 |


Испытания автомобиля на плавность хода
|
|
|
|
Реферат
На тему: «Критерии плавности хода автомобиля»
По курсу: «Динамика автомобиля»
Выполнил: студент группы 8-73-3
Зарипова Д.Ф.
Проверил: д-р техн. наук, проф.
Полищук Д.Ф.
Ижевск 2013.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ................................................................................................................................... 3
1. КРИТЕРИИ ПЛАВНОСТИ ХОДА..................................................................................... 4
2. ИСПЫТАНИЯ АВТОМОБИЛЯ НА ПЛАВНОСТЬ ХОДА............................................. 8
3. ПОДПРЫГИВАНИЕ И ГАЛОПИРОВАНИЕ................................................................. 12
4. ХАРАКТЕРИСТИКИ КОЛЕБАНИЙ В ЗАВИСИМОСТИ ОТ СКОРОСТИ............... 13
ЗАКЛЮЧЕНИЕ........................................................................................................................... 18
СПИСОК ЛИТЕРАТУРЫ.......................................................................................................... 19
ВВЕДЕНИЕ
Плавность хода — это совокупность потенциальных свойств автомобиля, характеризующих его способность двигаться в заданном интервале скоростей без превышения установленных норм вибронагруженности водителя, пассажиров, грузов и конструктивных элементов автомобиля.
Нормы вибронагруженности устанавливаются такими, чтобы на дорогах, для которых предназначен автомобиль, колебания водителя и пассажиров не вызывали у них неприятных ощущений и быстрой утомляемости, а колебания грузов и конструктивных элементов автомобиля не приводили к их повреждениям.
Возникающие при движении автомобиля колебания, вызванные неровностями дороги, оказывают влияние не только на плавность хода, но и на ряд других эксплуатационных свойств. Так, при эксплуатации грузовых автомобилей на дорогах с неудовлетворительным состоянием поверхности средняя скорость движения уменьшается на 40-50 %, межремонтный пробег — на86-40, расход топлива увеличивается на 50-70, а себестоимость перевозок —на 50-60 %.
|
|
|
Колебания масс автомобиля обусловлены неровностями опорной поверхности дороги. Интенсивность колебаний зависит от параметров и характеристик компоновки автомобиля, его подвески и шин, а также от характеристики воздействий дороги, определяемой геометрией неровностей и скоростью движения автомобиля. Параметры автомобиля, его механизмов и систем определяются в процессе функционального проектирования и зависят от его назначения. Вначале определяются основные параметры автомобиля исходя из требований обеспечения высоких тягово-скоростных свойств и топливной экономичности. Показатели этих свойств характеризуют потенциальные возможности автомобиля по эффективному выполнению функционального назначения. Производительность автомобиля непосредственно связана со скоростью его движения в реальных дорожных условиях. Однако потенциальные скоростные свойства автомобиля могут ограничиваться необходимостью обеспечения виброзащиты водителя, пассажиров и груза. Поэтому для достижения высокой эффективности выполнения транспортных работ автомобиль должен обладать возможностью длительного движения по дорогам с неровной поверхностью в интервале высоких эксплуатационных скоростей. Это свойство обеспечивается выбором рациональной структуры и оптимальных параметров подвески автомобиля. В качестве исходных данных при функциональном проектировании подвески принимаются параметры компоновки автомобиля, характеристики дорожных условий и технические требования на показатели оценки плавности хода, устанавливаемые на основе действующих нормативных документов.
КРИТЕРИИ ПЛАВНОСТИ ХОДА
В общем случае единый критерий плавности хода для грузового автомобиля можно задавать в виде суммы средних квадратов преобразований обобщенных координат подрессоренных масс автомобиля в виде:
|
|
|
 (1.1)
(1.1)
где  – оператор линейных преобразований обобщенных координат;
– оператор линейных преобразований обобщенных координат;
 – вектор-столбец обобщенных координат по оси Z;
– вектор-столбец обобщенных координат по оси Z;
 – масса автомобиля.
– масса автомобиля.
В частности, при  в формулу(1.1) входят наиболее часто используемые критерии плавности хода – среднее квадратическое значение вертикальных ускорений характерных точек подрессоренной массы. При
в формулу(1.1) входят наиболее часто используемые критерии плавности хода – среднее квадратическое значение вертикальных ускорений характерных точек подрессоренной массы. При  плавность хода оценивают только линейными перемещениями, и критерий будет иметь вид:
плавность хода оценивают только линейными перемещениями, и критерий будет иметь вид:
 (1.2)
(1.2)
Если при оценке плавности хода учитывать вертикальные ускорения, поперечные и продольные угловые ускорения, то формула(1.2) запишется следующим образом:

где  – коэффициенты угловых ускорений по осямx иy. Если принять во внимание только линейные перемещения кузова, то для оператораAi, входящего в(1.2), можно предложить линейное преобразование:
– коэффициенты угловых ускорений по осямx иy. Если принять во внимание только линейные перемещения кузова, то для оператораAi, входящего в(1.2), можно предложить линейное преобразование:
Где  – постоянный коэффициент (при z = 1; α= 3…4; φ= 2);
– постоянный коэффициент (при z = 1; α= 3…4; φ= 2);
ω1, ω2– частоты колебаний по осям x и y.
При допустимом значении ω< ω1 человек реагирует на треть производную абсолютных перемещений, при ω1< ω< ω2 на ускорение, при ω> ω2– на скорость перемещений. Если принимаем частоту колебаний до 20 Гц, то оператор линейных преобразований принимает вид

Коэффициент , входящий в (1.4), учитывает разницу в ощущениях человека при вертикальных и поперечных линейных перемещениях. Известно, что человек реагирует не только на линейные перемещения, на скорости и ускорения, но и на угловые колебания. Поэтому для угловых колебаний критерий плавности хода можно задать в следующем виде:

где  – оператор линейного преобразования.
– оператор линейного преобразования.
Согласно данным о пороге раздражения человеческого организма, коэффициентам, входящим в уравнение (1.5), можно дать значения, приведенные в табл.1.1.

Единый критерий плавности хода для легковых автомобилей можно использовать как коэффициент интенсивности восприятия колебаний человеческим организмом. При гармонических колебаниях коэффициент интенсивности выражают[1]:
где  - частота приведения; ω- частота колебаний;
- частота приведения; ω- частота колебаний;  - среднее квадратическое отклонение по оси z. Значения
- среднее квадратическое отклонение по оси z. Значения  при различных условиях приведены в табл. 1.2.
при различных условиях приведены в табл. 1.2.

