140, 160. Рекомендуемые значения модуля m: в зависимости от передаваемой мощности Р имеют вид: для P ≤ 0,4 кВт, m = 2 мм или m = 3 мм, для 0,4 ≤ Р ≤ 3,0 кВт, m = 3 мм или m = 4 мм; для Р > 3 кВт, значения m = 4 мм или m = 5 мм.
|
|
|

Рис. 3. Основные размеры зубчатого ремня (а) и шкива (б)
При расчете размеров зубчатого шкива определяют диаметр начальной окружности Д0, соответствующий положению стальных тросиков в зубчатом ремне, когда ремень находится на шкиве.
Д0 =m·z (5)
Минимальное число зубьев на шкиве zmin зависит от
модуля ремня: при m = 2 - 4 мм zmin = 16, при m = 5 мм zmin = 18.
Наружный и внутренний диаметры, а также шаг впадин шкива Pш = Рр (рис. 3, б) находят из выражений
Дн = Д0 - 2∆ (6)
Двн = Дн - 2·(h) (7)
Рш = (π·Дн )/z= Рр-2πΔ/z (8)
 (9)
(9)
где δ – угловой шаг впадин шкива.
Радиус округлений зубьев у головки и ножки шкива R = 0,25·m. Ширину основания впадины у шкива S’ш рассчитывают с учетом бокового f = 0,35·m и радиального е ≥ 3·m зазоров, при этом S’ = S - 2·е tgγ + f / cosγ.
Зубоременная передача имеет к.п.д. ŋ = 0,9 + 0,98. Передачи с гибкой связью с зацеплением выполняются также с перфорированной лентой. В таких передачах зубчатые барабаны 1 соединены гибкой 2 перфорированной лентой (рис. 4), которую изготавливают чаще всего из стали. Минимальный радиус r барабана связан с толщиной δ стальной ленты зависимостью г = 120·δ. Передача с перфорированной лентой широко применяется в принтерах персональных компьютеров. Передаточное отношение для зубоременных передач и передач с перфорированной лентой определяется выражением (1), где под Д1 и Д2 – понимают диаметры начальных окружностей.
Задание № 3. Изучить уравнение движения механизма в дифференциальной форме для вращательного звена приведения.
Методические указания по выполнению третьего задания
При выполнении этого задания следует изучить материал / 3, с. 39-40 /. Для электродвигателей постоянного тока и асинхронных переменного тока механическую
характеристику двигателя можно приближенно представить в виде прямой линии (рис. 5).
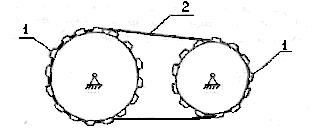
Рис. 4. Передача с перфорированной лентой
Тогда дифференциальное уравнение движения имеет вид
 , (10)
, (10)
где Тmax и Тн – максимальный и номинальный моменты двигателя, w и wн – текущая и номинальная угловые скорости.

Рис. 5. Характеристика двигателя
Уравнение (10) имеет следующее решение:
 , (11)
, (11)
где В = Jн×wн / (Тmax – Тн) – называется электромеханической постоянной привода. Из решения (11) следуют другие зависимости w = wн×(1 – е-t/B); E=(wн/В)×е-t/В. Так как теоретически время разгона равно бесконечности, обычно за время разгона принимают время, при котором w = 0,95 wн, что соответствует tраз=3 В.
3. ВОПРОСЫ К ДОМАШНЕМУ ЗАДАНИЮ
1. Какие существуют основные виды фрикционных передач?
|
|
|
2. Чему равно передаточное отношение при последовательном соединении механизмов?
3. Как определяется передаточное отношение для фрикционного механизма?
4. Объясните конструкцию ремня зубоременной передачи.
5. Как определяется модуль шкива зубоременной передачи?
6. Запишите дифференциальное уравнение движения механизма и его решение.
