 |


Интерфейсы рекомендаций МСЭ-Т: серии X
|
|
|
|
Для построения современных сетей ПД общего пользования применяют рекомендации МСЭ-Т Х. 25, X.2I, X. 21-бис. Рекомендация Х.25 состоит из трех частей, связанных с тремя уровнями (физическим, канальным и сетевым) сопряжения ООД.
Первая часть включает две рекомендации X.2I и Х.21-бис. В X.2I сигналы управления кодируются знаками стандартного семиэлементного первичного кода КОИ-7 после двух символов SYN и используются цепи нового стыка Х.24. Сети с интерфейсом X.2I предоставляют пользователям все услуги изохронных цифровых сетей с коммутацией цепей данных. В Х.21-бис для каждого управляющего сигнала имеется отдельная цепь, и используются цепи стыкаV.24.
X.2I и Х.21-бис представляют собой совокупность стыка первого уровня и протоколов второго и третьего уровней. Процедуры и цепи стыка первого уровня используются для передачи сигналов управления и данных. Процедуры и форматы протокола второго уровня обеспечивают защиту от ошибок сигналов управления установлением и разъединением коммутируемого соединения и сигналов обмена готовностями устройств ООД. Процедуры и форматы протокола третьего уровня регламентируют действие пользователя сети в процессе коммутации.
Рекомендации X.21 МСЭ-Т описывают цепи обмена, схему сигналов для синхронной работы в коммутируемой сети цифровых каналов, метод синхронизации символов между ООД и каналом. В рекомендации Х.21-бис процедуры стыкаV.24 расширены с целью обеспечения возможности подключения АПД с помощью аналоговых каналов к цифровым сетям коммутации. Процедуры передачи и приема адресной информации позволяют АПД устанавливать соединение через коммутируемые каналы с другими АПД, имеющими доступ к цифровой сети.
|
|
|
Для связи ООД или коммутационной системы с АПД в X.2I используются восемь цепей, показанных на рис.1.12. Адаптер служит для сопряжения цифрового канала с ООД, являющимся терминалом или ЭBM. Взаимодействие ООД с АПД осуществляется в три этапа: установление соединения, передача данных, разъединение соединения. Сигналы в линиях синхронизации формируются на стороне ООД. Цепь синхронизации байтов может отсутствовать, если перед последовательностью управляющих символов включаются специальные символы синхронизации SYN.
Рассмотрим функционирование интерфейса при установлении соединения по инициативе ООД. ООД или АПД могут начать установление соединения, когда интерфейс находится в состоянии готовности и на всех линиях управления С, I, S и В удерживается состояние логической "1". ООД устанавливает соединение, переводя линию управления из состояния "Выключено" в состояние "Включено", а линию передачи - из состояния "1" в состояние "0". Интерфейс переходит в состояние "Запрос соединения". Когда ООД готово к передаче адресной информации в АПД, оно передает два символа синхронизации и вслед за ним последовательность символов, переводящую интерфейс в состояние выбора. В этом состоянии АПД передает адрес вызываемой АПД и ждет, посылая все единицы. После прохождения вызова АПД отвечает сигналом о процессе установления соединения, изменяя в линии. индикации состояние "Выключено" на состояние "Включено.
На этапе обмена данными происходят передача данных между двумя АПД до тех пор, пока одно из них не выдаст запрос на разъединение, изменяя состояние линии управления С на состояние "Выключено''. AПД производит разъединение и переводит линию индикации в состояние "Выключено". Линии приема и передачи переходят в состояние постоянной "1". Интерфейс находится в состоянии готовности.
|
|
|
Если на этапе установления соединения поступает входящий запрос, то он отклоняется.
Для выделенных каналов процедуры, определяемые в X.2I, более просты: признаком запроса на передачу данных является изменение состояния в линии управления или в линии индикации. Когда обе линии изменят свое состояние на состояние "Включено", интерфейс переходит к этапу передачи данных.
Стыки C1
Стык C1 применяется в УПС при работе по физическим линиям и выполняет следующие функции: устанавливает независимо от состава АПД параметры сопряжения с физическими линиями (ФЛ), обеспечивает гальваническую развязку цепей АПД и ФЛ, обеспечивает преобразование уровней сигналов. Классификация стыков определяется типом линий и применяемым кодом.