Частотный состав вибраций принято делить на октавы. Октава — это полоса частот, в которой конечная граничная частота  в 2 раза выше начальной . Каждой октаве присвоен номер и она характеризуется среднимгеометрическим значением частоты октавной полосы
в 2 раза выше начальной . Каждой октаве присвоен номер и она характеризуется среднимгеометрическим значением частоты октавной полосы
|
|
|
 (1.6)
(1.6)
Для общей вибрации установлен нормируемый диапазон частот в виде октавных и третьоктавных полос. Диапазон частот разделен на семь октавных полос со средними геометрическими частотами 1; 2; 4; 8; 16; 31,6; 68 Гц. Каждая октава в свою очередь разделена на третьоктавные полосы со средними геометрическими частотами от 0,8 до 80 Гц.
Для каждой октавной и третьоктавной полосы регламентировано нормированное значение виброускорения. Допустимые значения виброускорений установлены на основе критерия «граница снижения производительности труда» для восьмичасовой продолжительности рабочей смены. Их значения для октавных полос при вертикальных и горизонтальных направлениях вибраций приведены в табл. 1.3. Там же указаны границы октавных полос и приведены весовые коэффициенты чувствительности человека к вертикальными горизонтальным вибрациям.
Предельные ускорения по безопасности здоровья в 2 раза выше приведенных в табл. 1.3, а соответствующие комфортным условиям — в 8,15 раза ниже норм уровня производительной работы.
Таблица 1.3
Частотные характеристики октавных полос н салитерные нормы
показателей вибрационной нагрузки на оператора
|
| б |
|
|
|
ИСПЫТАНИЯ АВТОМОБИЛЯ НА ПЛАВНОСТЬ ХОДА
Экспериментальные исследования колебаний и плавности хода автомобиля производятся как в лабораторных, так и в дорожных условиях. Наряду с общей оценкой плавности хода автомобиля определяются следующие отдельные параметры и характеристики, влияющие на нее и на колебания автомобиля:
1) величины подрессоренной и неподрессоренной масс и их распределение между передними и задними колесами;
2) радиус инерции подрессоренной массы;
3) вертикальные характеристики передней и задней подвесок;
4) угловая характеристика подвески;
5) характеристики шин;
6) характеристики амортизаторов;
7) характеристики сидений.
Величины подрессоренных и неподрессоренных масс и координаты их центров тяжести находят раздельным взвешиванием.
Вертикальные характеристики подвесок определяют при последовательномнагружении и разгружении автомобиля. При и вызываемые ими перемещения подрессоренной массы автомобиля по отношению к осям колес, т. е. статические прогибы подвески.
На рис. 1 показаны упругие характеристики подвесок с постоянной и переменной вертикальной жесткостью, определяемой тангенсом угла наклона кривой 

| Рис. 1. Упругие характеристики подвесок с постоянной и переменной жесткостью. |
Характеристика амортизатора устанавливает зависимость между силой сопротивления на рычаге (штоке) и его скоростью, равной скорости относительного перемещения подрессоренных и неподрессоренных масс автомобиля. Эта характеристика определяется на специальном стенде, причем сила измеряется датчиком (динамометром), а скорость изменяется регулированием числа оборотов электродвигателя или радиуса кривошипа.
На рис. 2 приведены характеристики гидравлического амортизатора и схема стенда; сплошные линии соответствуют частоте 600 кол/мин, а штриховые — частоте 300 кол/мин.
 Рис. 2. Характеристика гидравлического амортизатора и схема стенда для ее определения.
Рис. 2. Характеристика гидравлического амортизатора и схема стенда для ее определения.
|
Коэффициент сопротивления амортизатора определяется по его характеристике тангенсом угла наклона линии, проходящей между кривыми нагрузки и разгрузки.
Испытания амортизаторов многих автомобилей показывают, что коэффициент сопротивления изменяется в довольно широких пределах, но все же обычно не превышает 3 кн • сек/м (кГ • сек/см).
Характеристика сидений устанавливается измерением их деформаций под действием различных нагрузок. Следует отметить, что в некоторых случаях жесткость сидений является переменной.
|
|
|
Исследования колебаний и плавности хода автомобиля в лабораторных условиях проводятся различными медами. Один из них состоит в испытании автомобиля на стенде с беговыми эксцентричными барабанами или с движущимися бесконечными лентами, на которых установлены препятствия, возбуждающие колебания (рис. 3)
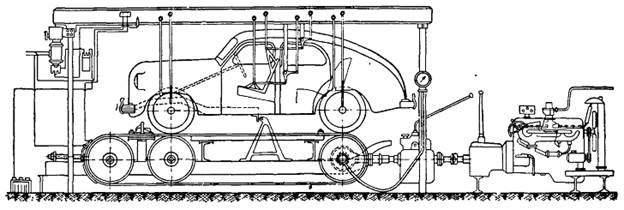
Рис 3
Кузов, сиденья, оси колес и другие точки автомобиля с правой и левой стороны, а также водитель и пассажиры соединяются тягами с самописцами, регистрирующими амплитуды их вертикальных и горизонтальных перемещений. Кроме того, колебания могут фиксироваться с помощью киносъемки.
Для исследования затухания колебаний препятствия, после прохода их под колесами, убираются с помощью специального устройства.
На рис. 4 приведен образец записи амплитуд колебаний кузова над передними и задними колесами, их осей, а также головы водителя, последовательно вызванных единичным препятствием высотой 50 мм и длиной 500 мм, при движении лент со скоростью 45 км/ч. Обработка этих записей позволяет определять ускорения колебаний водителя и различных точек автомобиля, которые могут быть найдены и непосредственно, с помощью акселерографов.


