 |


Экспериментальные данные при снятии механической характеристики n=f(М)
|
|
|
|
Экспериментальные данные при снятии механической характеристики n=f(М)
двигателя постоянного тока параллельного возбуждения
(Iв дв=250 мA =const, Iв г=250 мA, U=200 B =const)
| № п/п | Iа, мA | n, об/мин | Uг, В | Iг, A |
| 1 (хол. ход). | ||||
| 2. | ||||
| 3. | ||||
| 4. |
Таблица 4. 7
Экспериментальные данные при снятии механической характеристики n=f(М)
двигателя постоянного тока параллельного возбуждения
(Iв дв=210 мA =const, Iв г=250 мA, U=200 B =const)
| № п/п | Iа, мA | n, об/мин | Uг, В | Iг, A |
| 1 (хол. ход). | ||||
| 2. | ||||
| 3. | ||||
| 4. |
Таблица 4. 8
Экспериментальные данные при снятии механической характеристики n=f(М)
двигателя постоянного тока параллельного возбуждения
(Iв дв=170 мA =const, Iв г=250 мA, U=200 B =const)
| № п/п | Iа, мA | n, об/мин | Uг, В | Iг, A |
| 1 (хол. ход). | ||||
| 2. | ||||
| 3. | ||||
| 4. |
8. Используя экспериментальные данные табл. 4. 6, 4. 7, 4. 8, построить семейство механических характеристик n=f(M) для различных значений напряжения тока возбуждения Iв дв. Необходимые расчеты провести аналогично п. 6.
9. Проанализировать характеристики, построенные по п. п. 3…8, и сделать выводы по лабораторной работе.
Контрольные вопросы:
1. Поясните устройство и принцип работы двигателя постоянного тока.
2. Приведите классификацию двигателей постоянного тока по способу возбуждения.
3. Какую роль выполняет щеточно-коллекторный узел в двигателе постоянного тока?
|
|
|
4. Напишите выражения для ЭДС якоря и электромагнитного момента двигателя постоянного тока.
5. Напишите уравнение электрического равновесия цепи якоря двигателя.
6. Составьте уравнение баланса мощностей двигателя постоянного тока с параллельным возбуждением.
7. Какие физические величины определяют электромагнитный момент двигателя постоянного тока?
8. Как рассчитать мощность и ток, потребляемые двигателем постоянного тока параллельного возбуждения от источника питания?
9. В чем состоит свойство саморегулирования момента двигателя постоянного тока?
10. Объясните, как изменяется ток якоря двигателя постоянного тока параллельного возбуждения при изменении момента сопротивления на валу.
11. Почему двигатели постоянного тока имеют большой пусковой ток и как его можно ограничить? Опишите способы пуска.
12. Как рассчитать пусковой ток двигателя?
13. Что называется механической характеристикой двигателя? Каким условиям снятия соответствует естественная характеристика?
14. Напишите аналитическое выражение уравнения механической характеристики.
15. Какими способами можно регулировать частоту вращения двигателей постоянного тока параллельного возбуждения? Изобразите соответствующие регулировочные характеристики.
16. Опишите методику снятия механических характеристик двигателя постоянного тока.
17. Как изменить направление вращения двигателя постоянного тока параллельного возбуждения?
ЛАБОРАТОРНАЯ РАБОТА № 5
 |
ИССЛЕДОВАНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ
С КОРОТКОЗАМКНУТЫМ РОТОРОМ
 |
Цель работы
1. Ознакомиться с устройством и принципом действия асинхронного двигателя с короткозамкнутым ротором.
2. Изучить способы пуска двигателя с короткозамкнутым ротором.
3. Снять и исследовать рабочие характеристики асинхронного двигателя.
|
|
|
Основные теоретические положения
Асинхронные двигатели являются наиболее распространенными, особенно в нерегулируемых электроприводах небольшой мощности. Они просты по устройству, дешевы, надежны в эксплуатации, экономичны и удобны в обслуживании.