Физические линии могут быть четырехпроводными и двухпроводными, симметричными и несимметричными, коммутируемыми и некоммутируемыми, гальванически связанными и гальванически развязанными с устройствами приема: и передачи.

|
| Рис.1.14. Однопроводная линия |
Примерами наиболее распространенных стыков (последовательных интерфейсов периферийных устройств) являются интерфейсы RS -232C, RS-429A, RS-422A (ГОСТ 23675-79) и С1-ФЛ. В основе интерфейсов RS-232C и RS-429А лежит однопроводная несогласованная линия (рис.1.14), пo которой информация передается двухполярными посылками со скоростью до 20 Кбод (RS-232С) и 300 Кбод (RS—423)при длине линии не более 15 и 600 м соответственно. Однопроводная линия отличается простотой, но имеет единственный недостаток – низкую помехоустойчивость.
Интерфейс RS-422 (ГОСТ 23675-79) строится на симметричных линиях (витой паре, радиочастотном кабеле) и дифференциальных приемниках и передатчиках (рис. 1.15). Сигнал передатчика появляется на входе приемника в виде парафазного (разностного) напряжения. Помехи в линии остаются синфазными. Благодаря этому дифференциальный приемник обладает высокой помехоустойчивостью. Возможна передача информации на расстояние до 1200 м со скоростью до 100 Кбод и на расстояния до 12 м со скоростью 10 Мбод.

|
| Рис.1.15. Симметричная линия |
Интенсивность помех в линиях пропорциональна длине линии связи и ширине полосы рабочих частот. Поэтому длина линии и скорость передачи ограничены. Зависимость максимальной длины кабеля от скорости передачи приведена на рис. 1.16. График построен на основе эмпирических данных с использованием телефонного кабеля со скрученными парами и диаметром провода 0,51 мм
|
|
|

|
| Рис.1.16. Зависимость длины кабеля от скорости передачи |
График 1 относится к случаю несогласованной линии, график 2 - к случаю применения схемы согласования. Скорость передачи выбирается такой, чтобы время переходного процесса из одного логического состояния в другое было равно половине длительности элемента сигнала. Длина кабеля ограничена 1200 м, при этом потери по мощности составляют 6 дБ. Гальваническая развязка обеспечивается выходным и входными формирователями каналов связи. Онапозволяет исключить уравнительные токи по общим проводникам и тем самым уменьшить взаимовлияние отдельных устройств. Для гальванической развязки применяют трансформаторы или оптроны. Пример схемы оконечных формирователей сигнала на входе и выходе канала связи с гальванической развязкой на трансформаторах приведены на рис.1.17. Сопротивления R1 a R 2 выбираются из условия согласования волнового сопротивления кабеля и входного сопротивления оконечного формирователя. Диоды используются для ограничения выбросов напряжения на линии, превышающих величину  .
.

|
| Рис.1.17. Пример схемы оконечных формирователей сигнала |
Пример схемы гальванической развязки на основе оптрона показана на рис. 1.18. Сопротивление резистора R1 выбирается из условия обеспечения номинального тока включения
оптопары. Резистор R2 и преобразователь уровня 564ПУ4 необходимы для согласования выхода линии с входами микросхем. Можно использовать оптронный переключатель 249АП1 со встроенным инвертором.
Для последовательной передачи двоичных сигналов применяют двухполюсные сигналы низкого уровня (НУ), двухполюсные сигналы низкого уровня с относительным кодированием (ОНУ), биимпульсные сигналы, или код Манчестер-2, квазитроичные сигналы (КИ). Например, для стыка С1-ФЛ различают четыре типа: С1-ФЛ-НУ, С1-ФЛ-ОНУ, С1-ФЛ-БИ. Временные диаграммы информационного сигнала (ИС) и сигналов в линии показаны на рис.1.19.
|
|
|

|
| Рис.1.18. Пример схемы гальванической развязки на основе оптрона |
При двухполярном сигнале "1" соответствует положительное напряжение, "0"- отрицательное напряжение. Сигнал занимает полосу частот от  до
до  , где
, где  - тактовая частота. При относительном кодировании "1" передается отсутствием изменения полярности предшествующего бита, а "0" - изменением полярности сигнала.
