 |


Анализ механических характеристик двигателя со смешанным возбуждением.
|
|
|
|
Введение.
Темой курсовой работы является «Анализ механических характеристик двигателя со смешанным возбуждением».
Актуальность: На современных судах двигатели со смешанным возбуждением широко применяют в регулируемом электроприводе постоянного тока – в грузоподъёмных, якорно-швартовых и других механизмах, требующих изменения скорости.
Цель исследования: изучение механических характеристик двигателя со смешанным возбуждением и электродвигателя данного механизма.
Задачи:
1) Изучить теоретические основы судовых электроприводов.
2) Научиться рассчитывать механические и электрические характеристики электропривода устройства.
Объектом исследования является асинхронный электродвигатель с короткозамкнутым ротором типа АМ-62-4.
Предмет исследования: Электрические и механические характеристики двигателей и теоретическое обоснование эксплуатации этого типа электродвигателей в судовых условиях.
Методы исследования:
Теоретические методы:
- анализ (проанализирована различная литература и интернет источники по электроприводам, двигателям со смешанным возбуждением, методике расчёта задач по разделу «электропривод»;
- обобщение (выделение нужной информации о конструкции двигателя со смешенным возбуждением и его механических характеристиках);
- синтез (объединение материалов из литературных и интернет источников);
- сравнение.
Практические методы:
- расчетная часть (проведение математических расчётов по заданным
параметрам);
- графическое построение механических и скоростных характеристик асинхронного короткозамкнутого двигателя.
Теоретическая значимость заключается в обобщении и пополнении знаний по теме исследования.
|
|
|
Практическая значимость – научиться рассчитывать и находить естественные механические и скоростные характеристики электропривода, подготовка графических элементов по расчётной части.
Структура работы выполнена следующим образом:
Глава 1 содержит анализ механических характеристик двигателя со смешенным возбуждением.
Глава 2 содержит элементы расчёта и проектирования.
Глава 3 посвящена графическому отображению зависимостей электродвигателя.
Анализ механических характеристик двигателя со смешанным возбуждением.
На судах для изменения скорости вращения грузовых, якорных, швартовых и других лебёдок используют двигатели со смешанным возбуждением.
Двигатель смешанного возбуждения, как известно из теории электрических машин, имеет две обмотки возбуждения: независимую и последовательную. Для расчета электромагнитных характеристик здесь используют обычно, так же как и у двигателей последовательного возбуждения, естественные универсальные характеристики момента и скорости от тока якоря.
Схема двигателя со смешанным возбуждением дана на рис. 1. Наличие на полюсах двигателя двух обмоток позволяет использовать преимущества двигателей параллельного и последовательного возбуждения. Этими преимуществами являются постоянство скорости и большой вращающий момент при пуске двигателя.
Благодаря присутствию параллельной обмотки двигатель со смешанным возбуждением не может пойти в «разнос» при малой нагрузке или отсутствии ее. Обмотки возбуждения могут быть включены так, чтобы их магнитные потоки совпадали по направлению (согласное включение), или так, чтобы потоки были противоположны (встречное включение). При согласном включении обмоток двигатель будет приближаться по свойствам к двигателю с параллельным или последовательным возбуждением, в зависимости от того какая из обмоток будет иметь большую намагничивающую силу. При нагрузке двигателя со встречным включением обмоток магнитный поток последовательной обмотки, увеличиваясь, уменьшает общий магнитный поток двигателя, а скорость двигателя увеличивается.
|
|
|
Эти двигатели имеют конечное значение скорости холостого хода, которая определяется МДС независимой обмотки. Регулирование осуществляется, главным образом, путем изменения напряжения якоря. Электромеханические и регулировочные характеристики так же, как и энергетические показатели, занимают промежуточное положение между характеристиками двигателей
независимого и последовательного возбуждения.

