 |


Многоковшовые траншейные экскаваторы
|
|
|
|
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ
РАСЧЕТОВ МЕЛИОРАТИВНЫХ МАШИН ПРИ ВЫПОЛНЕНИИ ПРАКТИЧЕСКИХ И ЛАБОРАТОРНЫХ РАБОТ ПО ДИСЦИПЛИНЕ «МАШИНЫ ДЛЯ МЕЛИОРАЦИИ»
Учебное пособие
для студентов, обучающихся по направлению подготовки
23.03.02 Наземные транспортно-технологические комплексы
Донецк – 2016
Министерство образования и науки Донецкой народной республики
Государственное образовательное учреждение
Высшего профессионального образования
«Донецкий национальный технический университет»
Матвиенко С.А.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ
РАСЧЕТОВ МЕЛИОРАТИВНЫХ МАШИН ПРИ ВЫПОЛНЕНИИ ПРАКТИЧЕСКИХ И ЛАБОРАТОРНЫХ РАБОТ ПО ДИСЦИПЛИНЕ «МАШИНЫ ДЛЯ МЕЛИОРАЦИИ»
Рассмотрено
на заседании кафедры горнозаводского транспорта и логистики,
протокол № __ от ___________ г
Утверждено на заседании учебно-издательского совета ДонНТУ, протокол № __ от ___________ г
Донецк – 2016
УДК 372.147.88
Методические указания по выполнению лабораторной работы по дисциплине «Машины для мелиорации» на тему «Устойчивость бульдозеров» для студентов, обучающихся по направлению подготовки 23.03.02 Наземные транспортно-технологические комплексы
ã С.А. Матвиенко, 2016
ãГОУ ВПО «Донецкий национальный технический университет», 2016
| Составители: | С.А. Матвиенко, ст. преподаватель |
| Ответственный за выпуск | В.П. Кондрахин, зав. кафедрой |
| Рецензент |
ОГЛАВЛЕНИЕ
ВЕДЕНИЕ.................................................................….…….4
1. УСТОЙЧИВОСТЬ БУЛЬДОЗЕРОВ……………………………..43
1.1. Скреперы………………………………………………...48
1.2. Автогрейдеры…………………………………………...52
|
|
|
1.3. Одноковшовые экскаваторы…………………………...53
1.4. Многоковшовые траншейные экскаваторы…………...60
1.5. Погрузчики……………………………………………...62
ПРИЛОЖЕНИЯ...............................................………..................65
ВВЕДЕНИЕ
При выполнении статических расчетов студенты встречаются с большими трудностями, так как в учебной литературе отсутствует систематизированное изложение методики, которая учитывала бы схему агрегатирования мелиоративных и строительных машин, не отражены особенности расчетов при транспортном передвижении для машин с прицепным и полунавесным рабочим оборудованием, методически несовершенно изложена последовательность расчета параметров противовеса, а также определения устойчивости машины при транспортном передвижении.
С целью устранения перечисленных недостатков и составлены данные методические указания. Изложение методики сопровождается необходимыми схемами, рисунками.
УСТОЙЧИВОСТЬ БУЛЬДОЗЕРОВ
В процессе работы потеря устойчивости и опрокидывание бульдозера могут произойти при его движении под уклон и внезапной встрече отвала с труднопреодолимым препятствием (рис. 4.1). Столкновение влечет за собой стопорение машины. За счет запаса кинетической энергии машины деформируются препятствие и рабочее оборудование; движитель отрывается от опорной поверхности и центр тяжести машины смещается вверх и вперед. При запертом положении гидроцилиндров бульдозер опрокидывается относительно режущей кромки отвала.
Полагаем, что деформирование рабочего оборудования и препятствия мало в сравнении со смещением центра тяжести машины (см. рис. 4.1). Тогда из условия:
 ,
,
при
 ;
;  ,
,
находим угол наклона поверхности движения бульдозера, при котором возможно опрокидывание:
 ,
,
где  - сила тяжести бульдозера;
- сила тяжести бульдозера;  - скорость движения бульдозера к моменту встречи отвала с препятствием;
- скорость движения бульдозера к моменту встречи отвала с препятствием;  - ускорение свободного падения;
- ускорение свободного падения;  ,
,  - координаты центра тяжести бульдозера относительно ребра опрокидывания.