- тактовая частота. При относительном кодировании "1" передается отсутствием изменения полярности предшествующего бита, а "0" - изменением полярности сигнала.
При передаче биимпульсными сигналами каждый бит передается двумя посылками так, что в середине каждого бита имеется переход. Логическая "1" передается импульсом положительной полярности, а затем отрицательной. Логический "0" передается импульсом отрицательной полярности, а затем положительной. Возможно применение относительного кодирования, при котором смена порядка следования полярностей измеряется всякий раз при передаче логического "0". Биимпульспые сигналы, обладаютболее высокой помех устойчивостью.

| 
|
| Рис.1.19. Временные диаграммы линейных сигналов. | Рис.1.20. Пример схемы согласования уровней. |

| 
|
| Рис.1.21. Схема преобразования уровней с гальванической развязкой: выходной низкий уровень. | Рис.1.22. Схема преобразования уровней с гальванической развязкой: выходной высокий уровень. |
Полоса частот этого сигнала лежит в пределах от до . У него отсутствует постоянная и низкочастотная составляющие. Имеется возможность обнаружить ошибку в каждом передаваемом разряде, поскольку в середине каждого бита должен быть переход. Вероятность одновременной инверсии полярности в пределах бита невелика. Кроме того, упрощается выделение тактовой частоты на приеме, так как в последовательности присутствуют и тактовые, и информационные сигналы. Биимпульсный сигнал обладает свойством самосинхронизации.
При квазитроичном кодировании сигнал в линии может принимать три уровня. На рис.1.19 "нулевые" биты передаются в линию нулевым потенциалом, "единичные" биты передаются посылками с положительной или отрицательной полярностью. При этом каждый "единичный" бит передается полярностью, противоположной предыдущему. Квазитроичный сигнал не имеет постоянной составляющей и его можно передавать через трансформаторы.
Амплитуда сигналов передачи не превышает для С1-НУ и С1-БИ 0,4 В. Для С1-КИ амплитуда сигналов передачи лежит в пределах от 1 до.3 В.. Чем больше скорость передачи, тем больше требуется амплитуда, сигнала.
Для обеспечения совместимости уровней сигналов в линиях и интегральных схемах применяют преобразователи уровней. В тех случаях, когда требуется согласовывать схемы, запитываемыми напряжениями разного знака при большом значении логического перепада в каждой из схем используют ключевые транзисторные схемы. Для примера рассмотрим схемы, работающие на принципе переключения тока. Принцип переключения тока иллюстрируется схемой, показанной на рис. 1.20. Изменение входного напряжения по отношению к опорному Е0, приводит к переключению тока из коллектора цепи транзистора V1 в цепь коллектора транзистора V2 и наоборот. Величина опорного напряжения выбирается равной  , где
, где  - уровень напряжения логического "нуля",
- уровень напряжения логического "нуля",  - уровень напряжения логической единицы". Если
- уровень напряжения логической единицы". Если  В, а
В, а  В, то
В, то  В.
В.
|
|
|
Для преобразования уровней при одновременной гальванической развязке используют оптронные переключатели. Примеры схем приведены на рис. 1.21 для преобразования уровней тока линии связи в уровни ТТЛ-схем и на рис. 1.22 показана схема преобразования уровней ТТЛ-схем в двухполярные сигналы телеграфных каналов, реализуемая в стыке С1-TГ.
3. Основы эффективного кодирования.
Задача статистического кодирования, которую часто приходится решать в технике документальной электросвязи формулируется следующим образом. Пусть имеется сообщение, записанное с помощью букв некоторого алфавита A={a1,a2,...,aк}, содержащего К букв. Алфавит А назовем входным. Требуется закодировать это сообщение, т. е. указать правило, которое сопоставляет каждой букве алфавита последовательность из символов «0» и «1». Выбранный код, во-первых, должен обеспечивать возможность однозначного декодирования, т. е. позволять по принятой последовательности символов «0» и «1» однозначно восстановить переданное сообщение (букву). Во-вторых, на передачу сообщения в среднем должно быть затрачено минимальное число нулей и единиц, что позволит передать за единицу времени максимальное число сообщений.