4. ЛАБОРАТОРНЫЕ ЗАДАНИЯ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ИХ ВЫПОЛНЕНИЮ
Задание № 1. Построить кинематическую схему механизма лабораторной установки.
Методические указания по выполнению первого задания
После ознакомления с лабораторным стендом, содержащим различные механизмы: передачи с гибкой связью с зацеплением, конической зубчатой передачей, лобового вариатора, ременной фрикционной передачей, карданной передачей, фрикционной передачей с торцевым жестким зацеплением строится кинематическая схема.
Задание № 2. Определить кинематические характеристики фрикционных передач и всего механизма в целом.
Методические указания по выполнению второго задания
Для выполнения задания необходимо воспользоваться геометрией отдельных фрикционных передач, представленных в приложении 1, а затем рассчитать по формуле (1) передаточные отношения отдельных механизмов с зубчатым ремнем и перфорированной лентой, фрикционной передачей с гибкой связью и найти передаточные отношения для лобового вариатора и фрикционной передачи с торцевым жестким зацеплением. Вычислить передаточные отношения i1n и i2n для двух последовательно - параллельных ветвей механизма. Полученные расчетные соотношения сравнить с экспериментальными значениями, считая, что число оборотов на ведущем валу n1 = 1500 об/мин. Измерения частот на выходе передач wн1 и wн2 можно провести с помощью секундомера и электронного блока контроля. Экспериментальные значения передаточных отношений определяются как i1n = w1 / wн1 и i2n = w1 / wн2, где w1 = 2×π×n1 – угловая частота на входе механизма. Сравнить расчетные и экспериментальные результаты.
Задание № 3. Определить геометрические характеристики фрикционных передач и диапазон регулирования лобового вариатора.
Методические указания по выполнению третьего задания.
Определить основные параметры зубоременной передачи: модуль m = Р/π (Р – шаг или расстояние между двумя выступами), высоту и ширину зуба, ширину и толщину ремня. Измеренные значения сравнить с данными, приведенными в табл. 1. В заготовку отчета занести основные параметры фрикционных передач. Определить экспериментально диапазон регулирования лобового вариатора.
Задание № 4. Определить электромеханическую постоянную привода и время разгона электродвигателя механизма.
Методические указания по выполнению четвертого задания.
При выполнении задания учесть, что номинальный крутящий момент Тн = Р / 2×π×n1, где Р – максимальная мощность двигателя, равная 100 Вт, n1 – число оборотов на входе механизма. Максимальный крутящий момент для данного двигателя равен Тmax ≈ 1.5×Тн и максимальный приведенный момент инерции Jн = 10-7кг×м2. Определение электромеханической постоянной находят из формулы (11), затем строят графики зависимостей изменения частоты и ускорения w = wн×(1 –еt/B) и ε (t) = (wн /В)×e-t/B, и вычисляют практическое время разгона tразг, при котором w = 0.95wн.
Задание № 5. Найти крутящие моменты на ведомых звеньях механизма.
Методические указания по выполнению пятого задания.
При выполнении этого задания следует учесть, что крутящие моменты на выходных (ведомых) звеньях механизма равны Тn1 = Tн×i1n×η1n и Тn1 = Tн×i2n×η2n.
При последовательном соединении механизмов общий коэффициент полезного действия (к.п.д.) равен произведению к.п.д. зубоременных передач η = η1× η2…ηн. Считая, что к.п.д. зубоременных передач η = 0,94, с жесткой связью η = 0,95 и фрикционных ременных с гибкой связью η = 0,96, определить η1n и η1n. При этом считать, что коэффициент полезного действия пары подшипников равен ηп = 0,99, карданной передачи η = 0,98 и зубчатой конической передачи, определяемой табл. 2.
Задание № 6. Определить силу прижатия фрикционных передач с жесткой связью.
Методические указания по выполнению шестого задания.