- координаты центра тяжести бульдозера относительно ребра опрокидывания.
|
|
|


| Рис. 4.1. Схема для определения устойчивости бульдозера в рабочем процессе | Рис. 4.2. Схема для определения продольной устойчивости бульдозера |
Допустимый угол наклона поверхности движения бульдозера в рабочем процессе устанавливают с учетом коэффициента запаса, равного 1,2. Допустимые углы наклона поверхностей движения в транспортном режиме определяются из условий устойчивости, скольжения (сползания) и реализации 100 % мощности двигателя.
При движении передним ходом под уклон (рис. 4.2) с одновременным торможением возможен отрыв задней части движителя бульдозера от опорной поверхности. Опрокидывание происходит относительно точки О. В худшем случае сила взаимодействия движителя с опорной поверхностью:
 .
.
Здесь  - коэффициентсцепления движителя с опорной поверхностью. Из условия
- коэффициентсцепления движителя с опорной поверхностью. Из условия  :
:
 ,
,
где  - сила инерции, прикладываемаяк центру тяжести машины.
- сила инерции, прикладываемаяк центру тяжести машины.
Опрокидывание бульдозера возможно, если:
 .
.
Отсюда получаем:
 .
.
Здесь  , - координаты центра тяжести машины относительно точки О (см. рис 4.2).
, - координаты центра тяжести машины относительно точки О (см. рис 4.2).
Из последнего равенства вытекает, что в ходе торможения при  опрокидывание бульдозера вперед невозможно. Но возможно его сползание по наклонной поверхности, когда
опрокидывание бульдозера вперед невозможно. Но возможно его сползание по наклонной поверхности, когда  .
.
С учетом коэффициента запаса устойчивости, равного 1,2, для машины с гусеничным или пневмоколесным движителем со всеми тормозными колесами предельный угол уклонапо сцеплению находится из выражения:
 . (4.1)
. (4.1)
Для колесных машин спередними тормозными колесами:
 , (4.2)
, (4.2)
где  - база машины;
- база машины;  - коэффициент сопротивления перекатыванию бульдозера. Если только задние колеса тормозные, то:
- коэффициент сопротивления перекатыванию бульдозера. Если только задние колеса тормозные, то:
 , (4.3)
, (4.3)
Когда  , возможно опрокидывание бульдозера относительно точки О (см. рис. 4.2). В этом случае предельный угол уклона определяется равенством:
, возможно опрокидывание бульдозера относительно точки О (см. рис. 4.2). В этом случае предельный угол уклона определяется равенством:
 . (4.4)
. (4.4)
При движении бульдозерана подъем возможно его опрокидывание относительно задних опор или сползание юзом назад. Помимо указанного следует учитывать, что угол подъема ограничивается запасом мощности силовой установки. Предельный угол подъема по условию опрокидывания бульдозера при его движении передним ходом вычисляется с помощью соотношения:
|
|
|
 . (4.5)
. (4.5)
Подъемы, преодолеваемые бульдозером по условию сцепления движителя, определяются видом ходового оборудования: если оно гусеничное или пневмоколесное со всеми ведущими колесами:
 , (4.6)
, (4.6)
когда оборудование пневмоколесное с передней ведущей осью:
 , (4.7)
, (4.7)
если оно пневмоколесное с задней ведущей осью,
 . (4.8)
. (4.8)
В зависимостях(4.6…4.8) - коэффициент сопротивления передвижению.
Предельный угол подъема, преодолеваемого бульдозером при 100 %-ном использовании мощности двигателя, находится из уравнения тягового баланса:
 Рис. 4.3. Схема для определения поперечной устойчивости
Рис. 4.3. Схема для определения поперечной устойчивости
бульдозера
 .
.
Здесь  - мощность двигателя, кВт;
- мощность двигателя, кВт;  - к.п.д. трансмиссии и ходового оборудования тягача; - сила тяжести бульдозера, кН; - скорость движения бульдозера на низшей передаче коробки передач, м/с.
- к.п.д. трансмиссии и ходового оборудования тягача; - сила тяжести бульдозера, кН; - скорость движения бульдозера на низшей передаче коробки передач, м/с.