Таблица 2.1.
| A | Код 1 | Код 2 | Код З |
| a1 | |||
| a2 | |||
| a3 |
Пример 1. Пусть A={a1, а2, a3}. Некоторые возможные коды для букв алфавита А представлены в табл.1.
Код 1 не является однозначно декодируемым кодом. Для доказательства этого рассмотрим, например, двоичную последовательность 0101. Она может быть декодирована одним из сообщений: а2а1а2a1; а3a3; а2a1а3; a3a2a1. Код 2 декодируется однозначно, поскольку все кодовые слова этого кода имеют равные длины и различны. Код 3 также однозначно декодируемый, поскольку никакое его кодовое слово не является началом {префиксом} другого кодового слова.
Код, обладающий тем свойством, что никакое более короткое слово не является началом другого более длинного слова кода, называют префиксным. Префиксные коды всегда однозначно декодируемы.
Кодовое дерево для множества кодовых слов. Наглядное графическое изображение множества кодовых слов можно получить, установив соответствие между сообщениями и концевыми узлами двоичного дерева. Пример двоичного дерева изображен на рис. 1. Две ветви, идущие от корня дерева к узлам первого порядка, соответствуют выбору между «0» и «1» в качестве первого символа кодового слова: левая ветвь соответствует «0», а правая—«1». Две ветви, идущие из узлов первого порядка, соответствуют второму символу кодовых слов, левая означает «0», а правая—«1» и т. д. Ясно, что последовательность символов каждого кодового слова определяет необходимые правила продвижения от корня дерева до концевого узла, соответствующего рассматриваемому сообщению.
Формально кодовые слова могут быть приписаны также промежуточным узлам. Например, промежуточному узлу второго порядка на рис. 2.1 можно приписать кодовое слово 11, т. е. первые два символа кодовых слов, соответствующих концевым узлам, порождаемых этим узлом. Однако кодовые слова, соответ ствующие промежуточным узлам, не могут быть использованы для представления сообщений, так как в этом случае нарушается требование префиксности кода

| 
|
| Рис.2.1 Пример двоичного кодового дерева | Рис.2.2 Кодовые деревья для кодов 2(а) и 3 (б) |
Требование, чтобы только концевые узлы сопоставлялись сообщениям, эквивалентно условию, чтобы ни одно из кодовых слов не совпало с началом (префиксом) более длинного кодового слова. Любой код, кодовые слова которого соответствуют различным концевым вершинам некоторого двоичного дерева, является префиксным, т. е. декодируемым.
На рис. 2.2 изображены кодовые деревья, соответствующие кодам 2 и 3 (см. табл. 2.1).
Вернемся к рассмотренному ранее примеру 1. Пусть вероятность появления в сообщении буквы a1 равна 0,2; буквы a2 — 0,3; a3—0,5. Тогда среднее число двоичных символов, приходящихся на одну букву для кода 3 составляет 0,2*1+0,3*2+0,5*3=2,3, а для кода 2-0,2*2+0,3*2+0,5*2= 2,0, т. е. код 2 в среднем экономичнее кода 3.
Рассмотрим еще один код—код 4, который букве a1 ставит в соответствие 10; a2 — 11; a3—0. Среднее число двоичных символов, приходящихся на одну букву этого кода: 0,2*2+0,3*2+0,5*1 =1,5, т. е. код 4 экономичнее и кода 3, и кода 2. Спрашивается, можно ли предложить код, который будет экономичнее кода 4? Как построить самый экономичный код для данного сообщения? Ответы на эти и многие другие вопросы дает основная теорема кодирования, сформулированная и доказанная впервые К. Шенноном.
Пусть буквы a i, i=  , входного алфавита А порождаются независимо с вероятностью pi, т. е. р(аi)=рi, некоторым источником сообщений. Количество информации, приходящееся на сообщение ai, равно—log2pi. Среднее количество информации в битах на одно сообщение (букву) обозначается Н(А) и называется энтропией источника сообщений
, входного алфавита А порождаются независимо с вероятностью pi, т. е. р(аi)=рi, некоторым источником сообщений. Количество информации, приходящееся на сообщение ai, равно—log2pi. Среднее количество информации в битах на одно сообщение (букву) обозначается Н(А) и называется энтропией источника сообщений
 (2.1)
(2.1)
Энтропию Н(А) можно рассматривать как меру «неопределенности» сообщения до того, как оно было принято.
