 |


I. Двигатель как объект управления
|
|
|
|
 |
Двигатель является подсистемой системы «автомобиль». Автомобиль в свою очередь сам является подсистемой системы «водитель-автомобиль-местность-среда» (системы «ВАМС, рис.1.2.1)
Рис. 1.2.1 Система «водитель-автомобиль-местность-среда»
Водитель – центральная фигура в этой системе. Он управляет автомобилем, т.е. воздействует на него через органы управления. Автомобиль воздействует на водителя: тряска, сопротивление перемещению педалей, шум и т.д. Автомобиль воздействует на местность (дорогу), делает колею, разбивает дорогу. Местность отвечает автомобилю тем же. Например, межремонтный пробег автомобиля при движении по ухабистым дорогам сокращается приблизительно в 1,5 раза. Автомобиль отравляет среду. Но среда коррозирует автомобиль. Её некоторые факторы существенно влияют на работу двигателя: влажность, давление, температура воздуха, пыль и т.д.
Местность воздействует на водителя. Главное влияние оказывает на водителя дорожная обстановка. Но и сама местность оказывает на водителя существенное влияние. Например, немецкий и киргизский ученые Хайр и Таманна вывели закономерность влияния глубины обрыва, расположенного рядом с дорогой, на скорость движения (Рис.1.2.2).
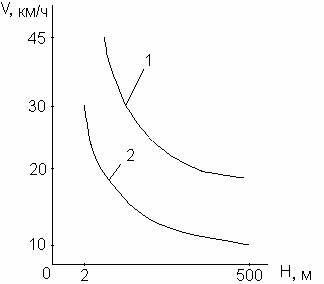
Рис. 1.2.2 Влияние глубины обрыва вдоль дороги на скорость движения:
1- с бордюром; 2- без бордюра
Среда также воздействует на водителя (видимость атмосферы, грязь, дождь, туман, снег).
Водитель, как известно, управляет автомобилем, воздействуя на органы управления. Через рулевое управление он изменяет траекторию движения, с помощью тормозной системы уменьшает скорость движения и останавливает его. Однако тормозной системой водитель пользуется значительно меньше времени, чем системой управления двигателем. Водитель выбирает скорость движения в зависимости от состояния и сочетания факторов, действующих в системе «ВАМС». Основными из этих факторов являются факторы дорожной обстановки. Факторы, действующие в системе «ВАМС», в том числе и дорожной обстановки, носят случайный характер. Следовательно, и скорость движения автомобиля тоже имеет случайный характер. Автомобиль испытывает разгоны, замедления и редко, очень редко, движение с постоянной скоростью (если говорить строго, автомобиль никогда не движется с постоянной скоростью, рис. 1.2.3).
|
|
|
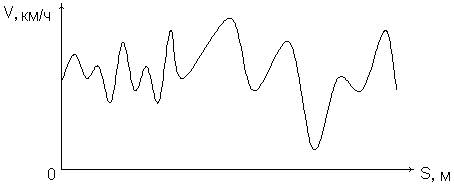
Рис. 1.2.3 Скорость движения автомобиля.
Маховик двигателя жёстко связан с колёсами. Следовательно, скоростной и нагрузочный режимы работы двигателя должны постоянно меняться, и соответствовать желаемой для водителя скорости движения. Иногда это несоответствие имеет место. Например, при экстренном торможении, во избежание поломки трансмиссии, вследствие наличия огромной кинетической энергии маховика, сцепление пробуксовывает, т.е. срабатывает как предохранительная муфта.
Другим примером является работа двигателя в режиме принудительного холостого хода. В это время дроссельная заслонка прикрыта, а частота вращения коленчатого вала выше его самостоятельного холостого хода (торможение двигателем, движение накатом, при переключении передач). В это время расходуется кинетическая энергия автомобиля, но имеет место расход топлива.