Работу фрикционной передачи с минимальным проскальзыванием обеспечивает сила прижатия F. Ее рассчитывают так, чтобы выполнялось неравенство Ff ≥ β×F1, которое для цилиндрической передачи можно записать в виде Ff ≥ β×T1 / 2, откуда
F ≥ β×T1 / (r1×f),
где Ff = f×F – сила сцепления;
Ft = T1 / r1 – развиваемая окружная сила;
Т1 – крутящий момент на ведущем ролике;
β – коэффициент запаса сцепления, равный β = 1.2 ÷ 3;
f – коэффициент трения скольжения.
Учитывая, что r1 = Д1 / 2, имеем
F ≥ 
При торцевом касании эта сила будет в два раза меньше, т.е.
F ≥ 
Коэффициент трения скольжения f зависит от материала, шероховатости поверхности и условий смазки. В случае материала без смазки при стальном и бронзовом роликах он равен f = 0,1÷0,18, при стальных роликах f = 0,15÷0,2; при стальном и латунном f = 0,19; при стальном и резиновом f = 0,35÷0,4; при латунных f = 0,16; при алюминиевых f = 0,22; при медном и латунном f = 0,27. Тип фрикционной передачи задается преподавателем, значения F занести в отчет.
5. КОНТРОЛЬНЫЕ ВОПРОСЫ К ЛАБОРАТОРНЫМ ЗАДАНИЯМ
1. От чего зависит коэффициент трения скольжения и чему он равен при сухом, граничном и жидкостном трении?
2. Как определяется сила прижатия фрикционных передач?
3. От чего зависит крутящий момент на ведомом валу?
4. Что такое электромеханическая постоянная и как находят практически время разгона двигателя?
5. Как определяются геометрические характеристики фрикционных передач?
6. Каким образом определяются экспериментальные отношения цилиндрических передач?
7. Что такое диапазон регулирования вариатора?
8. Изобразите схему планетарного конического вариатора?
9. Как определяется передаточное отношение конического вариатора?
10. Какие существуют передачи гибкой связи с зацеплением?
11. Как рассчитываются передаточные отношения для механизмов зубоременных передач и передач с перфорированной лентой?
6. УКАЗАНИЯ ПО ОФОРМЛЕНИЮ ОТЧЕТА
Отчет оформляется в соответствии с требованиями, изложенными в методических указаниях к лабораторной работе № 1.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Красковский Е.Я. Расчет и конструирование механизмов приборов и вычислительных систем / Е.Я. Красковский, Ю.А. Дружинин, Е.М. Филатова.- М.: Высш. шк.. 1991. -480 с.
2. Иосилевич Г.В. Прикладная механика./ Г.В. Иосилевич, Г.Б. Строганов, Г.С. Маслов.- М.: Высш. шк., 1989. -381 с.
3. Справочник конструктора РЭА: Компоненты, механизмы, надежность/ Н.А. Барканов, Б.Е. Бердичевский, П.Д. Верхопятницкий и др.; под ред. Р.Г. Варламова.- М.: Радио и связь, 1985. -384 с.
4. Рощин Г. И. Несущие конструкции и механизмы РЭА/ Г. И Рощин.- М.: Высшая школа, 1981.-375 с.
5. Курсовое проектирование механизмов РЭС /Под ред.
Г.И. Рощина.- М.: Высш. шк., 1991.- 246 с.
ЛАБОРАТОРНАЯ РАБОТА № 4.
ИССЛЕДОВАНИЕ ФРИКЦИОННЫХ МЕХАНИЗМОВ С ГИБКОЙ СВЯЗЬЮ
1. ОБЩИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ РАБОТЫ
1.1. Цель работы.
Исследовать кинематические характеристики фрикционных передач с гибкой связью. Освоить методику расчета силовых и прочностных характеристик фрикционных ременных передач.
Исследовать влияние напряжения питания на угловую скорость вращения ведомого звена фрикционных передач с гибкой связью.