Рис 4
Отношение амплитуд двух последовательных перемещений вверх или вниз одной и той же точки подрессоренной илинеподрессоренной массы определяет декремент затухания колебаний.
Интенсивность затухания может быть оценена и при быстром опускании автомобиля, поднятого на специальных площадках, с регистрацией возникающих при этом колебаний.
Видоизменением этого метода является отпускание кузова, предварительно притянутого к осям колес автомобиля. Оба эти метода предусматривают возможность одновременного или последовательного возбуждения колебаний передней и задней подвесок.
Дорожные испытания автомобиля на плавность хода проводятся в естественных условиях или при переезде через искусственные эталонные препятствия, имеющие заданные размеры и профиль.
Оценка плавности хода автомобиля при дорожных испытаниях производится по записям акселерографов, установленных на сиденьях и определяющих вертикальные и горизонтальные ускорения, а также гироскопических приборов, регистрирующих угловые колебания.
Кроме того, в некоторых случаях применяется кино- или фотосъемка процесса переезда через препятствия и последующих колебаний различных точек автомобиля.
Плавность хода может оцениваться и субъективными ощущениями водителя и пассажиров. Нужно только иметь в виду, что вследствие физиологических особенностей разных людей их реакция на колебания автомобиля не всегда одинакова.Из объективных показателей плавности хода автомобиля, наряду с частотами, весьма большое значение имеют ускорения и их производные по времени. При этом одни и те же ускорения могут вызывать различные ощущения в зависимости от амплитуд, частот и продолжительности колебаний.
Испытания показывают, что, например, ускорения в 1,5 м/сек2 при амплитуде 20 мм и частоте 150 кол/мин становятся тягостными в случае систематического длительного их повторения. Если же ускорения увеличиваются до 2,5 м/сек2, то те же ощущения наступают уже через несколько минут. Ускорения свыше 3,5 м/сек2 при амплитуде 40—50 мм и частоте более 60 кол/мин считаются недопустимыми, так как вызывают быстрое утомление, а ускорения 5,5 м/сек2 при 70—80 кол/мин являются вредными.
Плавность хода автомобиля можно оценивать и по допустимому числу различных ускорений на 1 км пройденного автомобилем пути, пользуясь следующей шкалой (табл. 2.1).
Таблица 2.1

Согласно этой шкале плавность хода, например, неудовлетворительна, если на 1 км возникает более 10 ускорений в пределах 5—7 м/сек2. Если на том же расстоянии ускорения в 2—3 м/сек2 появлялись не более 12—15 раз, то плавность хода автомобиля считается хорошей.
Такая система оценки плавности хода может использоваться при сравнительных испытаниях различных автомобилей на одних и тех же участках дорог.
Теоретический анализ и обработка данных экспериментальных исследований колебаний и плавности хода автомобиля чрезвычайно сложны и трудоемки.
Однако начавшееся в последнее время применение в автомобилестроении электронно-вычислительных машин дает возможность не только резко облегчить и ускорить решение этих задач, но и без допущений и упрощений, неизбежных при обычных «ручных» расчетах, определять конструктивные параметры автомобиля, обеспечивающие ему оптимальную плавность хода.
|
|
|