В приведенной ниже основной теореме кодирования устанавливается связь между Н(А) и средним числом  символов «0» и «1» в кодовом слове.
символов «0» и «1» в кодовом слове.
Теорема 1. Для любого однозначно декодируемого кода всегда выполняется неравенство ³H(A) и существует однозначно декодируемый код, для которого выполняется неравенство <H(A)+1.
Теорема 1 имеет глубокий смысл. В частности, из нее следует, что нельзя закодировать сообщение таким образом, чтобы средняя длина кодовых слов была меньше, чем энтропия сообщений. Кроме того, теорема утверждает, что существует кодирование, при котором средняя длина кодового слова немногим отличается от энтропии сообщения. Покажем, что среднее число символов на сообщение можно уменьшить, если кодировать не каждую букву в отдельности, а блоки по п букв из алфавита А. Пусть буквы алфавита А появляются независимо с вероятностями р1,...,рK. Множество всех блоков длины п в алфавите А обозначим An. Как хорошо известно,
H(An)=nH(A). (2.2)
Обозначим среднее число «0» и «1», приходящихся на один блок из п букв, взятых из алфавита A, через n. Тогда среднее число символов, приходящихся на одну букву алфавита, определяется формулой
= n/n (2.3)
Теорема 2. При любом сколь угодно малом положительном eможно найти натуральное число N, такое, что среднее число символов на одно сообщение при n >N удовлетворяет неравенству
<H(A)+e (2.4)
Наоборот невозможно найти натуральное число N и однозначно декодируемый код, такие, чтобы выполнялось неравенство
<H(A). (2.5)
Доказательство. Эта теорема вытекает из теоремы 1. Подставляя в нее n вместо , получаем
n£H(An)+1. (2.6)
Разделив (6) на n и учитывая (2) и (3), получим
H(A)£ <H(A)+1/n (2.7)
Из неравенства (7) следует неравенство (4), если положить n= 1/e.
В то же время неравенство (5) несовместимо с неравенством (7). Теорема доказана.
Из теоремы 2 следует, что, используя кодирование блоков, можно получить среднее число символов на сообщение (букву), сколь угодно мало отличающееся от энтропии, но при этом увеличивается сложность кодирования.
4. Сопряжение источников дискретных сообщений с синхронным дискретным каналом.
Общие положения. В последние годы все большее распространение получают системы ПДС с временным разделением каналов. При этом групповой канал является синхронным и возникает задача сопряжения источников дискретных сообщений с синхронным каналом. Задачу сопряжения выполняют устройства согласования передачи и приема СУпер и СУпр (рис. 2.4). Канал, образовавшийся в результате подключения к синхронному каналу согласующих устройств, назовем каналом ПДС.
Сигнал на выходе источника дискретных сообщений может быть изохронным или анизохронным. Изохронные дискретные сигналы отличаются от анизохронных тем, что для них на приеме заранее известна структура и, в частности, моменты передачи единичных элементов. Изохронные сигналы, поступающие от источника, имеют длительность, кратную t0, и характеризуются скоростью телеграфирования Bи. Анизохронные сигналы могут иметь любую длительность, но не менее чем tmin. При этом максимальная скорость телеграфирования источника Bи=l/tmin<<Bс—скорости модуляции в синхронном канале.
Основными характеристиками источника дискретных сообщений с дискретным синхронным каналом являются: коэффициент использования синхронного канала h, который будем определять отношением Ви/Вс, и сложность аппаратурной реализации.
Согласование дискретных сигналов анизохронной структуры с синхронным каналом. Согласующее устройство на передаче обеспечивает преобразование исходного анизохронного сигнала в изохронный, на приеме осуществляется обратное преобразование. Таким образом, создается асинхронный канал ПДС. За возможность передавать по дискретному синхронному каналу сигналы анизохронной структуры приходится расплачиваться уменьшением коэффициента использования синхронного канала или в многоканальных системах—уменьшением числа дискретных асинхронных каналов по сравнению с исходным числом синхронных.