1.2. Общая характеристика работы
Основным содержанием практической работы является исследование законов движения фрикционных передач с гибкой связью, изучение влияния напряжения питания на угловую скорость движения ведомого звена фрикционной передачи магнитофона в режиме перемотки и воспроизведения. Анализируются различные фрикционные передачи; их геометрия и динамические характеристики механизмов. Рассматриваются силы, действующие в зацеплении звеньев, методика их расчета и определения. При исследовании механизмов используется лабораторный стенд, содержащий кинематику переносного магнитофона и автомобильной магнитолы, а также электронный блок контроля кинематических параметров ведомых и ведущих звеньев передач. В процессе работы необходимо соблюдать правила по технике безопасности при работе с электроустановками с напряжением до 1000 В. Контроль угловых частот ведомых звеньев осуществляется автоматически с помощью магнитных датчиков, связанных с электронной схемой устройства. Для выключения питания на лабораторной установке установлен выключатель положения, а для очистки разрядов счетчика используется кнопка ‘СБРОС’.
2. ДОМАШНИЕ ЗАДАНИЯ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ИХ ВЫПОЛНЕНИЮ
Задание № 1. Изучить основные виды фрикционных механизмов с гибкой связью и определение их передаточного
отношения, в заготовку отчета занести основные виды фрикционных передач.
Методические указания по выполнению первого задания
При выполнении задания изучить материал /1, с. 306 – 312; 2, с. 126 – 129; 3, с. 86 – 87/. Анализируя задание следует учитывать, что фрикционные механизмы с гибкой связью применяются для передачи вращения между валом при больших межосевых расстояниях и для преобразования вращательного движения в прямолинейное, и наоборот. Для передачи вращения (рис. 1, а) механизмы имеют передаточное число 7÷10 и обладают плавным ходом, демпфируют и сглаживают колебания крутящего момента, имеют низкую стоимость, не нуждаются в смазке и работают в широком температурном интервале от – 40 до + 80 °С. Эти особенности обусловливают применение ременных передач в системах автоматики и ЭВМ, приводах магнитофонов и видеомагнитофонов. Кроме ременной передачи различают механизмы с непосредственными соединениями, когда гибкая связь 3 закреплена каким - либо способом на барабанах или шкивах; (рис. 1, б).
Передачи с гибкой связью с непосредственным соединением служат для преобразования движения с высокой точностью на большие расстояния. Так передача (рис. 1, б) служит для линеаризации шкалы прибора и состоит из дисков 1 и 2, связанных гибкой связью 3. В качестве связи выступает металлическая лента. Концы ленты жестко с помощью винтов закреплены на барабанах, что исключает возможность проскальзывания и обеспечивает точное перемещение ведомого звена. Для полновращательной фрикционной передачи (рис. 1, а) в качестве гибкой связи 3 между дисками 1 и 2 выступает ремень.

Рис. 1. Фрикционные передачи с гибкой связью
Ремни в поперечном сечении могут быть плоскими (рис. 2, а), клиновыми (рис. 2, б), круглыми (рис. 2, в).
Наиболее проста в конструктивном отношении передача с плоским ремнем; в ней можно применять шкивы меньших диаметров по сравнению с другими ременными передачами, т.е. плоскоременная передача наиболее компактна. Материалом для плоских ремней кроме нитриловой резины служат хлопчатобумажные ткани, различные синтетические материалы. В приборах применяют плоские ремни толщиной до 0,25 мм из полиэфирной пленки. Клиновые ремни применяют для увеличения нагрузочной способности и уменьшения проскальзывания по аналогии с жесткими клиновыми фрикционными колесами /4/. Клиноременные передачи используют для мощностей Р ≥ 30 Вт. Передачи с круглым ремнем (пассиком) используют в звуко – и видеозаписывающих приборах.