Рис. 1 Электродвигатель со смешанным возбуждением.
а)схема устройства б) электрическая схема соединения и включения в сеть 1-пусковой реостат 2-регулирющий реостат
Регулировка скорости двигателя со смешанным возбуждением выполняется
регулировочным реостатом, включенным в цепь параллельной обмотки возбуждения.
 |
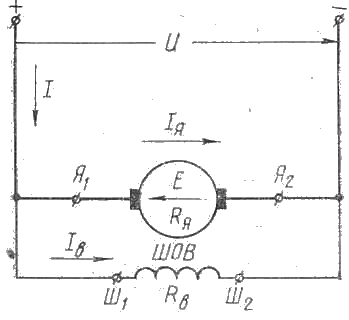
Рис. 2 — Схема электродвигателя смешанного возбуждения
Принципиальная схема электродвигателя смешанного возбуждения приведена на рис. 2. В этом двигателе имеются две обмотки возбуждения – параллельная (шунтовая, ШО), подключенная параллельно цепи якоря, и последовательная (сериесная,СО), подключенная последовательно цепи якоря. Эти обмотки по магнитному потоку могут быть включены согласно или встречно.
При согласном включении обмоток возбуждения их МДС складываются и результирующий поток Ф примерно равен сумме потоков, создаваемых обеими обмотками. При встречном включении результирующий поток равен разности потоков параллельной и последовательной обмоток. В соответствии с этим, свойства и характеристики электродвигателя смешанного возбуждения зависят от способа включения обмоток и от соотношения их МДС.
Скоростная характеристика n=f (Ia) при U=Uн и Iв=const (здесь Iв — ток в параллельной обмотке).
С увеличением нагрузки результирующий магнитный поток при согласном включении обмоток возрастает, но в меньшей степени, чем у двигателя последовательного возбуждения, поэтому скоростная характеристика в этом случае оказывается более мягкой, чем у двигателя параллельного возбуждения, но более жесткой, чем у двигателя последовательного возбуждения.
|
|
|
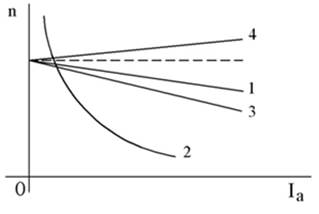 |
Соотношение между МДС обмоток может меняться в широких пределах. Двигатели со слабой последовательной обмоткой имеют слабо падающую скоростную характеристику (кривая 1, рис. 3).
Рис. 3 — Скоростные характеристики двигателя смешанного возбуждения
Чем больше доля последовательной обмотки в создании МДС, тем ближе скоростная характеристика приближается к характеристике двигателя последовательного возбуждения. На рисунке 3 линия 3 изображает одну из промежуточных характеристик двигателя смешанного возбуждения и для сравнения дана характеристика двигателя последовательного возбуждения (кривая 2).
При встречном включении последовательной обмотки с увеличением нагрузки результирующий магнитный поток уменьшается, что приводит к увеличению скорости двигателя (кривая 4). При такой скоростной характеристике работа двигателя может оказаться неустойчивой, т.к. поток последовательной обмотки может значительно уменьшить результирующий магнитный поток. Поэтому двигатели со встречным включением обмоток не применяются.
Механическая характеристика n=f (М) при U=Uн и Iв=const. двигателя
смешанного возбуждения показана на рис.4 (линия 2).
 |
Рис. 4 — Механические характеристики двигателя смешанного возбуждения
Она располагается между механическими характеристиками двигателей параллельного (кривая 1) и последовательного (кривая 3) возбуждения. Подбирая соответствующим образом МДС обеих обмоток, можно получить электродвигатель с характеристикой, близкой к характеристике двигателя параллельного или последовательного возбуждения.
Двигатели смешенного возбуждения имеют шунтовую и сериесную обмотки возбуждения, поэтому магнитный поток, созданный двумя обмотками возбуждения:
 ,
,
где Wш, Wc – количество витков сериесной и шунтовой обмоток возбуждения.
Серпесная и шунтовая обмотки, как правило, действуют согласно, поэтому потоки их суммируются.
|
|
|
При идеальном холостом ходе сериесная обмотка не создает потока, поэтому
 .
.
Для большинства двигателей значение холостого хода  . С возникновением нагрузки на валу двигателя ток начинает течь по сериесной обмотке и поток полюсов быстро нарастает, что вызывает столь же быстрое уменьшение частоты вращения электродвигателя.
. С возникновением нагрузки на валу двигателя ток начинает течь по сериесной обмотке и поток полюсов быстро нарастает, что вызывает столь же быстрое уменьшение частоты вращения электродвигателя.
По мере насыщения магнитной системы величина магнитного потока изменяется всё меньше с изменением нагрузки и механическая характеристика, круто спадающая к оси моментов при небольших нагрузках, становится всё более пологой. Так как двигатели со смешенным возбуждением работают при значительном насыщении магнитной системы, точное аналитическое выражение их механической характеристики невозможно. Поэтому естественные скоростные и механические характеристики этих двигателей, так же как и двигателей последовательного возбуждения, рассчитывают графическим методом по универсальным характеристикам которые дают заводы изготовители.
Расчёт пусковых характеристик двигателя смешенного возбуждения аналогичен расчёту двигателей параллельного возбуждения. Для этого вначале строится естественная характеристика двигателя смешенного возбуждения по имеющейся в каталоге универсальной характеристике, а затем, задаваясь минимальным и максимальным пусковым током, строят лучевую диаграмму. По ней определяют величины пусковых сопротивлений каждой ступени.
Тормозные режимы и расчет тормозных характеристик так же аналогичен расчёту двигателей параллельного возбуждения.
Так как пусковые и тормозные характеристики двигателя смешенного возбуждения аналогичны двигателю параллельного возбуждения, то рассмотрим данные характеристики на примере двигателя с параллельным возбуждением.
Обмотка возбуждения электродвигателя постоянного тока с параллельным возбуждением (шунтов о и электродвигатель) подключается к обмотке якоря параллельно (рис. 5), что и обусловливает его электромеханические свойства.
Если пренебречь влиянием реакции якоря, то при постоянном напряжении
 |
U можно считать, что и магнитный поток электродвигателя Ф является постоянной величиной. При работе электродвигателя его якорь вращается в этом магнитном потоке со скоростью n и в обмотке якоря наводится з. д. с.
Рис. 5 Схема электродвигателя с параллельным возбуждением
Ток в обмотке возбуждения ШОВ определяется по закону Ома:

где R в — сопротивление цепи возбуждения.
Таким образом, ток в обмотке якоря должен определяться по выражению:

Данное выражение показывает,, что в процессе пуска в ход электродвигателя величина тока в обмотке якоря изменяется. В начале пуска, когда п = 0, противо
|
|
|
э.д.с. обмотки якоря E = сnФ = 0. Следовательно, пусковой ток электродвигателя:

т. е. он ограничивается лишь весьма небольшим сопротивлением якоря и может превышать номинальный ток электродвигателя в десятки раз. В дальнейшем, по мере разгона электродвигателя, его противо э.д.с. возрастает, а ток в обмотке якоря снижается.
Значительный толчок тока в начале пуска, с точки зрения нагрева, не опасен для электродвигателя, так как пуск протекает довольно быстро и перегреться обмотка якоря не успевает. Однако наличие вращающегося токосъемного устройства— коллектора заставляет принимать особые меры для ограничения величины пускового тока. Большие толчки пускового тока могут вызывать серьезные нарушения нормальной коммутации (например, недопустимое искрение на коллекторе). Кроме того, большие толчки тока в сети неблагоприятно отражаются на работе других электродвигателей, в особенности, осветительных приборов, включенных в ту же сеть. Имеются также и механические причины, заставляющие ограничивать пусковые токи электродвигателей. Это связано с тем, что повышенные пусковые токи приводят к пропорциональному повышению пусковых моментов, которые могут вызвать в механизме большие инерционные усилия, опасные для деталей передач.
Для ограничения пусковых токов обычно в цепь якоря включают последовательно пусковой реостат. Путем подбора соответствующего сопротивления пускового реостата можно снизить пусковой ток, а следовательно, и пусковой момент до любой требуемой величины, так как при наличии дополнительного сопротивления R в цепи якоря пусковой ток электродвигателя:

Пусковой реостат имеет несколько ступеней, что обеспечивает более
плавный пуск электродвигателя. В начале пуска в цепь якоря включается весь пусковой реостат, а в дальнейшем, по мере разгона электродвигателя, отдельные ступени реостата отключаются (шунтируются) вручную или автоматически. Пуск электродвигателя заканчивается, когда весь пусковой реостат отключен (замкнуты контакты 1У, 2У, 3У на рис. 6).
Расчет пускового реостата может быть произведен графоаналитическим способом. Для этого необходимо иметь номинальные данные электродвигателя
и выбирать пределы изменения тока или момента при пуске. Обычно принимают:

где Мс— момент сопротивления,при пуске.

| Рис. 6. Схема включения двигателя с параллельным возбуждением при пуске | Рис. 7. Механические характеристики двигателя с параллельным возбуждением при пуске |
Имея номинальные данные электродвигателя, нетрудно построить его естественную механическую или скоростную характеристики по двум точкам с координатами (0, п0) и (Mн, nн).
Далее расчет пускового реостата производится в следующем порядке:
1. На пусковой диаграмме (рис. 7) вычерчивают в определенном масштабе естественную характеристику электродвигателя а и на оси абсцисс откладывают Мmin и Мmах.
2. Если число ступеней пускового реостата не задано, то приступают к
построению пусковых характеристик. При этом имеют в виду, что в первоначальный момент пуска, когда в цепь якоря включен весь пусковой реостат, пусковой момент электродвигателя равен Мmах, т. е. пуск электродвигателя начинается с точки 1. Следовательно, первая пусковая характеристика проходит через точки 1 и п0 (характеристика d). Таким образом, электродвигатель начинает разгоняться по характеристике d. В точке 2, когда развиваемый электродвигателем вращающий момент станет равным Mmin должна отключаться первая ступень пускового реостата. При этом ток якоря, а значит, и вращающий момент электродвигателя увеличивается до величины Мmах и электродвигатель переходит на работу по второй пусковой характеристике с, проходящей через точки 3 и п0. Дальнейший разгон электродвигателя происходит по этой характеристике до точки 4. Здесь должна быть выключена вторая ступень реостата, и электродвигатель перейдет на работу по характеристике b.
Дальнейшее построение пусковой диаграммы производится до тех пор, пока с последним переключением реостата электродвигатель не перейдет на работу по естественной характеристике а. Разгон электродвигателя прекратится в точке 8, когда развиваемый двигателем момент станет равным моменту сопротивления Мс.
Если число ступеней пускового реостата заранее задано или выбрано, исходя из требуемой плавности пуска, то построение пусковой диаграммы производится таким же способом. При этом может оказаться, что при выключении последней ступени реостата электродвигатель переходит на работу по естественной характеристике в точке, не лежащей на вертикали Мmax. В таком случае следует несколько изменить значения Mmax и Mmin и построить новую пусковую диаграмму, в которой бы полностью соблюдались выбранные пределы изменения вращающего момента при пуске.
Когда пусковая диаграмма построена, нетрудно рассчитать общее сопротивление пускового реостата и отдельных его ступеней, так как отрезок 1—7 пропорционален общему сопротивлению реостата, а отрезки 1—3, 3—5 и 5—7 пропорциональны соответственно сопротивлениям первой, второй и третьей ступеней. Это можно доказать следующим образом. Очевидно, что естественной характеристике а соответствует сопротивление Rя, а характеристике b —сопротивление Rя + R3, где R3 —сопротивление третьей ступени реостата. При некоторой заданной силе тока, например Imах, числа оборотов электродвигателя на этих характеристиках будут п7=(1—7) и n5= (1—5).
В ряде случаев дополнительно к рассмотренным выше пусковым сопротивлениям в первый момент пуска включают еще так называемую предварительную ступень, которая снижает пусковой момент электродвигателя до величины, меньшей момента сопротивления (характеристика е на рис. 7). Предварительная ступень служит для устранения люфтов, слабины канатов и цепей, наличие которых может приводить к большим динамическим ударам при пуске.
Следует иметь в виду, что пусковые реостаты рассчитаны на кратковременный режим работы, поэтому находиться под током длительное время они не могут. Если же имеется необходимость в регулировании скорости изменением сопротивления в цепи якоря, необходимо использовать либо специальный реостат, либо пусковой реостат, рассчитанный соответствующим образом на нагрев.
Пуск электродвигателя с помощью реостата является весьма неэкономичным, поскольку при этом в реостате и в якоре имеют место большие потери энергии, пропорциональные квадрату пускового тока. Однако данный способ пуска является наиболее простым и удобным и применяется очень часто.
Тормозной режим работы двигателя в электроприводе применяется наравне с двигательным. Использование электродвигателя в качестве электрического тормоза широко применяется на практике для сокращения времени остановки и реверса, уменьшения скорости вращения, предотвращения чрезмерного увеличения скорости движения и в ряде других случаев.
Работа электродвигателя в качестве электрического тормоза основана на принципе обратимости электрических машин, то есть электродвигатель при
определенных условиях переходит в генераторный режим.
Практически для торможения применяются три режима:
1) генераторный (рекуперативный) с отдачей энергии в сеть,
2) электродинамический,
3) противовключение.