В технике ПДС нашли применение два метода согласования сообщений анизохронной структуры с синхронным каналом: метод наложения и метод скользящего индекса с подтверждением.
Метод наложения — наиболее простой из известных методов согласования сообщений анизохронной структуры с синхронным каналом. При этом методе согласования используется импульсная несущая, которая модулируется передаваемым сигналом, т. е. осуществляется амплитудно-импульсная модуляция.
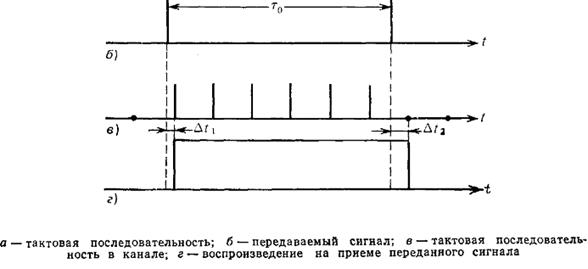
Каждая посылка (рис.2.5,б) как бы накладывается на импульсную несущую (рис. 2.5,а). В результате в канал либо поступает пачка им пульсов несущей (рис. 2.5,в), если на нее накладывается токовая посылка, либо импульсы несущей в канал не проходят, если накладывается бестоковая посылка. В качестве модулятора можно использовать ключ, который управляется (отпирается или запирается) поступающими от источника анизохронными сигналами.

|
| Рис.2.4. Сопряжение источника и получателя дискретных сообщений с синхронным каналом. |
На приемной стороне каждая пачка импульсов несущей преобразуется в токовый элемент (посылку) соответствующей длительности (рис. 2.5,г). При воспроизведении элементов на приеме возникают краевые искажения, обусловленные тем, что источник сообщений и генератор импульсной несущей на передаче не синхронизированы. Эти искажения будут тем меньше, чем больше частота следования импульсов несущей, т. е. чем больше размещается импульсов несущей на интервале времени tmin. Очевидно, что при одной и той же частоте следования импульсов несущей величина искажений будет зависеть от скорости телеграфирования Ви. Величина искажений, %, определяется выражением
 , (2.9)
, (2.9)
где  Dt — интервал времени между двумя соседними импульсами несущей, определяющий скорость передачи импульсной последовательности Вс. Очевидно, что Вс=fн, где fн—частота импульсной последовательности.
Dt — интервал времени между двумя соседними импульсами несущей, определяющий скорость передачи импульсной последовательности Вс. Очевидно, что Вс=fн, где fн—частота импульсной последовательности.
|
| Рис.2.5. Метод наложения. |
Пример 5. Пусть скорость модуляций импульсной последовательности в синхронном канале Вс=5000 Бод или 5000 имп./с, а допустимые искажения d=1%. Требуется определить максимально возможную скорость телеграфирования в асинхронном канале и коэффициент использования канала. Из формулы (2.3) имеем Bи=Bcd/100=50 Бод. Коэффициент использования синхронного канала h=0.01
В многоканальных системах необходима цикловая синхронизация (фазирование). Обычно для передачи специальных сигналов, по которым производится цикловая синхронизация, выделяется специальный канал. При этом скорость телеграфирования в синхронном канале, обеспечивающем передачу сигналов от N источников анизохронных сигналов с искажениями не более d%, Bc=Bn(N+1) 100/d. Так, при организации 12 телеграфных каналов со коростью передачи до 200 Бод и искажениями до 4% скорость передачи в синхронном (групповом) канале должна составлять Вс=200(12+1) 100/4==65*103 Бод. Такая скорость телеграфирования принята в аппаратуре ТВУ-12.
При согласовании методом наложения токовому элементу сигнала соответствует n=t/Dt импульсов несущей, где t—длительность посылки. При этом можно считать, что первый импульс несет информацию о передаче токового элемента, остальные (п— 1) импульсов являются импульсами подтверждения. Необходимость их передачи диктуется соображениями помехоустойчивости и желанием передать анизохронные сигналы с краевыми искажениями, не превышающими заданные. Коэффициент использования синхронного канала при методе наложения не превышает величины h =d/100.