Водитель управляет работой двигателя с помощью педали управления (педали «газа»). Нажал сильнее – поехал быстрее, приотпустил – поехал медленнее. Но непосредственно управляют работой двигателя, его внутренними процессами, системы управления: подачей топлива, зажиганием (или впрыска для дизелей), частотой работы на холостом ходу (х/х), токсичности отработавших газов, контроля детонации и др. Все они объединяются в электронную систему автоматического управления (ЭСАУ) (рис.1.2.4)
|
|
|
 |
Рис. 1.2.4. Схема управления автомобильным двигателем:
ЭСАУ – электронная система автоматического управления; ДИ – датчики
импульсов; ИУ – исполнительные устройства; ИД – импульсы датчиков;
УИ – управляющие импульсы; КП – коробка передач; Va – скорость
движения автомобиля.
Схема двигателя как объекта управления показана на рис. 1.2. 5.
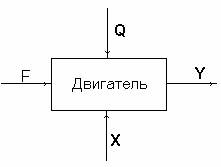
Рис.1.2.5 Схема двигателя как объекта управления: F- управляющий пара-метр; Q - вектор внешних параметров; X -вектор внутренних параметров;
Y -вектор выходных параметров.
Водитель задаёт скоростной и нагрузочный режимы двигателя путём изменения управляющего параметра F (угла открытия дроссельной заслонки). Вектор выходных параметров Y включает в себя крутящий момент Ме, показатель топливной экономичности ge, токсичности отработавших газов и многие другие.
Примечания: 1. Под выражением вектор следует понимать набор параметров (характеристик) в пространстве. Если обозначено  , или Х, то это следует понимать Х =Х1, Х2, … Хn;
, или Х, то это следует понимать Х =Х1, Х2, … Хn;
2. С точки зрения двигателя в целом параметры θ, G в,Gт, Gог ,-являются внутренними параметрами. Но для непосредственно двигателя, для его рабочих цилиндров они являются входными параметрами.
Внутренние параметры подразделяются на:
· командные (входные). Через них ЭСАУ управляет внутренними процессами в двигателе. К ним относятся: θ – угол опережения зажигания; G в – расход воздуха; Gт – цикловой расход топлива; Gог – количество рециркулировавших газов и др.;
· не командные – параметры, характеризующие техническое состояние двигателя и «не входящие в подчинение блока управления ЭСАУ»: нагар на свечах зажигания, величина зазора между торцом клапана и толкателем, износ поршневых колец, качество масла, момент затяжки шпилек головки блока цилиндров и многие другие.
К вектору внешних параметров относятся температура окружающего воздуха, атмосферное давление, влажность и запылённость воздуха, и другие (например, свойства топлива и масла).
С точки зрения теории автоматического управления ДВС обладает рядом особенностей:
|
|
|
1. Дискретный характер протекания рабочего процесса. Этот характер обусловлен повторяемостью его рабочих циклов.
2. Многомерность. Это объясняется следующим:
а). Каждый входной параметр действует одновременно на несколько выходных параметров;
б). Большое количество различных параметров. Например, вектор внутренних параметров (факторов) включает в себя множество их. Это и конструктивные: различие в степени сжатия отдельных цилиндров, размерах, тепловых расширений деталей, упругости материала деталей, и т.д.; и эксплутационные: различие в изнашиваемости деталей разных цилиндров, нарушение регулировок, изменение проходных сечений каналов и т.д.
Из выше сказанного следует вывод: ЭСАУ должна быть многомерной;
3. ДВС – неоднородный объект. Это означает, что двигатель имеет несколько «элементарных» двигателей-цилиндров, отличающихся геометрией впускного и выпускного трактов, условиями смазки, охлаждения, составом поступающей горючей смеси (например различие коэффициентов избытка и недостатка воздуха может достигать 0,5).
4. ДВС – нестабильный и стохастический объект.
Нестабильность и нестационарность работы двигателя объясняется воздействием на него случайных факторов, как внутренних, так и внешних;
5. Нелинейность. Она заключается в следующем:
а). Зависимости выходных параметров от задающих, внешних и внутренних параметров являются нелинейными математическими моделями;
б). Главная реакция на сумму внешних воздействий не равна сумме реакций на каждое из этих воздействий в отдельности.
6. ДВС – многовариантная система, т.е. эта система имеет множество различных сочетаний параметров. Это привело к большому разнообразию конструкций ДВС.
|
|
|