Приняв, что  , получим формулу:
, получим формулу:
 . (4.9)
. (4.9)
Поперечная устойчивость бульдозера (рис. 4.3) оценивается по условиям опрокидывания на наклонной поверхности либо при движении на закругленных участках дорог, а также исходя из потери сцепления движителя с дорогой.
Допустимый угол поперечного уклона по условию опрокидывания определяется из выражения:
 , (4.10)
, (4.10)
где  - колея тягача;
- колея тягача;  - эксцентриситет центра тяжести относительно продольной оси машины; - высота центра тяжести.
- эксцентриситет центра тяжести относительно продольной оси машины; - высота центра тяжести.
Допустимый угол поперечного уклона по условию сцепления движителя с дорогой находят с помощью равенства:
 . (4.11)
. (4.11)
Коэффициент запаса устойчивости при движениина закруглениях дороги по условию опрокидывания:
 . (4.12)
. (4.12)
Здесь  - радиус закругления дороги; - ускорение свободного падения; - скорость движения.
- радиус закругления дороги; - ускорение свободного падения; - скорость движения.
Коэффициент запаса поперечной устойчивости при движении на закруглениях дороги по условию сцепления движителя:
 . (4.13)
. (4.13)
Используя результаты расчетов, в техническую характеристику бульдозера вносят наименьшие из полученных предельных углов продольной и поперечной устойчивости.
Скреперы
Устойчивость самоходного пневмоколесного скрепера к одноосному тягачу. Так же, как и у бульдозера на пневмоколесном ходу, опрокидывание скрепера возможнопри его движении под уклон,наподъем,при прохождении закругленных участков пути. Может происходить сползание машины юзом. Угол подъема ограничивается сцепными качествами движителя и запасом мощности двигателя. В этой связи предельные углы уклонов и подъемов, преодолеваемые скрепером, и коэффициенты запаса устойчивости рассчитываются по соотношениям (4.1) - (4.9) с учетом местоположения тормозов и приводных колес.
|
|
|

Рис. 4.4. Схема для определения устойчивости скреперанакосогоре
Кроме того, рассматривается устойчивость скрепера при его движении на косогоре. Опрокидывание скреперной части машины может произойти относительно оси, проходящей через шарнир сочленения тягача с рамой скрепера и центральную точку контакта одного из задних колес с опорной поверхностью (рис. 4.4). Предельный угол наклона косогора для скрепера вычисляется из соотношения:
 . (4.14)
. (4.14)
Устойчивость полуприцепного скрепера к двухосному тягачу.
Обычно такие скреперы (рис. 5.16) имеют все тормозные колеса, а ведущими являются колеса тягача. Предельный угол подъема по условию опрокидывания тягача назад находят с помощью формулы:
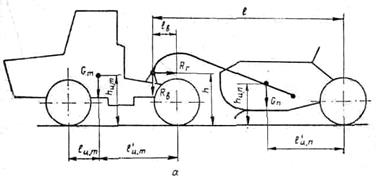

Рис. 4.5. Схема для определения устойчивости полуприцепного скрепера к двухосному тягачу
 , (4.15)
, (4.15)
где  ,
,  - силы тяжести тягача и прицепа; - коэффициент сопротивления движению. Геометрические параметры обозначены на рис. 4.5.
- силы тяжести тягача и прицепа; - коэффициент сопротивления движению. Геометрические параметры обозначены на рис. 4.5.
Предельный угол подъема, преодолеваемый по условию сцепления движителя с дорогой, определяется из формулы:
 . (4.16)
. (4.16)
Предельный угол подъема из условия 100 %-ной реализации мощности двигателя рассчитывается по соотношению (4.9) с учетом равенства  . Предельный угол уклона по опрокидыванию тягача вперед (рис. 4.5) устанавливают из соотношения:
. Предельный угол уклона по опрокидыванию тягача вперед (рис. 4.5) устанавливают из соотношения:
 . (4.17)
. (4.17)
Предельный уклон и поперечный угол по сцеплению движителя устанавливают по равенствам (4.1), (4.11). Предельный поперечный угол опрокидывания тягача вычисляют, пользуясь выражением:
 . (4.18)
. (4.18)
Предельный угол косогора находят по соотношению (4.14). Коэффициент запаса устойчивости по опрокидыванию при прохождении закругленных участков дорог (см. рис. 4.5)
 ; (4.19)
; (4.19)
где - радиус закругления дороги; - ускорение свободного падения; - скорость движения скрепера.