Асинхронный двигатель состоит из неподвижного статора 1 и расположенного соосно внутри вращающегося ротора 2 (рис. 5. 1). Между внутренней поверхностью статора и наружной поверхностью ротора имеется воздушный зазор.
 |
|
|
|
|
|
|

Рис. 5. 1. Устройство асинхронного двигателя
Корпус (станина) статора 3 выполняется из чугуна, стали или алюминиевого сплава. Внутри него укрепляется сердечник статора, а по торцам – подшипниковые щиты 4, 5, несущие ротор. В двигателях закрытого исполнения корпус оребрен и обдувается с помощью вентилятора 7 и кожуха 8.
Сердечники статора и ротора выполняют из штампованных листов электротехнической стали толщиной 0, 5 мм, изолированных друг от друга с целью уменьшения вихревых токов и связанных с ними потерь.
Сердечник статора имеет форму полого цилиндра с пазами на внутренней поверхности, в которые укладывается трехфазная обмотка статора. Выводы обмотки размещают в коробке выводов 6. Начала фазных обмоток статора обозначаются U1, V1, W1, а концы – U2, V2, W2. На двигателях старых серий использовалась другая маркировка выводов: начала – С1, С2, С3, концы – С4, С5, С6.
Фазы обмотки статора могут соединяться в звезду (Y) или треугольник (D). На табличке двигателя указывается способ соединения фазных обмоток в зависимости от линейного напряжения Uном источника питания, например, «Y/Δ » и «380/220 В». Это означает, что при Uном=380 В трехфазная обмотка статора двигателя должна соединяться по схеме «звезда», а при Uном=220 В – по схеме «треугольник». При обеих схемах соединения фазное напряжение обмотки одинаково: Uф=220 В.
Асинхронные двигатели изготавливаются с короткозамкнутым и фазным ротором. Название соответствует типу обмотки, которая располагается в пазах на наружной поверхности сердечника ротора.
Короткозамкнутая обмотка напоминает «беличью клетку» и состоит из ряда медных или алюминиевых стержней, соединенных по торцам короткозамыкающими кольцами (рис. 5. 1).
|
|
|
Обмотка фазного ротора в целом аналогична обмотке статора и обычно соединяется в звезду. Концы обмотки присоединены к расположенным на валу трем контактным кольцам, которые изолируются друг от друга и от вала ротора. К контактным кольцам прилегают щетки. С помощью этого узла к цепи фазного ротора могут подключаться различные внешние устройства, например, пусковой реостат. Изменением величины сопротивления реостата при пуске двигателя можно оптимизировать этот процесс: увеличить пусковой момент, уменьшить пусковой ток и др.
Образование вращающегося магнитного поля с помощью трехфазной обмотки. В асинхронном двигателе обмотка статора возбуждает первичное круговое вращающееся магнитное поле. Для его создания необходимо выполнение следующих условий:
1. Обмотка должна состоять из трех частей (фаз).
2. Магнитные оси фаз должны быть повернуты относительно друг друга по окружности зазора на 120 электрических градусов («электрическими» в теории асинхронных и синхронных машин называют угловые единицы, отсчитываемые в долях периода магнитного поля: 1 период равен 360 электрических градусов).
3. Фазы обмотки должны быть запитаны симметричным трехфазным током.
Периодическое пространственное распространение колебаний какой-либо физической величины обычно называют волновым. Если пространственное положение максимумов колебательного процесса остается неизменным, волна называется пульсирующей (стоячей). Таковыми в асинхронном двигателе являются волны индукции магнитного поля отдельных фаз. Наложение этих полей при выполнении условий (1…3) приводит к возникновению в зазоре между статором и ротором так называемой, круговой вращающейся волны магнитной индукции, которая описывается выражением:
B(t, a)=Bu+Bv+Bw=1, 5Bmcos(w1t-pa),
где w1=2pf1 – угловая частота тока обмотки, p – число пар полюсов магнитного поля.