Рис. 2. Типы ремней
В канавке шкива (рис. 2, в) круглый ремень деформируется, чем достигается тот же эффект, что и при клиновом ремне. Круглоременные передачи работают при меньших натяжениях по сравнению с другими видами ремней, допускают большие неточности взаимного положения шкивов, могут работать в разных плоскостях без скручивания, дешевле клиноременных передач. Круглые ремни изготавливают из нитриловых резин или неопрена. Наилучшая форма канавки шкива – полукруг. Передаточное отношение фрикционного механизма с гибкой связью:
 , (1)
, (1)
где r1 и r2 – расчетные радиусы шкивов 1 и 2; ε = 0,005 … 0,02 – относительное упругое скольжение ремня; Д1 и Д2 – диаметры шкивов.
Для фрикционных передач с непосредственными соединениями в качестве гибких связей применяются гибкие тросики: стальные диаметром d = 0,6 - 1,02 мм;
капроновые d = 0,3 - 0,8 мм и специальные для радиоприемников d = 0,8 - 1,3 мм и гибкие стальные ленты, для которых применяются высокоуглеродистые и пружинные стали толщиной 0,1; 0,12; 0,15; 0,18; 0,2; 0,22; 0,25; 0,28; 0,3 и шириной 4 - 30 мм. Предел прочности при растяжении таких лент 735 - 1175 МПа. На рис. 3 приведены схемы передач гибкой связью с непосредственными соединениями. Для передачи преобразующей линейное перемещение гибкой связи 3 во вращательное движение ролика 1 (рис. 3, а). уравнение движения имеет вид
φ1 = 180 / π×(2×l /d + h), (2)
где φ1 – угол поворота ролика;
l – поступательное перемещение гибкой связи,
d – диаметр ролика;
h – толщина или диаметр тросика
Для передачи (рис. 3, в) уравнение движения задается формулой
φ2 = φ1×(d1 + h) / (d2 + h) (3)
Передачи с гибкой связью могут работать как на ускорение, так и на замедление с i12 до 3:1 или 1:3. Необходимым условием работы передачи с гибкой связью является силовое или кинематическое замыкание. Силовое замыкание передач с одной ветвью чаще всего осуществляется с мощью пружин связанных с ведомым звеном.
В кинематических замкнутых передачах натяжение гибкой связи производится пружиной (рис. 3, в), натяжным роликом (рис. 3, г) или винтовой стяжкой (рис. 3, д).
Шкивы и ролики для передач с гибкими тросиками выполняются с одной круговой и несколькими спиральными канавками. Профиль канавки шкива для увеличения трения обычно делают клиновидным (рис. 4, а).

Рис. 3. Схемы передач гибкой связью
Ролики для передач с гибкой лентой выполняют в прямоугольной канавке (рис. 4 б). Величина силы трения гибкой нитью на неподвижном цилиндре равна
F1 = F1 – F2 = efα – 1, (4)
где α – угол обхвата цилиндра гибкой нитью (рис. 4, в);
f – коэффициент трения между шкивом и тросиком, равный 0,25 - 0.3

Рис. 4. Профили канавок шкивов
Гибкий тросик может передавать шкиву радиусом R вращающий момент Т ≤ Ft×R = R×F2×(efα – 1). Если момент сопротивления вращения шкива будет больше Ft×R, то гибкий тросик будет скользить по шкиву и может предохранить механизм хода от перегрузки и поломки.
Задание № 2. Изучить геометрические характеристики фрикционных передач с гибкой связью, в заготовку отчета занести основные формулы расчета геометрии передачи.
Методические указания по выполнению второго задания.
При выполнении задания изучить материал /1, с. 309; 2, с.137/. Следует учитывать, что основными геометрическими параметрами передачи являются: диаметры шкивов Д1 и Д2, межосевое расстояние а, длина ремня L и угол обхвата на меньшем шкиве α. Минимальный размер Дmin для клинового и поликлинового ремней Д1min= 2×(2,5…4)×h, для круглых ремней диаметр малого шкива рекомендуется принимать Д1min= 4×d при частоте n ≤ 3000 об/мин и Д1min= 2×(2,5÷4)×d при больших n ≥ 3000 об/мин; для плоских ремней
Д1min = 50÷70×δ,
где d, h, δ – размеры ремней (рис. 2). Значение Д2 находят из формулы
Д2 = Д1×i12×(1 – ε) (5)
Экспериментально установлено, что ε = 0,015 ÷ 0,02 – для клиноременных, ε = 0,02 для круглоременных передач.