Коэффициент запаса устойчивости по сцеплению движителя при прохождении закругленных участков дорог определяется равенством (4.13).
Устойчивость прицепного скрепера к гусеничному тягачу. Этот тип машины обладает относительно малой транспортной скоростью и высокими сцепными качествами движителя. Прицепной агрегат обычно не оборудуется тормозами. Поэтому для таких машин рассчитывают продольную и боковую устойчивость по опрокидыванию и сползанию юзом, а также устанавливают преодолеваемый подъем по запасу мощности двигателя.
|
|
|

Рис. 4.6. Схема для определения продольной устойчивости
тягача к прицепному скреперу
Предельный угол подъема по условию опрокидывания тягача назад (рис. 4.6) находят из равенства:
 . (4.20)
. (4.20)
Здесь  - коэффициент сопротивления перекатыванию прицепа.
- коэффициент сопротивления перекатыванию прицепа.
Предельный угол подъема по сцеплению движителя вычисляютизсоотношения:
 . (4.21)
. (4.21)
где  ,
,  - коэффициенты сцепления и передвижения гусеничного тягача.
- коэффициенты сцепления и передвижения гусеничного тягача.
Предельный угол подъема, преодолеваемый по условию реализации максимального тягового усилия, определяют с помощью формулы:
 . (4.22)
. (4.22)
Здесь ;  . Предельный угол уклона по опрокидыванию вперед находят из выражения:
. Предельный угол уклона по опрокидыванию вперед находят из выражения:
 . (4.23)
. (4.23)
Предельный угол по сцеплению движителя вычисляют, используя равенство:
 . (4.24)
. (4.24)
Предельный поперечный угол по опрокидыванию и сползаниююзомтягача рассчитывается по соотношениям (4.10), (4.11). Предельный угол косогора для прицепа определяется зависимостью (4.14).
Полученные в результате расчета минимальные значения углов устойчивости вносят в техническую характеристику машины.
Автогрейдеры
Автогрейдер — длиннобазовая машина. Поэтому продольная его устойчивость к опрокидыванию гарантирована на уклонах, являющихся предельными по условию сцепления движителя с дорогой. Необходимо иметь в виду, что тормозами оборудуются обычно только задние колеса автогрейдера. В качестве ведущих используются все колеса либо только задние.

Рис. 4.7. Схема для определения устойчивости автогрейдера
Предельный угол подъема, преодолеваемый автогрейдером по условию сцепления движителя с дорогой, рассчитывается по равенству (4.6) для машин со всеми ведущими колесами и по соотношению (4.8) для машин с задними ведущими колесами (рис. 4.10). Наибольший угол подъема, преодолеваемый по условию реализации 100 %-ной мощности двигателя, устанавливают по соотношению (4.9). Предельный уклон по условию сцепления тормозных колес с дорогой находят из равенства (4.3). Поперечная устойчивость автогрейдера вычисляется с помощью равенств (4.10) — (4.13).
Данные расчетов устойчивости автогрейдеров вносят в техническую характеристику машины.
Одноковшовые экскаваторы
Устойчивость экскаватора, оборудованного прямой лопатой.
Этот показатель определяется для четырех случаев [7].
1. При отрыве препятствия (рис. 4.8), например в виде каменной глыбы, предполагается, что экскаватор установлен на горизонтальной поверхности, рабочее оборудование расположено поперек ходовых устройств, стрела наклонена к горизонту под углом 45°, зубья ковша находятся на уровне напорного вала, подъемные канаты вертикальны, ковш порожний, на режущей кромке ковша реализуется максимальное усилие, соответствующее  . Для машин с гидравлическим приводом усилие на зубьях ковша отвечает давлению срабатывания предохранительного клапана гидросистемы.
. Для машин с гидравлическим приводом усилие на зубьях ковша отвечает давлению срабатывания предохранительного клапана гидросистемы.