Предположим, что вместе с волной с равной скоростью движется некоторая материальная точка. В месте нахождения этой точки фаза волнового процесса будет оставаться неизменной: w1t-pa=const. Производная по времени от угловой координаты этой точки называется угловой частотой вращения волны, W1 [рад/с]: W1=da/dt=w1/p. Она связана с частотой вращения n1 (в оборотах в секунду) известным соотношением:
|
|
|
W1=2pn1. (5. 1)
Частота вращения n1 волны поля называется «синхронной». Она прямо пропорциональна частоте тока в обмотке и обратно пропорциональна числу пар полюсов:
n1=f1/p.
Для промышленной частоты f=50 Гц частота вращения поля при небольших числах полюсов представлена в табл. 5. 1.
Таблица 5. 1
Значения синхронной частоты вращения при числах полюсов 2p£ 8.
| 2р | ||||
| n1, об/мин |
Принцип действия асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с токами, которые наводятся этим полем в проводниках обмотки ротора.

Рис. 5. 2. Принцип действия асинхронного двигателя
При подключении трехфазного асинхронного двигателя к сети под действием приложенного напряжения по обмотке статора протекает трехфазный ток, создающий вращающееся вокруг ротора магнитное поле. При пересечении линиями этого поля проводников обмотки ротора индуцируется ЭДС e2s, которая вызывает в замкнутой обмотке ротора ток (рис. 5. 2). Обмотка ротора обладает активным сопротивлением r2, и поэтому ток в ней всегда имеет совпадающую по фазе с индуктируемой ЭДС активную составляющую i2а. Направление ЭДС и тока можно определить по известному «правилу правой руки».
На проводники обмотки ротора, по которым протекает активная составляющая тока i2а, со стороны магнитного поля действуют электромагнитные силы Fэм, направленные в сторону вращения поля (направление действия сил можно определить, используя известное «правило левой руки»). Они создают вращающий электромагнитный момент Мэм, под действием которого ротор начинает разворачиваться в сторону вращения поля и ускоряется до тех пор, пока вращающий момент не станет равным моменту сопротивления на валу двигателя: Мэм=Мсопр.
В установившемся двигательном режиме частота вращения ротора всегда меньше частоты вращения поля (n2< n1), из-за чего двигатель называют «асинхронным».
Разность частот вращения поля и ротора называется частотой скольжения:
ns=n1–n2.
Значение ns выраженное в относительных единицах, называют скольжением:
s=ns/n1=(n1–n2)/n1. (5. 2)
|
|
|
Частота вращения ротора, выраженная через скольжение из уравнения (5. 2), может быть рассчитана по формуле
n2=n1(1–s). (5. 3)
Так как наведение ЭДС в обмотке ротора обусловлено относительной частотой вращения поля и ротора, величина этой ЭДС, а также ее частота прямо пропорциональны скольжению: E2s=E2s, f2=f1s (E2 – величина ЭДС при неподвижном роторе).
В соответствии с принципом действия асинхронного двигателя в установившемся режиме большему вращающему моменту на валу должно соответствовать большее скольжение, так как это приводит к возрастанию силы тока в роторе вследствие увеличения индуктируемой ЭДС.
Зависимость Мэм=f(s) – электромагнитного момента двигателя от скольжения, называется механической характеристикой. В графическом виде эта зависимость изображена на рис. 5. 3.

Рис. 5. 3. Механическая характеристика асинхронного двигателя
В установившемся режиме двигатель может работать в диапазоне скольжений 0< s< sк. Скольжение, при котором развивается номинальный момент Мн, обычно не превышает нескольких процентов (sн=0, 02…0, 09).
При скольжении sк, называемым критическим, двигатель развивает максимальный вращающий момент Мmax, который определяет перегрузочную способность двигателя. При подаче на обмотку статора напряжения питающей сети, когда ротор неподвижен (s=1), асинхронный двигатель развивает начальный пусковой момент Мпус.