Рис. 8. Схемы включения и механические характеристики двигателя с параллельным возбуждением в двигательном и тормозных режимах.
При построении механических характеристик в системе прямоугольных координат важное значение имеет определение знаков момента и скорости вращения двигателя в двигательном и тормозных режимах. Для этого двигательный режим принимают условно за основной, считая скорость вращения и момент двигателя в этом режиме положительными. В связи с этим характеристики n = f (М) двигательного режима располагаются в первом квадранте (рис. 8). Расположение механических характеристик в тормозных режимах зависит от знаков момента и скорости вращения.
Рассмотрим схемы включения и механические характеристики двигателя с параллельным возбуждением в двигательном и тормозных режимах.
Противовключение.
Состояние электропривода определяется совместным действием момента двигателя Мд и статического момента нагрузки Мс. Например, установившаяся скорость вращения n1 при подъеме груза лебедкой соответствует работе двигателя на естественной характеристике (рис.8 точка А), когда Мд = Мс. Если в цепь якоря двигателя ввести добавочное сопротивление, то скорость вращения снизится вследствие перехода на реостатную характеристику (точка В, соответствующая скорости n2 и Мд = Мс).
Дальнейшее постепенное увеличение добавочного сопротивления в цепи якоря двигателя (например, до величины, отвечающей участку n0С характеристики) приведет вначале к прекращению подъема груза, а затем к изменению направления вращения, то есть груз будет опускаться (точка С). Такой режим называют противовключением.
В режиме противовключения момент Мд имеет положительный знак. Знак скорости вращения изменился и стал отрицательным. Следовательно, механические характеристики режима противовключения располагаются в четвертом квадранте, а сам режим является генераторным. Это вытекает из принятого условия определения знаков момента и скорости вращения.
Действительно, механическая мощность, пропорциональная произведению n и М, в двигательном режиме имеет положительный знак и направлена от двигателя к рабочей машине. В режиме противовключения вследствие отрицательного знака n и положительного знака М их произведение будет отрицательным, следовательно, механическая мощность передается в обратном направлении — от рабочей машины к двигателю (генераторный режим). На рис. 8 знаки n и М в двигательном и тормозных режимах показаны в кружках, стрелками.
Участки механической характеристики, соответствующие режиму противовключения, являются естественным продолжением характеристик
двигательного режима из первого в четвертый квадрант.
Из рассмотренного примера перехода двигателя в режим противовключения видно, что э. д. с. двигателя, зависящая от скорости вращения, одновременно с последней при переходе через нулевое значение изменяет знак и действует согласно с напряжением сети: U = (-Е)+IяRя, откуда Iя = (U+Е)/R
Для ограничения тока в цепь якоря двигателя включают значительное по величине сопротивление, обычно равное двукратному пусковому. Особенность режима противовключения состоит в том, что к двигателю подводится механическая мощность со стороны вала и электрическая мощность из сети, и вся она расходуется на нагревание цепи якоря: Рм+Рэ = ЕI + UI = I2(Rи + Iдоб)
Режим противовключения может быть получен и путем переключения обмоток на обратное направление вращения, в то время, как якорь продолжает вращаться в прежнем направлении за счет запаса кинетической энергии (например, при остановке машины с реактивным статическим моментом — вентилятора).