Минимальное межосевое расстояние определяют из соотношения
аmin= 0,55×(Д1 + Д2) (6)
Максимальное межосевое расстояние (во избежания увеличения габаритов и стоимости ремней) рекомендуют ограничивать значением
аmax= (1,5 - 2)ּ(Д1 + Д2) (7)
Угол обхвата меньшего шкива Д1 равен
α= 180° - 57° [ (Д2 – Д1) ] / а (8)
Требуемая длина ремня L при заданном межосевом расстоянии а и угле обхвата α определяется соотношением
L = 2×a + 0,5×π×(Д1 + Д2) + 0,25×(Д2 – Д1)2 / а (9)
Длину ремня передач с натяжным роликом также находят из геометрических соображений. Шкивы изготавливают из стали, легких сплавов и пластмасс. Наименьший размер шкива Дmin= 6 ÷ 8 мм, угол обхвата ведушего звена α1 = 100 ÷ 150°.
Задание № 3. Изучить определение коэффициента полезного действия для фрикционной передачи с гибкой связью.
Методические указания по выполнению третьего задания.
При изучении задания проработать материал /2, с 132/ и учесть, что при работе плоскоременной передачи часть энергии расходуется на упругий гистерезис, сдвиг, изгиб, на скольжение ремня по шкивам, аэродинамическое сопротивление движению ремня и шкивов, сопротивление трению подшипниках валов передачи. В клиноременной и круглой передачах добавляются потери на трение при радиальном перемещении ремня в процессе входа в канавку шкива и выхода из нее, а также потери на упругий гистерезис при изгибе ремня.
Коэффициент полезного действия (к.п.д) ременной передачи зависит от коэффициента тяги φ и соответствующего ему относительного скольжения ремня ε. Наибольший η соответствует некоторому значению Ψ0 на линейном участке кривой скольжения (рис. 5).

Рис 5. Кривая скольжения ξ от коэффициента тяги Ψ
Шкивы и ролики для передач с гибкими тросиками выполняются с одной круговой и несколькими спиральными канавками. Профиль канавки шкива для увеличения трения обычно делают клиновидным (рис. 4, а). При увеличении Ψ0 происходит снижение к.п.д. из-за нарастания потерь энергии на трение. Эффективным считают нагруженные передачи, соответствующие наибольшему к.п.д и некоторому запасу по сцеплению (Ψ0 = 0,4 ÷ 0,5) – для плоскоременных передач, (Ψ0 = 0,5 ÷ 0,6) – для круглоременных передач, (Ψ0 = 0,6 ÷ 0,7) – для клиноременных передач. При этом η равен η = 0,97 ÷ 0,98 для плоскоременной передачи, η = 0,95 ÷ 0,97 для круглоременной передачи и η = 0,92 ÷ 0,97 для клиноременной передачи
Задание № 4. Изучить определение силового усилия в фрикционных передачах с гибкой связью, в заготовку отчета занести основные расчетные соотношения.
Методические указания по выполнению четвертого задания
При выполнении задания следует проработать материал / 1, с. 309-311; 5, с. 123-124 / и учесть, что начальная сила натяжения гибкой связи равна
F 0 = σ 0×S, (10)
где σ0 – напряжение предварительного натяжения, зависящее от типа гибкой связи;
S - площадь сечения гибкой связи.