Точки механической характеристики, соответствующие номинальному, максимальному и пусковому моментам, являются важными эксплуатационными параметрами и могут быть определены по паспортным данным. Величину номинального момента можно рассчитать по номинальным значениям мощности на валу P2 [Вт] и частоты вращения n2 [об/мин]:
 . (5. 4)
. (5. 4)
Максимальный и пусковой моменты задаются в относительных величинах: кратность максимального момента mк=Мmax/Мн (mк=2, 2…3), кратность пускового момента mп=Мпус/Мн (mп=1, 2…2, 2).
При работе асинхронной машины в режиме двигателя 0< n2< n1 (0< s< 1) и электромагнитный момент Мэм является вращающим. Если в подключенном к питающей сети асинхронном двигателе с помощью постороннего первичного двигателя привести ротор во вращение с частотой n2> n1 (s< 0), то он будет работать в генераторном режиме, отдавая энергию в сеть. При этом на ротор действует тормозной электромагнитный момент, который компенсируется вращающим моментом первичного двигателя.
Если ротор асинхронного двигателя с помощью постороннего двигателя вращать в сторону, противоположную вращению поля, т. е. n2< 0 (s> 1), то асинхронная машина будет работать в режиме электромагнитного тормоза. При этом электрическая энергия, потребляемая из сети, и механическая энергия первичного двигателя расходуются на нагрев асинхронного двигателя.
Пуск асинхронных двигателей с короткозамкнутым ротором малой и средней мощности чаще всего производится методом прямого подключения к питающей сети. При таком способе пусковые токи в 5…7 раз превышают номинальное значение. Они могут вызвать недопустимое снижение напряжения в сети, что отрицательно влияет на работу других электроприемников, получающих питание от этой же сети.
Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором применяют различные способы: на период пуска с помощью автотрансформатора снижают подводимое напряжение, подключают двигатель к сети через реактор, переключают соединение фазных обмоток статора с треугольника на звезду (такое переключение возможно только у двигателей, нормально работающих при соединении фаз треугольником). При этом пусковой ток, а также пусковой момент снижаются в три раза.
Изменение направления вращения (реверс) асинхронных двигателей выполняют путем изменения направления вращения поля. Для этого переключают на обратное чередование фаз напряжения, подводимого к двигателю (меняют местами подключение к выводам обмотки статора любых двух питающих фаз из трех).
Рабочие характеристики асинхронного двигателя (рис. 5. 4) дают наиболее полное представление об его эксплуатационных свойствах. Они представляют зависимость частоты вращения ротора (n2), скольжения (s), коэффициента мощности (cosφ ), КПД (η ), потребляемого из сети тока (I1) и вращающего момента (М2) от мощности P2 на валу двигателя. Характеристики снимаются при номинальном питающем напряжении U1н и частоте f1н. На рис. 5. 4 зависимости величин, имеющих размерность, приведены в относительных единицах (помечены «*»).
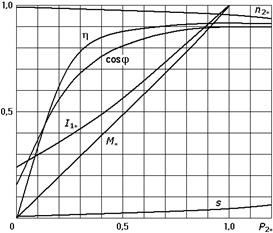
Рис. 5. 4. Рабочие характеристики асинхронного двигателя с короткозамкнутым ротором
При увеличении нагрузки скольжение s растет, а частота вращения n2 в соответствии с выражением (5. 3) снижается. Однако эти изменения незначительны (sн=3…7%), и поэтому характеристика n2=f(P2) короткозамкнутого асинхронного двигателя является достаточно жесткой.