Рис. 4.8. Схема для определения устойчивости одноковшового
экскаватора, оборудованного прямой лопатой, в рабочем процессе
Описанному случаю соответствует возможное опрокидывание экскаватора относительно наружных граней опорных катков, пневматических шин либо выносных опор. Коэффициент запаса устойчивости:
 ,
,
где  ,
,  - моменты относительно ребра опрокидывания удерживающих и опрокидывающих сил; - сила тяжести ходовой тележки; - сила тяжести поворотной платформы с расположенными на ней устройствами;
- моменты относительно ребра опрокидывания удерживающих и опрокидывающих сил; - сила тяжести ходовой тележки; - сила тяжести поворотной платформы с расположенными на ней устройствами;  - сила тяжести противовеса;
- сила тяжести противовеса;  - максимальное вертикальное усилие на режущей кромке ковша, определяемое из условия равновесия рукояти;
- максимальное вертикальное усилие на режущей кромке ковша, определяемое из условия равновесия рукояти;  ,
,  ,
,  - силы тяжести ковша, рукояти и стрелы.
- силы тяжести ковша, рукояти и стрелы.
Соответствующие данному расчетному случаю плечи  ,
,  ,
,  даны на рис. 4.8. Коэффициент запаса устойчивости должен находиться в интервале 1,05…1,1.
даны на рис. 4.8. Коэффициент запаса устойчивости должен находиться в интервале 1,05…1,1.
2. При нормальной работе экскаватора (см. рис. 4.8) предполагается, что машина установлена на горизонтальной поверхности, рабочее оборудование расположено поперек ходовых устройств, стрела наклонена к горизонту под углом 45°, рукоять горизонтальна и максимально выдвинута, ковш заполнен грунтом, в подъемных канатах действует рабочее усилие, а напорное усилие, равное половине рабочего, перемещает ковш «на себя», что соответствует  , направленному к забою. У машин с гидравлическим приводом сначала вычисляют усилие
, направленному к забою. У машин с гидравлическим приводом сначала вычисляют усилие  , рассматривая поворот рукояти относительно стрелы под действием в цилиндрах поворота рукояти усилий, соответствующих номинальному давлению в гидросистеме. Значение усилия , направленного «от себя», при уже найденном значении также определяют исходя из реализации в стреловых гидроцилиндрах номинального давления масла.
, рассматривая поворот рукояти относительно стрелы под действием в цилиндрах поворота рукояти усилий, соответствующих номинальному давлению в гидросистеме. Значение усилия , направленного «от себя», при уже найденном значении также определяют исходя из реализации в стреловых гидроцилиндрах номинального давления масла.
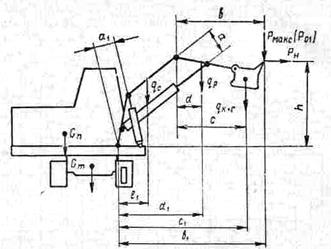
Рис. 4.9. Схема для определения устойчивости гидравлического
экскаватора
Как и в первом случае, опрокидывание экскаватора возможно относительно внешних граней опорных катков либо относительно пневматических шин или выносных опор. Удерживающий и опрокидывающий моменты рассчитывают согласносхеме (см. рис. 4.8);
 .
.
Входящие в последнее равенство значения ,  устанавливают из уравнений равновесия рукояти с ковшомотносительно оси напорного вала: для машины с канатным приводом:
устанавливают из уравнений равновесия рукояти с ковшомотносительно оси напорного вала: для машины с канатным приводом:
 ;
;  ,
,
для машины с гидравлическим приводом (рис. 5.20) р  ;
;  ,
,
где  ,
,  - усилия в цилиндрах поворота рукояти и стрелы.
- усилия в цилиндрах поворота рукояти и стрелы.
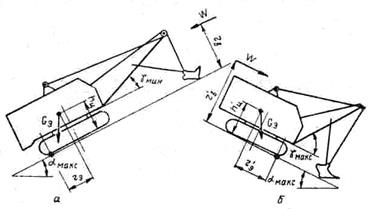
Рис. 4.10. Схемы для определения устойчивости одноковшового
экскаватора при движении на подъем (а) и под уклон (б)
Коэффициент запаса устойчивости должен находиться в интервале 1,05...1,1.