Для передач с ремнем из синтетических волокон и полиамидным покрытием при толщине ремня δ ≤ 1 мм. Напряжение σ0 =12 ÷ 15 МПа, для передач, используемых в механизмах настройки, ввиду меньшей упругости применяемых материалов и малой величины окружного усилия σ0 = 0,5 ÷ 1 МПа. Передача окружного усилия F1 = F1 – F2 вызывает перераспределения F0 при n1 = 0 (рис. 4, в) до значения F1 > F0 в ведущей ветви и F2 < F0 в ведомой ветви при n1 > 0. Для создания сил трения необходимо, чтобы F2 > 0. Из системы уравнений
F1 = 2×T1 / Д1 = F1 – F2 (11)
2×F0 = F1+F2 (12)
следует
F1 = F0×T1 / Д и F2 = F0×T1 / Д1 (13)
Предельное соотношение между силами f1 и f2 определяется формулой Эйлера
F1 = F2×efα, (14)
Где f - коэффициент трения скольжения, a - угол обхвата
Из (13) и (14) начальная сила натяжения равна
 (15)
(15)
При этом угол обхвата гибкой связью меньшего шкива определяется выражением (8). Гибкая связь может передавать шкиву вращательный момент Т ≤ F1×Д1 / 2 = Д1 / 2× F2 (efα – 1). Для увеличения F1 в механизмах настройки угол обхвата α увеличивают до 360° и более. Предварительное натяжение гибкой связи осуществляется как показано выше (рис. 3) с помощью натяжного устройства, а также путем предварительного растяжения при ее установке на шкивы и прикрепления ее конца к шкиву через пружину (рис. 3, в). Расчет таких передач на прочность рассмотрен в задании 1. Передачи с гибкой связью при ее непосредственном соединении со шкивами применяют, когда требуется осуществить настройку. При небольших крутящих моментах Т1 расчет передачи ведут по формулам (10...15), задаваясь сечением ремня, коэффициентом трения скольжения и геометрией прецизионного перемещения исполнительного звена, так как здесь исключена возможность проскальзывания гибкой связи по шкивам за счет ее жесткого закрепления на них.
3. ВОПРОСЫ К ДОМАШНЕМУ ЗАДАНИЮ
1. Как определяется через усилия вращательный
момент ведущего звена?
2. Чему равна начальная сила натяжения гибкой связи?
3. Объясните расчет геометрии фрикционной передачи с гибкой связью.
4. Запишите уравнение для фрикционной передачи с
гибкой связью, которую замыкает пружина
5. Какие существуют конструкции ремней и шкивов для ременных передач?
6. Чему равно передаточное отношение фрикционной передачи с гибкой связью?
7. Какие существуют типы фрикционных передач с гибкой связью?
8. Что используется в качестве гибких связей в фрикционных
передачах с непосредственным соединением?
9. Как определяется сила трения между шкивом и тросиком?
10. Чему равен к.п.д. различных фрикционных передач?
4. ЛАБОРАТОРНЫЕ ЗАДАНИЯ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ИХ ВЫПОЛНЕНИЮ
Задание № 1. Построить кинематическую схему механизма лабораторной установки.
Методическое указание по выполнению первого задания.
После ознакомления с лабораторной установкой, содержащей электропривод магнитофона и магнитолы, блок контроля, построить кинематическую схему механизма.
Задание № 2. Определить геометрию фрикционной передачи и измерить число оборотов на ведомом валу.
Методические указания по выполнению второго задания
При выполнении лабораторного задания выключатель 1
поставить в положение "вкл". Поставить переключатель в положение "V" и измерить с помощью электронного блока число оборотов на ведомом валу магнитолы.
Поставить переключатель в положение ''9V" и измерить число оборотов на ведомом валу. Изменить диаметры ведущего и ведомого дисков, межосевое расстояние. Рассчитать передаточное отношение i12 по формуле (1) и сравнить с экспериментальным. Определить крутящий момент на ведомом валу Т2 = Т1×i12×ŋ, считая что коэффициент полезного действия для м
|
|
|
