 |


Оценка расположения органов управления станка относительно оптимальных зон досягаемости
|
|
|
|
Оптимальная рабочая поза оператора-станочника обусловлена рядом особенностей трудового процесса. Краткая характеристика возможных рабочих положений приведена в табл.1 [3]..На рис.2 указаны параметры рабочих зон, соответствующие среднему росту мужчины 1680 мм с массой тела 68 кг.
| Предпочтительное положение | Прикладываемое усилие, кгс | Подвижность во. время работы ; | Величина (радиус) рабочей зоны |
| Стоя | 10...20 | большая | 750 мм и более |
| Переменная | 5...10 | средняя | 380...500 |
| Сидя | до 5 | ограниченная | 380...500 |
Кроме требований к размещению органов управления, изложенных в ГОСТ 22269-76, существуют следующие эргономические требования, предъявляемые к органам управления с целью конструирования и компоновки их на рабочем месте, обеспечивающие удобство пользования ими и способствующие увеличению надежности, точности и скорости работы:
• при использовании в процессе одной операции нескольких органов управления они должны располагаться последовательно слева направо и сверху вниз и соответствовать расположению связанных с ними индикаторов;
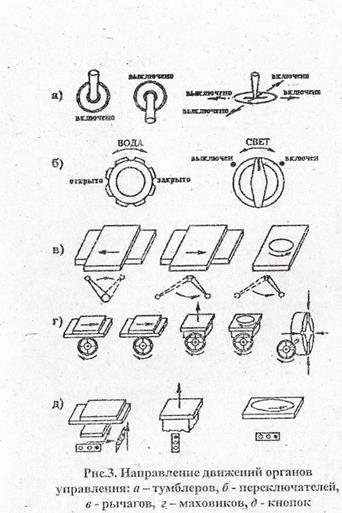
• органы управления должны перемещаться в том же направлении, в котором осуществляется рабочее движение (рис.3);
• для аварийных органов управления необходима возможность не только зрительного, но и тактильного (осязательного) опознания;

• при условии работы вслепую (например, фрезеровщик одновременно вращает два маховика для перемещения стола в горизонтальной плоскости) органы управления должны кодироваться формой или отстоять на расстоянии не менее 120 мм от соседних органов управления;
•  для предупреждения аварийных ситуаций из-за случайного несвоевременного включения или перемещения органа управления необходимо
для предупреждения аварийных ситуаций из-за случайного несвоевременного включения или перемещения органа управления необходимо
|
|
|
- Располагать органы управления так,чтобы оператор не мог случайно их задеть или передвинуть;
- обеспечить органы управления надежной блокировкой или замками для предотвращения перехода их в запретное состояние;
- предусмотреть в органах управления механическое сопротивление.
Оценка расположения органов управления металлорежущего станка относительно оптимальных зон досягаемости производится на стадии эскизного проектирования. Анализу подвергается станок-прототип (аналог), принятый в качестве базового при разработке конструкции нового станка.
В масштабе 1:10 (1:5, 1:20, 1:3'0 и других, достаточных для анализа) вычерчиваются только органы управления базового станка в ортогональных проекциях. При этом на чертеж тонкими линиями наносится контур станка, необходимый для определения точной дислокации станочника-оператора (наладчика, механика, электрика и др.) во время выполнения им производственной функции, связанной с данным станком (рис.4).
В табл.2 заносятся наименования всех органов управления, изображенных на рис.4.
Таблица 2
| Наименование и назначение органа управления | Размещение органа управления (ВЗ - вне зоны) | Соответствует (+) или нет (-) частота использования органа его местоположению | Соответствует (+) или нет'(-) направление движения органа управления движению узла станка | Поза оператора удобна (+) или неудобна (-) |
| 1 | 2 | 3 | 4 | 5 |
| 1. Пульт управления | В (Б) | - | + | - |
| 2. Переключение скоростей вертикального шпинделя | ВЗ | _ | + | _ |
| 3. Перемещение. гильзы вертикального шпинделя | ВЗ | _ | + | _ |
| 4. Зажим гильзы вертикального шпинделя | ВЗ | _ | + | _ |
| 5. Зажим гильз наклонных шпиндельных бабок | ВЗ | _ | + | _ |
| 6. Рукоятки переключения подач | ВЗ | _ | + | _ |
| 7. Кулачки настройки цикла работы стола | В | + | + | + |
Определяется маршрут перемещения оператора (наладчика) при
осуществлении им управляющих функций. Для этого изображаются полония
поз работника в узловых точках каждого акта осуществления им управляющих функций с графическим изображением сагиттальных (вертикальных) плоскостей (рис.5, вид сверху). На проекциях органов управления (см. рис.4) в соответствии с местоположением узловых точек управления выполняются изображения контуров зон досягаемости, соответствующие ГОСТ 12.2.033-78.В табл.2 сводятся результаты визуально-графического (соматографического) анализа расположения органов управления станка.
|
|
|

Список литературы.
1. Эргономика: человекоориентированное проектирование техники, программных средств и среды: учеб. для вузов / В.М.Мунипов, В.П.Зинченко. - М.: Логос, 2001.
2. Денисенко, А.В. Основы художественного конструирования: Инструктивно-методические указания к контрольным работам и программа курса / А.В.Денисенко, А.В.Шаповал, И.В.Рукосуев / ГПИ. Горький, 1981.
3. Денисенко, А.В. Альбом рисунков инструктивно-методических указаний к контрольным работам по курсу «Основы художественного конструирования» для студентов-заочников спец. 0501 / А.В.Денисенко, А.В.Шаповал И.В.Рукосуев/ГПИ. Горький, 1981.
4. Эргономика: принципы и рекомендации: Метод, руководство. - М.: ВНИИТЭ, 1983-
|
|
|