3. Экскаватор в транспортном режиме движется на подъем, стрела машины с канатно-блочным управлением наклонена к опорной поверхности под минимальным углом (около 30°), рукоять полностью выдвинута, ковш находится у земли (рис. 4.10, а). У экскаватора с гидравлическим приводом рабочее оборудование установлено в транспортное положение. Опрокидыванию способствует ветер. Расчет устойчивости ведется для максимально наклоненной опорной поверхности движения. Наибольший угол подъема (или уклона для случая 4) находится по условиям реализации наибольшего тягового усилия или сцепления движителя с дорогой:
 .
.
Здесь - коэффициент сцепления движителя с дорогой;  - предельный угол подъема (или уклона для случая 4), определяемый тяговым расчетом:
- предельный угол подъема (или уклона для случая 4), определяемый тяговым расчетом:
 ,
,
где - мощность силовой установки; - к.п.д. трансмиссии;  - сила тяжести всего экскаватора;
- сила тяжести всего экскаватора;  - минимальная скорость передвижения экскаватора;
- минимальная скорость передвижения экскаватора;  - коэффициент сопротивления движению.
- коэффициент сопротивления движению.
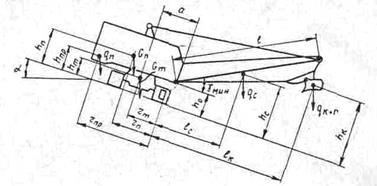
Рис. 4.11. Схема для определения устойчивости драглайна.
Потеря устойчивости экскаватора возможна относительно задних катков (колес). Коэффициент:
 .
.
Здесь  - расстояние между направлением составляющей
- расстояние между направлением составляющей  и осью опрокидывания с учетом выбранного положения рабочего оборудования; - высота центра тяжести экскаватора;
и осью опрокидывания с учетом выбранного положения рабочего оборудования; - высота центра тяжести экскаватора;  - коэффициент заполнения наветренной поверхности экскаватора,
- коэффициент заполнения наветренной поверхности экскаватора,  ;
;  - площадь наветренной поверхности экскаватора, ограниченная его контуром;
- площадь наветренной поверхности экскаватора, ограниченная его контуром;  - коэффициент аэродинамического сопротивления,
- коэффициент аэродинамического сопротивления,  ;
;  - расчетное давление ветра,
- расчетное давление ветра,  Па.
Па.
4. Экскаватор в транспортном режиме движется под уклон (рис. 4.10, б), стрела машины с канатно-блочным управлением наклонена к опорной поверхности под максимальным углом, рукоять висит вертикально. У экскаватора с гидроприводом рабочее оборудование закреплено в транспортном положении. Ветер с давлением 250 Па направлен против движения. Вычисляя наибольший угол уклона, пользуются соответствующими формулами для расчетного случая 3. Опрокидывание возможно относительно точки контакта с опорной поверхностью направляющих колес. Коэффициент:
 .
.
Обозначения входящих в последнюю формулу величин те же, что и ранее. Значения  ,
,  ,
,  ,
,  следует принимать с учетом иных положений ковша и точки опрокидывания.
следует принимать с учетом иных положений ковша и точки опрокидывания.
Устойчивость экскаватора-драглайна.
Проверка осуществляется при работе на наклоненной к горизонту опорной площадке под углом  ° (рис. 4.11). Рабочее оборудование расположено поперек ходовых устройств, заполненный грунтом ковш находится на максимальном вылете, стрела наклонена к опорной поверхности под углом 25... 30°. Опрокидывание возможно относительно боковых граней опорных катков. Коэффициент устойчивости рассчитывается по соотношению:
° (рис. 4.11). Рабочее оборудование расположено поперек ходовых устройств, заполненный грунтом ковш находится на максимальном вылете, стрела наклонена к опорной поверхности под углом 25... 30°. Опрокидывание возможно относительно боковых граней опорных катков. Коэффициент устойчивости рассчитывается по соотношению:

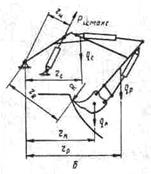
Рис. 4.12. Схема для определения устойчивости экскаватора,
оборудованного обратной лопатой, при расчетном
положении 1 (а — канатно-блочное управление; б — гидропривод)
 .