Для организации прозрачных (кодонезависимых) каналов с лучшим использованием пропускной способности синхронного канала при искажениях, не превышающих заданное значение, можно использовать метод, основанный на следующих соображениях. На приемный конец необходимо передать информацию о знаке посылки и местоположении ЗМ. При этом местоположение ЗМ можно задать с определенной точностью, которая будет определяться допустимыми индивидуальными краевыми искажениями. Если расстояние между импульсами несущей Dt, то при методе наложения, как известно, краевые искажения определяются формулой (9), т. е. зависят только от Dt и tmin. Если разбить интервал Dt на l зон и фиксировать попадание ЗМ в каждую из этих зон, то можно, передавая по каналу информацию о номере зоны, уменьшить искажения в l раз, т. е.
 (2.10)
(2.10)
Если передавать информацию о номере зоны двоичным кодом, то потребуется k=log2l единичных элементов. Именно поэтому значение l выбирается кратным двум. Так, при l=2 на передачу информации о номере зоны потребуется один элемент (импульс несущей), а при l=4—два. Если после передачи информации о знаке посылки и номере зоны, в которую попал ЗМ, знак передаваемой посылки не изменился, то далее передается элемент или несколько элементов подтверждения, совпадающих с первым (стартовым) элементом. Описанный выше метод получил название метода скользящего индекса с подтверждением (СИП). При методе СИП величина искажений
 (2.11)
(2.11)
Сравнивая (9) и (11) при заданных Ви и Вс, видим, что при использовании метода СИП удается уменьшить искажения в 2k раза при том же коэффициенте использования синхронного канала или при заданной величине искажений увеличить коэффициент использования синхронного канала в 2k раз по сравнению с методом наложения. При заданной величине искажений можно вычислить отношение Ви/Вс. Так, при d=8,33% это отношение для l=4 составляет 1/3. Откуда следует, что при d=8,33% для получения одного асинхронного канала требуется объединение трех синхронных.
Недостатком метода СИП является размножение ошибок. Одиночная ошибка в синхронном тракте может вызвать несколько ошибок на приеме. Метод СИП используется в аппаратуре ДАТА, ДУМКА, ДАТА-2-7 и в аппаратуре ТВР. При этом кодирование номера зоны в современной аппаратуре (ДУМКА, ТВР) осуществляется в соответствии с рекомендациями МККТТ (табл. 2.7).
Таблица 2.7
| Стартовый элемент | Уточняющий элемент | Зона | ||||
| Sl S2 | ||||||
| Sl S2 | ||||||

| ||||||
| Рис.2.6 Метод скользящего индекса с подтверждением. |
На рис. 2.6 показан процесс передачи и приема посылок при применении метода СИП и кодировании в соответствии с табл. 2.8. Передаваемая последовательность содержит токовую и бестоковую посылки (рис.2.6, а). Импульсы тактовой последовательности (рис.2.6 ,6) расположены друг от друга на расстоянии Dt и этот промежуток времени разбит на четыре зоны с номерами 1... 4. Первый ЗМ попадает в зону 2, второй ЗМ попада ет в зону 3. Эти зоны на рис. 2.6,б заштрихованы. В синхронный канал посылается кодовая комбинация 110, в которой первый элемент является стартовым, а два последующих уточняют местоположение 3M1. Для ЗМ2 в синхронный канал посылается комбинация 010 (рис. 2.6,а) и далее следуют импульсы подтверждения, совпадающие по знаку со стартовыми. На приеме (рис. 2.6,г) регистрируется посылка в соответствии с информацией, поступающей из канала..
Согласование дискретных сигналов изохронной структуры с синхронным каналом. Для сигналов изохронной структуры значащие моменты строго определены и необходима лишь привязка ЗМ сигналов, поступающих от источника, и ЗМ сигналов, передаваемых в синхронном канале. Для передачи изохронных сигналов по синхронному каналу необходимо, чтобы скорость поступления единичных элементов была меньше частоты тактовых импульсов синхронного канала либо равна ей (Ви£Вс). В случае равенства Ви£Вс можно организовать только одноканальную передачу. Для организации N каналов необходимо обеспечить Ви£(Вс /N).