Зависимость от нагрузки потребляемого из сети тока I1=f(P2) аналогична соответствующей зависимости для полной мощности S1, так как  , где S1, P1 и Q1 – полная, активная и реактивная мощности двигателя, U1 – линейное напряжение на выводах. При холостом ходе двигатель потребляет значительный ток I0*=0, 2…0, 4, на порядок превышающий соответствующее значение для трансформатора. Это обусловлено наличием воздушного зазора в магнитной цепи двигателя. С ростом мощности нагрузки потребляемый ток
, где S1, P1 и Q1 – полная, активная и реактивная мощности двигателя, U1 – линейное напряжение на выводах. При холостом ходе двигатель потребляет значительный ток I0*=0, 2…0, 4, на порядок превышающий соответствующее значение для трансформатора. Это обусловлено наличием воздушного зазора в магнитной цепи двигателя. С ростом мощности нагрузки потребляемый ток  возрастает из-за увеличения активной составляющей тока I1a.
возрастает из-за увеличения активной составляющей тока I1a.
Характер зависимости cosj=f(P2) связан с изменением соотношения между активной и полной мощностью с ростом нагрузки, так как  . В режиме холостого хода низкое значение коэффициента мощности (cosj0=0, 15…0, 20), обусловлено тем, что Q0> > P0. С ростом мощности P2 растет потребляемая мощность Р1=Р2+DP (DP – суммарные потери мощности) и cosj1 увеличивается, достигая максимального значения при нагрузке, близкой к номинальной (Р2*=0, 9…1, 0). При дальнейшем увеличении нагрузки полная мощность растет быстрее активной из-за пропорциональной квадрату тока части реактивной мощности, обусловленной магнитным полем рассеяния, и cosj уменьшается.
. В режиме холостого хода низкое значение коэффициента мощности (cosj0=0, 15…0, 20), обусловлено тем, что Q0> > P0. С ростом мощности P2 растет потребляемая мощность Р1=Р2+DP (DP – суммарные потери мощности) и cosj1 увеличивается, достигая максимального значения при нагрузке, близкой к номинальной (Р2*=0, 9…1, 0). При дальнейшем увеличении нагрузки полная мощность растет быстрее активной из-за пропорциональной квадрату тока части реактивной мощности, обусловленной магнитным полем рассеяния, и cosj уменьшается.
Характер зависимости η =f(P2) связан с изменением при нагрузке соотношения между полезной и потребляемой из сети активной мощностью (η =P2/P1). Для объяснения сложного характера этой зависимости необходимо проанализировать структуру потерь в двигателе. Суммарные потери мощности разделяют на постоянные DPпост и переменные DPпер: DP=DPпост+DPпер. К постоянным относят магнитные и механические потери, мало зависящие от нагрузки, к переменным – электрические потери в обмотках, пропорциональные квадрату тока.
В режиме холостого хода η =0, так как P2=0. В области относительно небольших нагрузок полезная мощность растет быстрее потребляемой и КПД возрастает, достигая максимального значения при DPпост=DPпер. Асинхронные двигатели проектируют таким образом, чтобы это соответствовало наиболее вероятной нагрузке при эксплуатации (Р2*=0, 75…0, 9). При дальнейшем увеличении P2 потребляемая мощность P1 растет быстрее из-за квадратично возрастающих электрических потерь в обмотках, и КПД двигателя снижается.
Величина КПД при номинальной нагрузке зависит от мощности и частоты вращения асинхронных двигателей и находится в диапазоне: при малой мощности (сотни ватт) – 0, 55…0, 75; средней мощности (киловатты – десятки киловатт) 0, 75…0, 93; большой мощности (сотни киловатт) – 0, 93…0, 95.
Зависимость вращающего момента М от мощности на валу двигателя P2 можно объяснить, исходя из связывающего эти величины выражения (5. 4). Если бы частота вращения при нагрузке оставалась постоянной, то характеристика М=f(P2) являлась бы прямо пропорциональной зависимостью. Но так как n2 с ростом нагрузкинезначительно снижается, вращающий момент М на валу растет несколько быстрее мощности P2.
|
|
|