.
Удерживающий момент:
 .
.
Опрокидывающий момент находится с учетом действия центробежных сил:

 ,
,
где  - максимальная угловая скорость вращения поворотной платформы.
- максимальная угловая скорость вращения поворотной платформы.
Устойчивость экскаватора, оборудованного обратной лопатой.
Расчет производится для двух положений: 1. Машина расположенанагоризонтальной площадке, осуществляется отрыв ковша от грунта у бровки забоя под действием максимальных усилий, создаваемых стрелоподъемным механизмом (рис. 4.12). 2. Экскаватор находитсянаповерхности, наклоненной к горизонту под углом 12°; производится выгрузка вязкого грунта на максимальном вылете ковша (рис. 4.13).

Рис. 4.13. Схема для определения устойчивости экскаватора,
оборудованного обратной лопатой, при расчетном положении 2
Для положения 1 направление реакции грунтана зубьях ковша перпендикулярно к линии, соединяющей центр поворота стрелы и режущую кромкуковша. У машины с канатно-блочным управлением:
 ,
,
если используется гидропривод:
 .
.
Здесь - максимальное усилие в стрелоподъемном полисы пасте;  - усилие, развиваемое стрелоподъемными цилиндрами при предельном давлении в гидросистеме.
- усилие, развиваемое стрелоподъемными цилиндрами при предельном давлении в гидросистеме.
Коэффициент запаса устойчивости для положения 1:
 ,
,
для положения 2:
 .
.
Многоковшовые траншейные экскаваторы
Устойчивость роторного траншейного экскаватора рассчитывается для транспортного и рабочих положений. В транспортном положении в зависимости от способа навески ротора расчет устойчивости ведется по соотношениям (4.1), (4.4) - (4.6), (4.9) - (4.11) для машин с навесным ротором и (4.15)—(4.18) для экскаваторов с дополнительной опорой.

Рис. 4.14. Схема для определения устойчивости роторного
траншейного экскаватора
В рабочем процессе опрокидывание тягача возможно относительно задних опор при технологическом стопорении ротора, когда движитель развивает силу тяги, ограниченную сцеплением (рис. 4.14):
 ,
,
где ,  - силы тяжести тягача и противовеса;
- силы тяжести тягача и противовеса;  - реакция навесного оборудования на тягач;
- реакция навесного оборудования на тягач;  - наибольшая сила тяги. Входящие в эту формулу величины вычисляют с помощью следующих соотношений:
- наибольшая сила тяги. Входящие в эту формулу величины вычисляют с помощью следующих соотношений:
 ,
,
 .
.
Здесь  - сила тяжести рабочего оборудования;
- сила тяжести рабочего оборудования;  - диаметр ротора; - коэффициент сцепления движителя с опорной поверхностью,
- диаметр ротора; - коэффициент сцепления движителя с опорной поверхностью,  ;
;  - момент, передаваемый муфтой предельного момента;
- момент, передаваемый муфтой предельного момента;  - передаточное число между ротором и муфтой предельного момента.
- передаточное число между ротором и муфтой предельного момента.
Опрокидывание цепных траншеекопателей во время работы невозможно из-за жесткой навески рабочего оборудования. Для транспортного режима расчет ведется по соотношениям (4.1), (4.4) - (4.6), (4.9)-(4.11).
Погрузчики
Устойчивость погрузчиков в транспортном режиме при порожнем ковше определяется теми же соотношениями, что и для бульдозера:
(4.1) — (4.13). Во время рабочего процесса погрузчик перемещается на почти горизонтальных площадках, допустимый уклон которых не должен превышать 3° (СНиП 111А — 11—70). Расчет продольной устойчивости погрузчиков ведется из условия опрокидывания вперед (рис. 4.15) с учетом того, что деформируются опорные поверхности под гусеничным ходом либо пневматические шины, если ход пневмоколесный [4].