В соответствии с принятым условием учета знаков n и М по двигательному режиму, при переключении двигателя на обратное вращение следует изменить положительные направления координатных осей, то есть двигательный режим теперь окажется в третьем квадранте, а противовключение — во втором.
Таким образом, если двигатель работал в двигательном режиме в точке А, то в момент переключения, когда скорость еще не успела измениться, он окажется на новой характеристике, во втором квадранте в точке D. Торможение будет происходить вниз по характеристике DE (-n0), и если двигатель не отключить при скорости т = 0, он будет работать на этой характеристике в точке Е, вращая машину (вентилятор) в обратном направлении со скоростью -n4.
Рассмотрим электродинамический режим торможения.
Электродинамическое торможение получают путем отключения якоря двигателя от сети и включения его на отдельное внешнее сопротивление (рис. 8, второй квадрант). Очевидно, что этот режим мало отличается от работы генератора постоянного тока с независимым возбуждением. Работа на естественной характеристике (прямая N0) соответствует режиму короткого замыкания, из-за больших токов торможение в этом случае возможно только при малых скоростях.
В режиме электродинамического торможения якорь отключен от U сети, следовательно: U = 0; ω0 = U/c = 0
Уравнение механической характеристики имеет вид: ω = (-RM)/c2 или ω = (-Rя + Rдоб/9,55се2)М
Механические характеристики электродинамического торможения проходят через начало координат, а это значит, что с уменьшением скорости тормозной момент двигателя уменьшается.
Наклон характеристик определяется так же, как и в двигательном режиме, величиной сопротивления в цепи якоря. Электродинамическое торможение экономичнее противовключения, так как энергия, потребляемая двигателем из сети, расходуется только на возбуждение.
Величина тока якоря, а следовательно, и тормозного момента зависит от скорости вращения и сопротивления цепи якоря: I = -Е/R = -сω/R
Рассмотрим генераторный режим торможения с отдачей энергии в сеть.
Такой режим возможен только в случае, когда направление действия статического момента совпадает с моментом двигателя. Под действием двух моментов — момента двигателя и момента рабочей машины — скорость вращения привода и э. д. с. двигателя начнут возрастать, в результате будет уменьшаться ток и момент двигателя: I = (U - Е)/R= (U - сω)/R
Дальнейшее увеличение скорости вначале приводит к режиму идеального холостого хода, когда U = Е, I = 0 и n = n0, а затем, когда э. д. с. двигателя станет больше приложенного напряжения, двигатель перейдет в генераторный режим, то есть начнет отдавать энергию в сеть.
Механические характеристики в этом режиме являются естественным продолжением характеристик двигательного режима и располагаются во втором квадранте. Направление скорости вращения не изменилось, и она осталась по-прежнему положительной, а момент имеет отрицательный знак. В уравнении механической характеристики генераторного режима с отдачей энергии в сеть изменится знак момента, следовательно, оно будет иметь вид: ω = ωо + (R/c2)M или ω = ωо + (R/9,55cе3)M
Практически генераторный режим торможения применяют только при больших скоростях в приводах с потенциальными статическими моментами, например при опускании груза с большой скоростью.
Расчётная часть.
Рассчитать естественные механическую и скоростную характеристики асинхронного короткозамкнутого двигателя типа АМ-62-4 по следующим паспортным (каталожным) данным: Рн =9 квт;  =1445 об/мин; при U=220 В;
=1445 об/мин; при U=220 В;  =42,0 А;
=42,0 А;  2,05;
2,05;  1,6;
1,6;  0,74; f=50 Гц; p=2.
0,74; f=50 Гц; p=2.
Решение.
1. Номинальный момент на валу двигателя из уравнения:


2. Максимальный момент:
 ,44
,44 
3. Синхронная скорость двигателя типа АМ-62-4 (четырёхполюсного):

4. Номинальное скольжение:

5. Критическое скольжение из уравнения:

 0,14
0,14 
6. Коэффициент, а, согласно определению, будет:

7. Расчетный коэффициент k по формуле (1):


Задаваясь значениями скольжения s от 0 до 1, определяем соответствующие им значения моментов:
из уравнения (2)

При S=0:

При S=0,01

При S=0,03

При S=0,057

При S=0,1

При S=0,2

При S=0,237

При S=0,3

При S=0,5

При S=0,7

При S=0,9

При S=1

из уравнения (3):

При S=0

При S=0,01

При S=0,03

При S=0,057

При S=0,1

При S=0,2

При S=0,237

При S=0,3

При S=0,5

При S=0,7

При S=0,9

При S=1

8. Выражая механическую характеристику, как n=f(M), для принятых значениях s определяем скорости двигателя:

При S=0

При S=0,01

При S=0,03

При S=0,057

При S=0,1

При S=0,2

При S=0,237

При S=0,3

При S=0,5

При S=0,7

При S=0,9

При S=1

9. Ток холостого хода двигателя находим по уравнению (4)


10. Для принятых значений s определяем из уравнения (5) потребляемый двигателем ток:

При S=0

При S=0,01

При S=0,03

При S=0,057

При S=0,1

При S=0,2

При S=0,237

При S=0,3

При S=0,5

При S=0,7

При S=0,9

При S=1

Про S=0

При S=0,01

При S=0,03

При S=0,057

При S=0,1

При S=0,2

При S=0,237

При S=0,3

При S=0,5

При S=0,7

При S=0,9

При S=1

11. Результаты расчетов сводим в таблице №1.
Таблица №1.
| S | M1 | M2 | I0 | Imin | Imax |
| 19,99 | 19,99 | 19,99 | |||
| 0,01 | 1,768 | 1,704 | 19,99 | 22,45 | 22,54 |
| 0,03 | 5,098 | 4,919 | 19,99 | 36,1 | 36,55 |
| 0,057 | 8,669 | 8,403 | 19,99 | 57,73 | 58,53 |
| 0,1 | 11,791 | 11,579 | 19,99 | 86,55 | 87,3 |
| 0,2 | 11,736 | 12,127 | 19,99 | 123,51 | 121,49 |
| 0,237 | 10,912 | 11,66 | 19,99 | 131,56 | 127,37 |
| 0,3 | 9,35 | 10,79 | 19,99 | 142,14 | 133,76 |
| 0,5 | 6,46 | 9,25 | 19,99 | 169,4 | 141,99 |
| 0,7 | 4,78 | 19,99 | 197,35 | 144,47 | |
| 0,9 | 3,78 | 9,38 | 19,99 | 228,15 | 145,65 |
| 3,42 | 9,7 | 19,99 | 244,43 |
Графическая часть.

Рис. 9. «Зависимость момента М1 и М2 от скольжения S»

Рис. 10. «Зависимость тока I0, Imin и Imax от скольжения S»
Заключение.
В курсовой работе нами были теоретически проанализированы механические характеристики двигателя со смешенным возбуждением, а так же принцип работы данного устройства. При работе с учебной и научной литературой систематизированы, полученные в процессе обучения, знания по дисциплине «Судовые электроприводы».
В практической части был произведен анализ электрических и механических характеристик асинхронного электродвигателя с короткозамкнутым ротором типа АМ-62-4. В результате проведенной работы были закреплены знания и навыки, полученные в процессе обучения по дисциплине «Судовые электроприводы». Умение проводить расчёты и анализ полученных результатов является неотъемлемой частью профессиональной подготовки судового электромеханика. Эти знания и умения пригодятся нам в дальнейшей профессиональной деятельности на современных судах.
Список литературы:
1. Автоматическое управление электротермическими установками / Под ред. А.Д. Сванчанского. – М.: Энергоатомиздат, 1990.
2. Актуальность проблемы энергосбережения в системе водоснабжения // Ежемесячная газета «Новости приводной техники». – М., 2001.
3. Бабокин Г.И. Энергосбережение в электроприводе конвейера // Изв. вузов. Горный журнал. – 2002.
4. Брасдавский И.Я., Зубрицкий О.Б., Ольков А.Е. Энергетика регулировочных режимов асинхронного электропривода при потенциальном моменте нагрузки // Изв. вузов. Электромеханика. – 1975.
5. Использование частотно-регулируемого электропривода в насосных станциях // Ежемесячная газета «Новости приводной техники». – М.: 2002.
6. Частотно-регулируемый асинхронный электропривод как средство энергосбережения / И.А. Авербах, Е.И. Барац, И.Я. Браславский, З.Ш. Ишматов // Энергетика региона. – Екатеринбург, 2002.
7. Чекунов К.А. Судовые электроприводы и электродвижение судов. Л., ”Судостроение”, 1969.
8. Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. – Екатеринбург: УРО РАН, 2000.
9. Электропривод и автоматизация промышленных установок как средства энергосбережения / И.А. Авербах, Е.И. Ба
|
|
|