Рассмотренные ранее методы согласования сообщений анизохронной структуры с синхронным каналом применимы и для согласования сигналов изохронной структуры с синхронным каналом. Однако, как было показано выше, они не позволяют эффективно использовать синхронный канал. Поэтому получили распространение методы согласования, использующие информацию об известной структуре изохронного сигнала, характеризуемого определенной постоянной скоростью поступления единичных элементовВи. Среди известных методов наибольшее практическое применение получил метод стаффинга (метод вставок). Различают односторонний стаффинг, который в свою очередь может быть подразделен на «+стаффинг» и «—стаффинг»; двусторонний стаффинг (±стаффинг). Сущность этих методов проиллюстрирована на рис. 2.7 («+стаффинг»), где показаны последовательности: передаваемая (рис. 2.7,а) и тактовая последовательность синхронного канала (рис. 2.7,б).

|
| Рис.2.7. Метод стаффинга. |
Пусть в некоторый момент tо ЗМ передаваемого сигнала и тактовой последовательности совпадут. Вследствие того, что Ви<Вс, фазовое расхождение между последовательностями через некоторое время достигает величины одного такта последовательности б). Если каждому элементу сообщения а) поставить в соответствие один элемент тактовой последовательности б), то за время Т в последней окажется один лишний элемент. Для обеспечения правильного приема считывание этого лишнего элемента на приеме запрещается специальной кодовой комбинацией, передаваемой по специальному дополнительному каналу.
При Ви>Вс применяют «—стаффинг». В этом случае «лишний» элемент образуется в передаваемом сообщении, поэтому он в сопровождении специальных команд передается по дополнительному каналу. При выборе Ви=Вс вследствие нестабильности скоростей возникают ситуации, когда Ви<Вс или Ви>Вс, поэтому в зависимости от сложившихся условий передачи применяют как «+стаффинг», так и «—стаффинг». Отсюда название «двусторонний стаффинг».
Согласование источника стартстопных сигналов с синхронным каналом. Стартстопные сигналы относятся к сигналам известной структуры. Они занимают промежуточное положение между изохронным и анизохронными сигналами. Момент появления старт-стопного сигнала на приеме неизвестен, но после появления старт-стопного перехода нетрудно предсказать появление ЗМ внутри стартстопной кодовой комбинации. Знание структуры стартстопного сигнала упрощает задачу сопряжения источника стартстопных сигналов с синхронным каналом и позволяет существенно повысить коэффициент использования синхронного канала по сравнению со случаем, когда передаваемые сообщения имеют четко выраженную анизохронную структуру.
Передача стартстопных сигналов осуществляется следующим образом. Поступающий от ИС стартстопный сигнал регенерируется устройством, принцип действия которого аналогичен работе приемника телеграфного аппарата. Каждая стартовая посылка отмечает начало стартстопного цикла и по стартстопному переходу формируются импульсы стробирования, соответствующие серединам принимаемых информационных сигналов в данном телеграфном знаке. Например, при работе кодом МТК-2 со скоростью 50 Бод формируется семь импульсов стробирования, относящих друг от друга на 20 мс, первый из которых отстоит на 10 мс от стартстопного перехода. Регенерированный сигнал запоминается в промежуточных накопителях и затем считывается из них распеделителем. Таким образом формируется изохронный сигнал, который может быть передан по синхронному каналу.
Для передачи стартстопных сигналов со скоростью 50 Бод кодом МТК-2 достаточно иметь импульсную несущую последовательность, имеющую скорость 50…51 имп./с. Таким образом, в одном и том же синхронном канале кодозависимых каналов может быть организованно в 3 раза больше, чем кодонезависимых с d=8,33% и использованием метода СИП.
5. Синхронизация в синхронных и стартстопных системах передачи данных.
Общие положения. Синхронизация есть процесс установления и поддержания определенных временных соотношений между двумя и более процессами. Различают поэлементную, групповую и цикловую синхронизацию.

|
| Рис. 4.1. Формирование элементов кодовых комбинаций при синхронном методе передачи |
В соответствии с определением элементная, групповая и цикловая синхронизация — это синхронизация переданного и п
|
|
|