Рис. 4.15. Схема для определения устойчивости погрузчика
Угол дополнительного наклона погрузчика впередвследствие деформации опор определяется соотношением:
 ,
,
где - сила тяжести погрузчика;  ,
,  - жесткость грунта под передним и задним катками гусеничного хода либо радиальная жесткость передних и задних пневматических шин погрузчика на пневмоколесном ходу;
- жесткость грунта под передним и задним катками гусеничного хода либо радиальная жесткость передних и задних пневматических шин погрузчика на пневмоколесном ходу;  - база погрузчика;
- база погрузчика;  - расстояние между центром тяжести погрузчика и вертикальной осью, проходящей через точку опрокидывания.
- расстояние между центром тяжести погрузчика и вертикальной осью, проходящей через точку опрокидывания.
Обычно наибольшее значение  не превышает 1,5°. Поэтому при расчете продольной устойчивости гусеничного и пневмоколесного погрузчиков:
не превышает 1,5°. Поэтому при расчете продольной устойчивости гусеничного и пневмоколесного погрузчиков:
 .
.
Здесь  - уклон погрузочной площадки; - дополнительный наклон погрузчика вследствие деформации опор.
- уклон погрузочной площадки; - дополнительный наклон погрузчика вследствие деформации опор.
Наименьшим запасом продольной устойчивости обладает погрузчик в случае движения под уклон с одновременным торможениеммашины и рабочего оборудования при его опускании. Положение рабочего оборудования при этом соответствует максимальному вылету (см. рис. 4.15). Тогда:
 ,
,
где - сила тяжести тягача с противовесом и неподвижными частями навесного оборудования погрузчика;  - сила тяжести груза;
- сила тяжести груза;  - сила тяжести подвижных частей рабочего оборудования (ковш, стрела, тяги, рычаги, гидроцилиндры); ,
- сила тяжести подвижных частей рабочего оборудования (ковш, стрела, тяги, рычаги, гидроцилиндры); ,  ,
,  , ,
, ,  ,
,  - плечи соответствующих усилий (см. рис. 4.15);
- плечи соответствующих усилий (см. рис. 4.15);  - момент сил инерции относительно ребра опрокидывания;
- момент сил инерции относительно ребра опрокидывания;  - момент, вызванный ветровой нагрузкой:
- момент, вызванный ветровой нагрузкой:
 .
.
Здесь - коэффициент заполнения контура наветренной площади погрузчика,  ; - наветренная площадь погрузчика, ограниченная его контуром; - коэффициент аэродинамических сопротивлений, ;
; - наветренная площадь погрузчика, ограниченная его контуром; - коэффициент аэродинамических сопротивлений, ;  - расчетное давление ветра, принимаемое по ГОСТ 1451-77;
- расчетное давление ветра, принимаемое по ГОСТ 1451-77;  - плечо приложения ветровой нагрузки.
- плечо приложения ветровой нагрузки.
Момент сил инерции находится по соотношению:
 ,
,
где  - тормозной момент остановочных тормозов; , - передаточное число и к.п.д. части трансмиссии между тормозом и ведущим колесом;
- тормозной момент остановочных тормозов; , - передаточное число и к.п.д. части трансмиссии между тормозом и ведущим колесом;  - общая масса погрузчика с рабочим оборудованием и грузом,
- общая масса погрузчика с рабочим оборудованием и грузом,  ;
;  - радиус ведущего колеса; - коэффициент сопротивления движению;
- радиус ведущего колеса; - коэффициент сопротивления движению;  ,
,  ,
,  - массы груза, подвижных частей рабочего оборудования и тягача; - скорость опускания груза;
- массы груза, подвижных частей рабочего оборудования и тягача; - скорость опускания груза;  - время торможения стрелы,
- время торможения стрелы,  с.
с.
Приложение
Таблица 1. Техническая характеристика гусеничных тракторов
| Марка трактора | ДЭТ-250М | Т-180Г | Т-130БГ-1 | Т-100МЗ | Т-100МЗБ |
| Тяговый класс Габаритны размеры, мм: длина ширина высота Масса трактора, кг: конструктивная эксплуатационная Продольная база, мм Дорожный просвет, мм Ширина гусеницы, мм Координаты центра тяжести, мм: от продольной оси (вправо) от оси ведущих звёздочек (вперёд) Марка двигателя Частота вращения, с-1 Мощность, кВт Оптовая цена, руб | В-ЗОВ | Д-130 | Д-1606 | Д-108 | Д-108-2 |
Продолжение таб
|
|
|
